一种数字平行车云端监控系统及方法与流程
本发明涉及无人车驾驶控制,尤其是涉及一种数字平行车云端监控系统及方法。
背景技术:
1、数字平行车监控系统是目前无人驾驶系统中最核心关键系统之一。是在无人驾驶车辆,取消驾驶室后的“真无人”车辆在云端的平行车监控系统。其拥有自动化程度高、灵活性强、高度安全性等特点。随着后数字平行车监控系统在无人驾驶场景下的应用,将会给无人驾驶行业带来质的发展。
2、在现有技术(cn116125996a)中,提供了一种无人驾驶车辆的安全监控方法及系统,该方案包括:建立预设区域内多辆无人驾驶车辆与后台服务器的通讯关系;在预设区域内多辆无人驾驶车辆行驶时,对无人驾驶车辆的内部进行环境感知,得到第一感知数据;对无人驾驶车辆的外部进行环境感知,得到第二感知数据;后台服务器根据第一感知数据及第二感知数据,确定多辆无人驾驶车辆的类型,根据所述类型执行对应级别的安全监控。该方案能够实现对预设区域内多辆无人驾驶车辆进行安全监控,同时基于多辆无人驾驶车辆的类型,根据所述类型执行对应级别的安全监控,降低了后台服务器的负载,提高了监控资源的利用率。
3、在现有技术(cn116091688a)中,提供了一种数字孪生车间设备模型重建方法,该方案为一种将三维网格模型重建工作与表面纹理添加融合成一套连续的执行流程,通过地面激光扫描仪,获取需要重建三维模型的设备点云数据,将点云数据使用相应算法进行处理和表面重建后,获得设备外壳纯色模型,减少了需要人工手动建模的工作量。而且,后续模型的纹理添加只需采集纹理图像,与三维模型进行手工标定即可实现纹理映射,获得逼真的三维彩色模型。
4、在现有技术(cn115871806a)中,提供了一种基于无人车搭载的景区生态监测系统及其方法,该方案包括:监测车、控制终端和减震组件,监测车包括车架、两个履带、摄像头和控制电板,减震组件包括连接板、减震板、两个减震架和若干减震柱,景区管理人员通过控制终端控制车架在景区内移动,车架移动的过程中,通过摄像头拍摄景区生态影像,并将影像发送至控制终端显示,车架用于带动摄像头在景区内移动,使得景区管理人员实时了解景区生态情况,控制电板控制所述摄像头的运行,该方案解决了现有景区监测系统只能监测固定位置生态,无法对多数地区进行监测的问题。
5、综上所述,现有技术缺少一种针对数字平行车的研究和方案,尤其是针对这一方案的监控能力几乎很少涉及。
技术实现思路
1、本发明的目的在于,需要提出一种能够对数字平行车进行监控的方案。
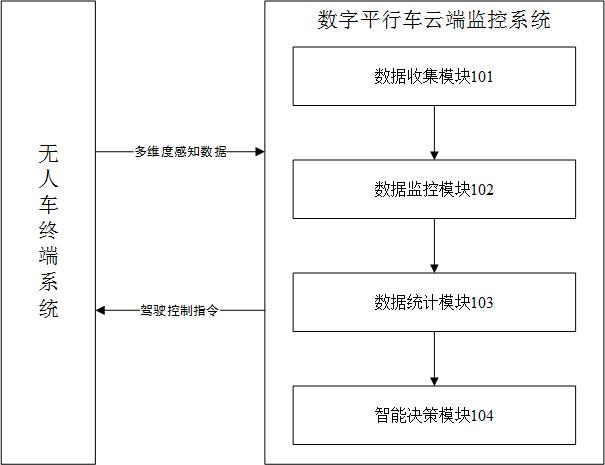
2、为了解决上述技术问题,本发明实施例提供了一种数字平行车云端监控系统,包括:数据收集模块,其与无人车终端系统通信,用于按照数据基本类型收集无人车多种维度的感知数据;数据监控模块,其用于根据所述感知数据,开展模型和实时数据的分类监控;数据统计模块,其用于根据分类监控数据,按照数据功能类型,对无人车行驶状态的水平等级进行统计分析;智能决策模块,其用于根据无人车的数据统计分析结果,对安全运行状态进行处理,生成包含故障处理控制和安全行驶控制的驾驶控制指令,从而将所述驾驶控制指令反馈至所述无人车终端系统。
3、优选地,所述数据收集模块包括:本车模型构建单元,其用于根据多维度感知数据,建立包含当前无人车各维度硬件在内的本车模型,从而将所述多维度感知数据中的剩余数据进行输出;模型参数构建单元,其用于根据所述剩余数据,对各维度硬件模型的模型参数进行分类,从而搭建各维度硬件模型的转件抽象建模;运行参数构建单元,其用于根据所述剩余数据,对无人车实际运行参数进行归类提取,其中,所述无人车实际运行参数包括但不限于:车辆状态数据、运行报警数据、运行统计数据和周围环境数据。
4、优选地,所述本车模型包括:自动驾驶域控制器模型、各传感器模型、车辆底盘模型和车身轮廓模型。
5、优选地,所述模型参数构建单元,其还用于为所述本车模型设置各类运行状态的阈值并计算指标参量,所述阈值包括但不限于速度类阈值、方向类阈值、加速度类阈值、剩余电量类阈值和制动类阈值。
6、优选地,所述模型参数构建单元,其还用于在数据输入接口处设置控制层并为所述控制层配置数据安全绑定机制,以使得本模块所收集到的数据能够有效屏蔽非车辆数据的干扰。
7、优选地,所述运行参数构建单元包括:车辆状态数据提取子单元,其用于提取所述剩余数据中的车辆实时状态数据并进行动态呈现,所述车辆实时状态数据包括但不限于运行速度、加速度、运行里程、剩余电量和车轮转向;运行报警数据提取子单元,其用于提取所述剩余数据中的车辆实时状态数据和阈值数据,并将所述车辆实时状态数据转换为异常数据报警指示;运行统计数据提取子单元,其用于提取所述剩余数据中的里程和位置进行收集,并按任务和时间维度分别进行数据统计查询;周围环境数据提取子单元,其用于提取所述剩余数据中的行驶环境和近场环境数据。
8、优选地,所述数据监控模块包括:模型域监控单元,其用于根据归类后的无人车实际运行参数和模型参数,对所述本车模型中的各维度硬件模型进行实际动态驾驶模拟监控并呈现;关键实时数据监控单元,其用于根据归类后的无人车实际运行参数,按照近程驾驶和远程驾驶,对关键实时数据进行监控,所述关键实时数据包括但不限于:车轮状态、每日里程和电量类数据;车辆档案单元,其用于根据归类后的无人车实际运行参数和模型参数,对无人车的静态数据进行监控。
9、优选地,所述数据统计模块中,通过如下方式来完成数据的统计分析:在当前数据的功能类型为安全因素评价类型时,将相应项数据与对应项阈值进行对比,确定当前项数据是否行驶在安全状态范围内;在当前数据的功能类型为指示信号类型时,判断当前所输出的指示信号是否与当前无人车的行驶路况相匹配;在当前数据的功能类型为与维修相关的指标数据类型时,判断每项所述指标数据的健康水平,所述健康水平包括健康、良好和待维修。
10、优选地,所述智能决策模块,其还用于将所述数据统计分析结果进行融合感知,确定当前无人车保持安全行驶状态的驾驶策略,从而生成所述驾驶控制指令,所述驾驶策略包括但不限于:车辆方向有横向偏差的车道线回归处理策略、道路颠簸严重的降速或缓停处理策略、遇到障碍物的绕行或减速或急停处理策略、以及无故障状态下的安全行驶处理策略。
11、优选地,所述系统还包括:数据管理模块,其用于按照预设的存储方式存储所述本车模型和所述数据统计分析结果,所述预设的存储方式选自mysql、redis、postgresql、文件存储和clickhouse中的一种或几种。
12、优选地,所述系统与云端数据服务器通信,并将所述系统的动态监控及运行数据同步到所述云端数字服务器中,以构造数字平行车。
13、另一方面,提供了一种数字平行车云端监控方法,所述数字平行车云端监控方法按照如上述所述的数字平行车云端监控系统来实现,其中,所述方法包括:与无人车终端系统通信,按照数据基本类型收集无人车多种维度的感知数据;根据所述感知数据,开展模型和实时数据的分类监控;根据分类监控数据,按照数据功能类型,对无人车行驶状态的水平等级进行统计分析;根据无人车的数据统计分析结果,对安全运行状态进行处理,生成包含故障处理控制和安全行驶控制的驾驶控制指令,从而将所述驾驶控制指令反馈至所述无人车终端系统。
14、与现有技术相比,上述方案中的一个或多个实施例可以具有如下优点或有益效果。
15、本发明提出了一种数字平行车云端监控系统及方法。该系统及方法在三维建模的基础上,提供针对无人车不同领域的模型细化的运行情况的监控,更强调是建模后的实际运行情况;在对本车的实时监控下,具备生产要素的监控统计,解决了运行态加生产态的同步监控和统计分析能力;不止关注于监测本身,在监控的同时,还会将统计分析后的数据,进行智能决策规划,从而完成对无人车的动态规划控制。这样,本发明不仅满足对真实无人车的监测还对无人车进行反向控制。另外,本发明所构建的数字平行车可以实现云端感知、决策、控制等逻辑,同时可满足无人车和数字平行车的数据双向通信和安全绑定规则。此外,本发明还会将模型数据、监控数据和统计分析数据进行实时的管理,存储方案不是单一的方式,而是采用结构化和非结构化的双重方案进行数据分布式存储。
16、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!