一种基于差分隐私的位置保护的任务分配方法
本发明涉及群智感知中的隐私保护领域,特别涉及一种基于差分隐私的位置保护的任务分配方法。
背景技术:
1、无线通信技术的发展和移动智能设备的普及,这些都促使着以设备为中心的无线传感器网络逐渐向以人为中心的移动群智感知网络转变。移动群智感知从通过定点的传感器采集定点的数据,到如今通过人们携带的移动智能设备(智能手机、gps、智能手环)收集数据,数据收集更加灵活、便捷,成本极大降低。
2、目前移动群智感知已进入2.0时代,它的应用场景越来越广泛,如智慧交通,智慧家居、智慧城市等。移动群智感知网络的工作方式为给一组拥有移动智能设备的普通用户分发感知任务,并处理和分析感知数据以提供各类服务,用户既是感知数据的提供者,也是服务的受用者。把普通用户视作基本传感器单元去完成感知任务,分析和提取感知数据以给任务发布者提供个性化服务。
3、在移动群智感知应用中,常常需要招募大量用户来参加各类感知任务。然而,服务器在选择用户时,用户的位置是的重要因素,用户的选择是基于他们的真实位置,所以用户在参与任务的同时往往也面临着严重的隐私泄露问题,例如,内部不可信的服务器可能会出卖用户位置等敏感信息以获取利润,或外部恶意攻击者通过监听用户流量以获取用户的隐私信息。不解决隐私保护问题,将极大降低参与者的积极性,所以如何在保证用户的隐私信息情况下实现任务分配是当前的研究热点。
4、现有位置隐私保护研究大都聚焦于加密技术、k-匿名技术等。如专利申请号为201810209292.8的一种基于位置k-匿名的个性化位置隐私保护方法,其提供了基于位置k-匿名的位置隐私保护,可以在一定程度上保护了用户的位置隐私。但是现有技术中基于加密技术位置隐私保护方案主要存在需要服务器可信和计算/通信开销大问题。基于k-匿名技术位置隐私保护方案容易遭到同质攻击。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种基于差分隐私的位置保护的任务分配方法,采用新方案实现群智感知中位置保护的任务分配方法。
2、为了实现上述目的,本发明采用的技术方案为:一种基于差分隐私的位置保护的任务分配方法,包括如下步骤:
3、(1)对任务地图进行划分,将地图划分为多个子区域并对每个子区域编号,记录每个子区域的编号以及子区域内任务数;
4、(2)将每个子区域编号以及子区域内任务数发送给用户,用于接收到任务列表信息后,将自己愿意参与的任务子区域编号以及自己所处位置坐标进行扰动后得到的扰动位置信息发送至服务器中;
5、(3)对每个子区域内自愿参加任务的用户进行距离判断,选择距离任务点近的一个或多个用户作为任务参与者进行任务分配。
6、步骤(1)中,利用希尔伯特曲线将地图划分成多个子区域。
7、扰动位置的求解包括将用户坐标通过希尔伯特映射转变成一维的希尔伯特指数然后再给希尔伯特指数添加拉普拉斯噪声得到最终的用户真实位置对应的扰动位置信息。
8、根据用户位置的希尔伯特指数和任务位置的希尔伯特指数之间的距离来选择距离较短的用户来参与任务,通过将拉普拉斯噪音视为随机变量,将用户位置的希尔伯特指数和任务位置的希尔伯特指数之间的距离视为参数,通过对拉普拉斯密度函数进行积分并得到的概率,并基于概率高距离任务点近来为每个任务点选出k个参与者。
9、在步骤(1)中,利用n阶希尔伯特曲线将任务地图划分为2n-1×2n-1的子区域,服务器对子区域进行编号并记录子区域内任务点的数量,其中n为系统参数,由当前区域的任务数以及任务粒度需求来确定大小;服务器任务清单列表记为t={n,(r1,n1),…,(ri,ni),…(rk,nk)},ri表示第i个子区域编号,ni表示第i个子区域内任务点数量,服务器发布任务清单t给用户。
10、用户真实坐标的位置扰动方法包括:
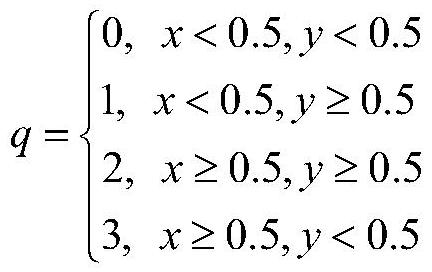
11、首先将二维坐标(x,y)映射成一维的希尔伯特指数q,二维坐标映射为希尔伯特指数过程,希尔伯特指数初始为q=0,然后包括如下步骤:step1、计算q值,用户利用以下计算其位置(x,y)对应的q值:
12、
13、step2、根据step1中的q对位置(x,y)作hq更新:
14、
15、
16、step3、当递归次小于参数eps或者更新后的坐标不为(0,0)则转到step1,并更新指数q=(q+q)/4,否则递归结束,得到位置(x,y)的希尔伯特指数q,其中eps为系统参数。
17、为与坐标对应的希尔伯特指数q添加拉普拉斯噪音,为希尔伯特指数添加噪声的公式如下:
18、
19、对任务参与者的选择包括如下步骤:
20、在步骤(3)中,在单任务场景下,对于任意两个参与者ui和uj来说,由于服务器只知道两个参与者扰动后的希尔伯特指数和通过将和作为参数,将噪声作为变量,通过二重积分计算选择更高概率离任务位置更近的用户,即通过计算p(|hi-ht|-|hj-ht|>0)选择有更高概率离任务点更近的用户作为任务参与者,其计算公式如下:
21、
22、在多任务场景下,首先对每个任务的参与者进行排序,再处理不同任务的参与者重复冲突问题;假定任务ti和tj的第k个候选者发生重复,则解决方案如下:其中,记sdik和sdjk是任务ti和任务tj的第k个参与者ucf到各自任务点的希尔伯特指数距离,记sdi(k+1)是ti的第k+1个参与者ui到ti的距离,sdj(k+1)是tj的第k+1个参与者uj到tj的距离,其表示如下:
23、
24、对于以上情况,计算p=p((sdi,k+sdi,(k+1))-(sdj,k+sdj,(k+1))>0),若p的概率大于0.5,则将候选参与者ucf分配给ti,否则将则将候选参与者ucf分配给ti,其计算公式如下:
25、
26、将多任务场景下的参与者冲突分为前序冲突和重复冲突,前序冲突检测过程为按任务循环检测候选参与者,即首先顺序检测每个任务的第一个候选参与者是否已经被选为正式参与者,若第一个候选参与者没有被选为正式参与者则没有发生前序冲突,等待检查重复冲突,若冲突,则将该候选参与者删除,下一个候选参与者成为新的第一位候选参与者,如此直到确定该任务的第一个候选参与者没有前序冲突;直到所有任务的第一个候选参与者都没有前序冲突,再按任务循环检测重复冲突,若所有任务的第一位候选参与者都不重复,则没有发生重复冲突,若存在任务的第一位候选参与者有重复冲突,则计算概率从而比较距离确定任务分配候选参与者,直至所有任务的第一个候选参与者没有前序冲突和重复冲突,则将所有任务第一个候选选为正式参与者,在重新按列检查所有入任务的新的第一位候选参与者,如此循环,直到每个任务确定k个正式参与者。
27、本发明的优点在于:通过n阶希尔伯特曲线划分地图以保护任务点位置隐私,解决攻击者通过任务点位置推导用户位置范围问题。同时,方案利用希尔伯特映射将用户的二维位置坐标映射成一维的希尔伯特指数,并对希尔伯特指数添加噪音以保护用户位置隐私。由于较小改变希尔伯特指数可能使得其对应坐标变化较大,所以通过对希尔伯特指数添加噪音能够解决一般差分隐私隐私保护度较弱的问题。此外,希尔伯特指数具有数值越接近,其对应坐标位置具有更大概率越接近,所以方案能够选择合适的参与者,解决用户选择准确度的问题。
28、采用基于差分隐私的位置隐私保护方法,本文通过希尔伯特曲线划分地图,将地图划分成多个子区域,并以区域号代替任务点位置,由于没有加解密操作,该部分计算量可忽略不计,在一定程度上保护了用户位置隐私,且引入希尔伯特指数的概念,差分隐私结合希尔伯特映射,在相同隐私预算情况下,能够获得更高的隐私保护度,所以较好地平衡了隐私保护程度与用户选择准确度问题。此外本文设置不同用户有不同的隐私保护等级,并采用三重积分计算概率并选出合适的参与者,在一定程度上提高了参与者选择准确度。
- 还没有人留言评论。精彩留言会获得点赞!