RIS辅助通信系统中无人机部署策略研究
本发明涉及通信领域、无人机和ris,具体而言,尤其涉及一种ris辅助通信系统中无人机部署策略研究。
背景技术:
1、无人机作为信息时代高技术含量的产物,随着研发技术的逐渐成熟,其制造成本大幅度降低,在军用和民用领域得到了广泛的应用。由于无人机能够做到空中悬停和灵活部署,因此常作为空中基站或中继参与通信服务。但由于城市环境复杂,高大建筑物的存在遮挡了基站与无人机间的视距传输,影响通信系统的性能。因此研究学者提出了采用智能可编程表面(ris)进行辅助通信。ris可以通过改变结构和排列方式,构建可控的无线环境,由于ris具有体积小、质量轻、易于集成、可部署在建筑物表面等特点,成为了通信系统中一种新兴范式,能够满足6g通信需求。
2、虽然引入ris能解决基站和无人机之间因为高大建筑物存在而导致的非视距传输问题,但是单个ris如何辅助多架无人机参与通信是待解决的第一个难题。除此之外,ris相位会影响基站与无人机间回程链路的速率,无人机的高度不仅影响回程链路速率,还会影响无人机和用户间的前传链路速率,当前传速率大于回程速率时,系统会发生中断。因此如何避免系统发生中断是要解决的第二个难题。
3、针对以上问题,本发明提出了一种ris辅助通信系统中无人机部署策略研究,采用weiszfeld算法解决单ris辅助多无人机参与通信的问题,采用ris相位和无人机高度联合优化算法,调整链路速率,增强系统稳定性。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种ris辅助通信系统中无人机部署策略研究,以解决由于城市建筑物遮挡造成视距传输受阻,无线通信稳定性差的问题。
2、本发明采用的技术手段如下:
3、一种ris辅助通信系统中无人机部署策略研究,包括如下步骤:
4、s1:对研究内容进行场景预部署;
5、s2:构建ris辅助通信系统中无人机部署策略研究系统模型,所述ris辅助无人机通信系统模型包括信道模型、链路信噪比和链路速率模型;
6、s3:基于所述空中ris辅助无人机通信系统模型得到优化问题,所述优化问题为最小化通信系统的中断概率;
7、s4:将所述优化问题分为ris的相位优化和无人机的高度优化两个子问题进行求解,得到最优决策方案。
8、进一步地,s1具体包括如下步骤:
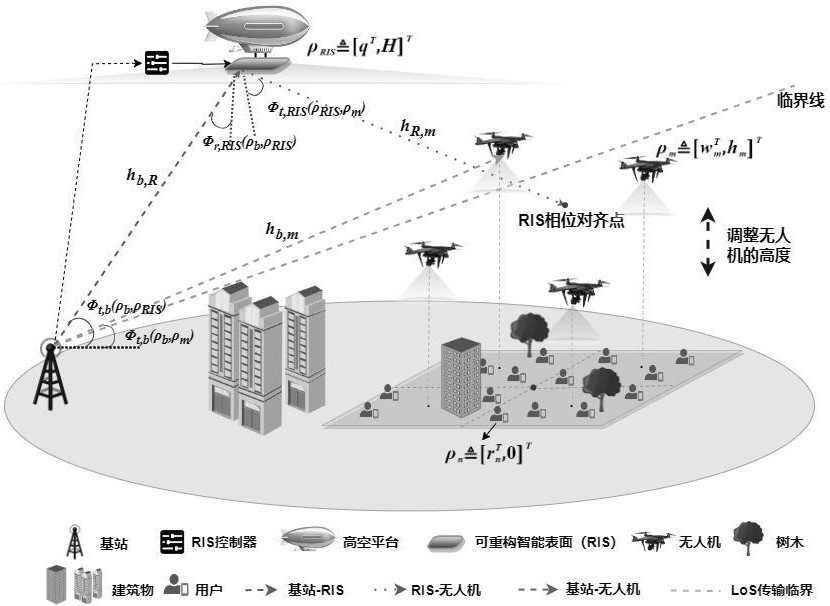
9、s1-1:设置一个大小为α的圆盘形区域,区域内包含一个源基站、一个部署单ris的高空平台、多个障碍物、多个地面用户、多架无人机,地面用户随机分布,无人机2d位置根据地面用户的分布部署。
10、进一步地,s2具体包括如下步骤:
11、s2-1:建立ris辅助无人机通信系统,所述ris辅助无人机通信系统包括一个源基站、一个空中ris、m0个无人机和n0个随机分布的地面用户,基站配备了带有mb个天线的均匀线性阵列(ula),用户配备全向天线,无人机配有定向天线,空中ris由带有nr个反射元件的ula组成;
12、s2-2:建立信道模型,假设空中ris足够高,因此基站到ris以及ris到无人机的回程链路采用视距传输模型。由于无人机高度可变,基站到无人机的回程链路采用视距传输模型。无人机到地面用户的前传链路采用莱斯信道模型;
13、s2-3:建立链路速率模型,表明回程链路速率和前传链路速率模型。
14、进一步地,s2-2具体包括如下步骤:
15、因为假设源基站天线和ris元件部署为ula,所以基站到ris信道系数hb,r、ris到无人机信道系数和基站到无人机信道系数hb,m可以通过通信链路的出发角和到达角(aod/aoa)来建模,因此可以表示为:
16、
17、
18、
19、在所提出的模型中,假设无人机和地面用户之间的无线链路,经历了遵循莱斯分布的小规模衰落。因此,无人机m与地面n的信道系数:
20、
21、进一步地,s2-3具体包括如下步骤:
22、回程链路信噪比为:
23、
24、其中pb,m是基站到无人机m的发射功率,是基站-ris的发射波束形成向量;是基站-无人机基站的发射波束形成向量;k∈{0,1}是二进制变量,k=1表示无人机足够高可以与源基站建立视距传输,反之,k=0;是ris反射元件的相位矩阵,第n个反射元件的反射幅度和相位分别是αn和θn∈[0,2π),假设σ2是链路的噪声功率。
25、前传链路的信噪比为:
26、
27、其中,pm和gm分别是无人机m的发射功率和天线增益。
28、回程链路速率为:
29、
30、其中,bb代表回程链路总带宽;m0代表无人机总数。
31、无人机与地面用户之间采用时分复用进行建模,因此前传链路速率为:
32、
33、其中τn是用户n占用的时间。
34、进一步地,s3具体包括如下步骤:
35、基于上述所述,因此,优化问题可表示为:
36、
37、约束条件为:
38、c1:hmin≤h≤hmax
39、c2:0≤θn≤2π,n∈{1,,nr}
40、进一步地,s4具体包括如下步骤:
41、s4-1:利用weiszfeld算法对ris相位进行间接优化;
42、s4-2:通过逐次凸逼近(sca)算法将优化目标转换为凸优化问题;
43、s4-3:采用交替优化算法求最优解。
44、进一步地,s4-1具体包括如下步骤:
45、由于ris相位和无人机高度之间耦合度高,因此将原问题拆分成了两个子问题,分别是:固定无人机高度优化ris相位和固定ris相位优化无人机高度。最后将两个子问题交替优化。
46、在子问题一中,无人机高度是个常量,优化ris相位。为了最小化系统中断概率,则要最大化回程链路速率,因此要最大化回程链路信噪比。优化问题可以等效为:
47、
48、约束条件为:
49、c1:0≤θn≤2π,n∈{1,,nr}
50、所以为了实现中断概率最小化的数学目标,需要对齐相位使反射信号被相干地添加到无人机ρm,假设:
51、
52、其中是任意相位。然而,由于有m0个无人机参与服务,对于每都是不同的,因此,应该决定导致该问题pareto-optimum的相位对齐点换句话说,对于给定的ρris和我们将设置为:
53、
54、根据相位对其点回程链路信噪比转换为:
55、
56、其中是ris到ρm的无源波束形成增益。因为ris元件数是nr,因此其中当即时,达到峰值,链路信噪比最大,因此应该让和ρm足够接近。用相对于ρm的一阶泰勒来近似sin-aoa偏差的绝对值,如下所示:
57、
58、因此优化问题被转换为:其中为了满足多架无人机的通信需求,提高所有无人机链路的信噪比,因此需要让相位对齐点到所有无人机的距离和最小。所以该问题可以采用weiszfeld算法。
59、进一步地,s4-2具体包括如下步骤:
60、子问题二中,ris元件相位是一个常量,优化无人机的高度。由于无人机到地面用户采用莱斯信道模型,因此可以利用|g[]|2的累积密度函数进行概率求解。|g[]|2的累积密度函数表达式为其中q(x,y)是标准的marcum-q函数。对中断概率进行整理,根据概率论相关知识,应用|g[]|2的累积密度函数表达式,子问题二的优化问题可表达为:
61、
62、约束条件为:
63、c1:hmin≤h≤hmax
64、由于marcum-q函数难以直接求解,因此采用包含指数函数的上下界对该问题进行近似求解。通过判断与以及与的大小关系,优化问题可近似为四种情况。无论哪种情况,优化目标都是一个非凸问题。
65、四种情况下的优化问题可等效为:
66、
67、约束条件为:
68、c1:hmin≤h≤hmax
69、f(hm)函数为非凸函数,为解决以上问题,本课题提出采用逐次凸逼近(sca)算法,将非凸函数f(hm)转换为凸函数再利用凸优化方法,使用cvx工具包进行求解。
70、进一步地,s4-3具体包括如下步骤:
71、由于ris元件相位和无人机高度两个变量高度耦合,因此将一个问题分解成了两个子问题。最后使用交替优化算法求解。首先初始化无人机的高度,根据无人机初始高度求出子问题一ris元件相位的解。把子问题一中得到的ris元件相位作为子问题二中ris元件相位初始值,求出子问题二无人机高度的解,两个子问题交替求解,直到满足收敛条件。
72、较现有技术相比,本发明具有以下优点:
73、本发明提供的ris辅助通信系统中无人机部署策略研究,在考虑城市环境下利用无人机作空中基站参与基站和地面用户之间的无线通信,由于高大建筑物阻碍基站与无人机之间的视距传输,因此本发明引入单ris进行辅助通信,为基站和无人机之间提供视距传输链路。然而单ris为多架无人机提供辅助通信时系统不稳定,容易发生中断问题。因此本课题引入无人机高度这一决策变量,通过联合优化ris相位和无人机高度来提高通信系统的稳定性。
74、基于上述理由本发明可在通信领域、无人机领域和ris领域广泛推广,可以应用于对系统稳定性要求高的救援行动、交通监测等方面。因此ris辅助通信系统中无人机部署策略研究具有重大意义。
- 还没有人留言评论。精彩留言会获得点赞!