一种无人机集群组网的通信方法与流程
本发明涉及无人机通信领域,具体涉及一种无人机集群组网的通信方法。
背景技术:
1、无人机集群在执行协同搜索、协同干扰以及集群对抗等任务时对于电磁信号具有极高的隐蔽性要求,若采用全空间式的波束扫描会增加电磁暴露风险。并且,全空间式的波束扫描因为其在全时段都开启全空间全覆盖范围的扫描功率,也会增加无人机的能量耗损,导致有效执行时间缩短无法匹配任务需求。无人机直接的通信距离越大则通信耗能越大,在有限的电量下保持无人机集群之间的通信质量也是当下无人机集群组网运用的课题。
技术实现思路
1、为了解决无人机集群之间互相通信的能量耗损问题,本申请提供一种无人机集群组网的通信方法。
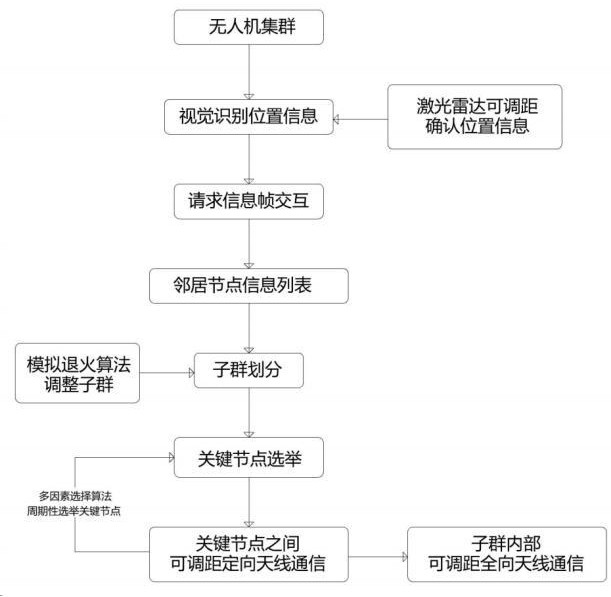
2、一种无人机集群组网的通信方法,包括以下步骤:
3、获取当前无人机的邻居节点的位置信息,通过请求信息帧建立邻居节点信息列表;
4、根据所述邻居节点信息列表对无人机集群进行子群划分,得到多个无人机子群;
5、选择每个所述无人机子群的关键节点,并且周期性地对所述关键节点进行重新选举;
6、每个所述关键节点的无人机之间利用定向天线与关联的关键节点进行定向调距通信,根据所述关键节点无人机之间的距离、所述关键节点无人机的定向天线的最大发射功率以及最小发射功率计算定向天线的适当发射功率,具体如下:
7、
8、其中,p1表示定向天线的适当发射功率,pmax表示无人机的定向天线的最大发射功率,pmin表示无人机的定向天线的最小发射功率,d表示关键节点无人机到另一关键节点无人机的距离,dmax表示关键节点无人机之间的最大距离,n为衰减参数;
9、所述关键节点的无人机利用全向天线与所属无人机子群中的所有无人机通信,根据所述关键节点的无人机的剩余电量、所属无人机子群的平均通信距离以及所述无人机子群的无人机数量计算全向天线的适当发射功率,具体如下:
10、
11、其中,p2表示全向天线的适当发射功率,da表示无人机子群的平均通信距离,n表示无人机子群的无人机数量、e表示关键节点的无人机剩余电量,k为常数,m为数量权重系数,f(e)为电量衰减函数。
12、进一步地,计算定向天线的适当发射功率,还包括根据信道质量和多路径衰减情况,动态调整定向天线的适当发射功率,具体如下:
13、其中,a表示信道增益因子,根据信道质量以及信道干扰情况得到,取值范围为0-1,b表示多路径衰减补偿因子,根据多路径传播情况得到,取值范围为0-1。
14、进一步地,每个所述关键节点的无人机利用定向天线与关联的关键节点进行定向调距通信,还包括调节所述定向天线的角度,具体包括:
15、获取关联的关键节点的视觉图像位置,根据视觉图像位置计算所述关键节点的无人机与关联的关键节点之间的距离、水平方向角度以及垂直方向角度,根据所述水平方向角度以及垂直方向角度调节定向天线的角度。
16、进一步地,根据所述邻居节点信息列表对无人机集群进行子群划分,具体包括:
17、设置子群数量以及距离阈值,将其中一个无人机设为子群的初始节点,访问其他无人机节点,如果与所述初始节点的距离小于距离阈值则将该无人机节点加入该子群,直到该子群内部的节点数量达到所述子群数量。
18、进一步地,根据所述邻居节点信息列表对无人机集群进行子群划分,还包括利用模拟退火算法对子群进行调整。
19、进一步地,周期性地对所述关键节点进行重新选举,具体包括:
20、构建加权函数如下:
21、
22、其中,i表示当前无人机的编号,j表示与当前无人机通信的另一无人机,dij表示当前无人机与另一无人机之间的距离,ej表示另一无人机的电量,for j incommunicating drones是一个迭代结构;
23、根据所述加权函数构建改进加权函数如下:
24、
25、其中,w1表示所述加权函数,α为常数,表示节点中心性对加权能力的影响;centrality_weight为常数,表示节点中心性的权重,centrality表示节点中心性;β为常数,表示距离对加权能力的影响;distance_weight 为常数,表示距离的权重,normalized_distance表示节点之间的距离的归一化值;γ为常数,表示负载对加权能力的影响;load_weight为常数,表示负载的权重;normalized_load表示负载的归一化值;
26、根据所述改进加权函数选择具有最高加权能量的无人机节点作为新的关键节点。
27、进一步地,获取当前无人机的邻居节点的位置信息,具体包括:
28、选定其中一个无人机为基点无人机,利用fcos目标检测算法识别基点无人机的周围邻居,获取每一邻居的视觉图像位置信息,根据所述视觉图像位置信息调整激光雷达的发射功率,对周围的邻居发射激光雷达二次确认邻居位置信息,得到最终无人机的位置信息。
29、进一步地,根据所述视觉图像位置信息调整激光雷达的发射功率,具体包括:设置不同距离档位的激光雷达发射模式,根据所述邻居的视觉图像位置信息计算基点无人机与邻居的邻居距离,根据所述邻居距离选择适当档位的激光雷达发射模式。
30、进一步地,所述邻居节点信息列表包括无人机的编号、功能、位置坐标、运动状态以及剩余电量。
31、本发明还公开了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一项无人机集群组网的通信方法。
32、本发明的有益效果在于:
33、(1)将无人机集群进行子群划分,子群与子群之间通过定向天线进行通信,既能节省无人机通信的能量成本,又能定向定距的传输信号,避免被窃取电磁信号或被截断攻击。
34、(2)通过子群划分并计算当前通信所需的适当的天线发射功率,在完成通信要求的前提下节省自身电量,延长使用时间。
技术特征:
1.一种无人机集群组网的通信方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的无人机集群组网的通信方法,其特征在于,计算定向天线的适当发射功率,还包括根据信道质量和多路径衰减情况,动态调整定向天线的适当发射功率,具体如下:
3.根据权利要求1所述的无人机集群组网的通信方法,其特征在于,每个所述关键节点的无人机之间利用定向天线与关联的关键节点进行定向调距通信,还包括调节所述定向天线的角度,具体包括:
4.根据权利要求1所述的无人机集群组网的通信方法,其特征在于,根据所述邻居节点信息列表对无人机集群进行子群划分,具体包括:
5.根据权利要求1所述的无人机集群组网的通信方法,其特征在于,根据所述邻居节点信息列表对无人机集群进行子群划分,还包括利用模拟退火算法对子群进行调整。
6.根据权利要求1所述的无人机集群组网的通信方法,其特征在于,周期性地对所述关键节点进行重新选举,具体包括:
7.根据权利要求1所述的无人机集群组网的通信方法,其特征在于,获取当前无人机的邻居节点的位置信息,具体包括:
8.根据权利要求7所述的无人机集群组网的通信方法,其特征在于,根据所述视觉图像位置信息调整激光雷达的发射功率,具体包括:
9.根据权利要求1所述的无人机集群组网的通信方法,其特征在于,所述邻居节点信息列表包括无人机的编号、功能、位置坐标、运动状态以及剩余电量。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-9任一项所述的无人机集群组网的通信方法。
技术总结
本发明公开了一种无人机集群组网的通信方法,将无人机集群划分为多个子群,选择每个所述无人机子群的关键节点,并且周期性地对关键节点进行重新选举;每个关键节点的无人机之间利用定向天线与关联的关键节点进行定向调距通信,根据关键节点无人机之间的距离、关键节点无人机的定向天线的最大发射功率以及最小发射功率计算定向天线的适当发射功率;关键节点的无人机利用全向天线与所属无人机子群中的所有无人机通信,根据关键节点的无人机的剩余电量、平均通信距离以及无人机子群的无人机数量计算全向天线的适当发射功率。将无人机集群进行子群划分,子群与子群之间通过定向天线进行通信,定向定距的传输信号,避免被窃取电磁信号或被截断攻击。
技术研发人员:余越,刘一彤,李凯,高万春,徐超洋
受保护的技术使用者:杭州牧星科技有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!