智能视觉辅助系统用于动态亮度调整的方法和系统与流程
本发明涉及智能交通辅助系统领域,具体而言,涉及一种用于夜间驾驶的智能视觉辅助系统。该系统通过采用图像处理技术、眼部追踪监测技术以及自适应亮度调整方法,旨在提升驾驶者在夜间行车过程中的视觉感知能力,并有效防止强光干扰,以提供更加安全和舒适的驾驶体验。涵盖了计算机视觉、图像处理、交通安全系统、眼球运动分析及液晶显示技术等多个方面,为解决夜间驾驶中可见度不足、强光照射等问题提供了一种创新性的解决方案。
背景技术:
1、驾驶环境中的视觉挑战:在夜间驾驶或遭遇变化的光照条件时,驾驶员常常面临来自对向车辆的强烈光线干扰。在低光环境中,人眼对强光的适应能力有限,突然的强光照射可能导致视觉暂时失效,包括短暂的失明和焦距丧失。这种情况下,驾驶员的视线受到严重干扰,增加了夜间行车的风险。频繁的晶状体和瞳孔调整,以适应不断变化的光照条件,也会导致眼部疲劳,从而影响驾驶员的反应速度和判断能力。
2、现有技术的局限性:
3、当前技术中,智能防眩目后视镜作为解决这一问题的方案之一,通过电光调节技术来减少来自后方车辆头灯的光线干扰。这种技术主要依赖于液晶或电致变色材料,这些材料在电流作用下能够改变其颜色或透光性。配备光线传感器的后视镜能够检测到后方车辆的灯光强度,并相应地触发电光调节材料,从而减少眩光。
4、然而,这种智能防眩目后视镜存在明显的局限性。其核心问题在于,后视镜只能基于后方车辆的整体灯光强度来调节亮度,缺乏对特定强光区域的精确调节能力。这意味着虽然眩光得到了一定程度的缓解,但同时也可能导致对周围环境,如其他车辆、行人、路况等的重要信息丧失,增加了潜在的安全风险。
5、技术改进需求:
6、因此,存在一个迫切需求,开发一种用于夜间驾驶的智能视觉辅助系统,该系统能够在保护驾驶员免受强光干扰的同时,不损失对其他重要环境信息的感知能力。该系统应能够精确地调节人视野前方位于显示屏上特定区域的亮度,而不是整体区域,从而提供更加安全和舒适的驾驶体验。
技术实现思路
1、本发明是通过采用以下技术方案实现的,按此目的设计的一种智能视觉辅助系统用于动态亮度调整的方法描述如下。
2、实现流程与步骤描述如下。
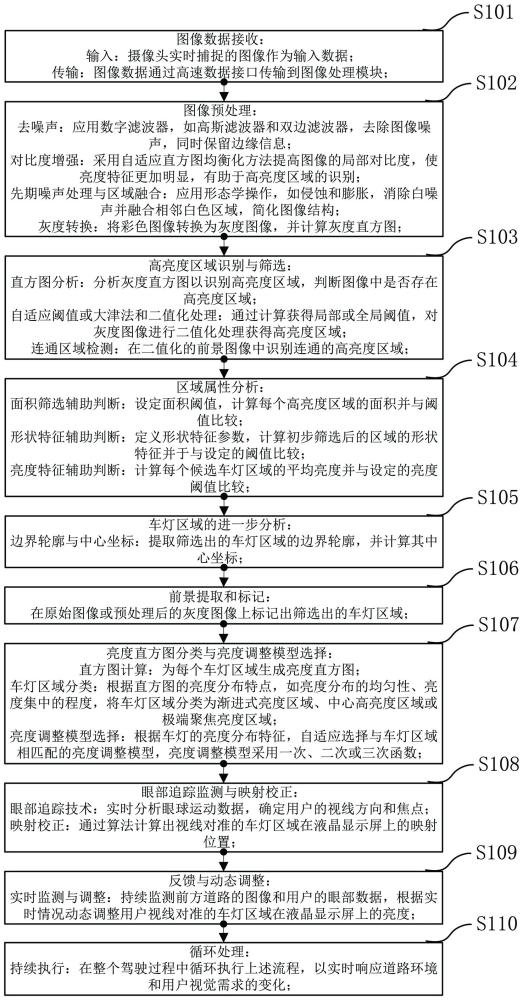
3、 (1)图像数据接收:
4、输入:摄像头实时捕捉的图像作为输入数据。
5、传输:图像数据通过高速数据接口传输到图像处理模块。
6、 (2)图像预处理:
7、去噪声:应用数字滤波器,如高斯滤波器和双边滤波器,去除图像噪声,同时保留边缘信息。
8、对比度增强:采用自适应直方图均衡化方法提高图像的局部对比度,使亮度特征更加明显,有助于高亮度区域的识别。
9、先期噪声处理与区域融合:应用形态学操作,如侵蚀和膨胀,消除白噪声并融合相邻白色区域,简化图像结构。
10、灰度转换:将彩色图像转换为灰度图像,并计算灰度直方图。
11、 (3)高亮度区域识别与筛选:
12、直方图分析:分析灰度直方图以识别高亮度区域,判断图像中是否存在高亮度区域。
13、自适应阈值或大津法和二值化处理:通过计算获得局部或者全局阈值,对灰度图像进行二值化处理获得高亮度区域即前景图像和低亮度区域即背景图像,以突出图像中的高亮度区域,这些区域可能包含车灯。
14、连通区域检测:在二值化的前景图像中识别连通的高亮度区域,这些区域可能是车灯或其他高亮度源。
15、 (4)区域属性分析:
16、计算每个高亮度区域的属性:如面积、形状、亮度等,以便于筛选可能的车灯区域。
17、面积筛选辅助判断:
18、面积阈值设定:设定一个基于实验数据的面积阈值,用于初步筛选潜在的车灯区域。
19、面积计算与初步筛选:对每个高亮度区域计算其面积,并与阈值比较,过滤掉面积过小的区域。
20、形状特征辅助判断:定义形状特征参数,如圆形度或椭圆形度。对初步筛选后的区域,计算其形状特征,并与预设阈值比较。在形状特征符合车灯特征的情况下,将其确认为候选车灯区域。
21、亮度特征辅助判断:亮度级别计算:计算每个候选车灯区域的平均亮度。
22、亮度级别筛选:对于平均亮度达到一定亮度水平的区域,将其标记为最终的车灯区域。
23、 (5)车灯区域的进一步分析:
24、边界轮廓与中心坐标:对每个筛选出的车灯区域,提取边界轮廓,并计算其中心坐标,为后续亮度调整提供参考。
25、 (6)前景提取和标记:
26、在原始图像或预处理后的灰度图像上,将筛选出的车灯区域特别标记出来,例如通过在车灯区域周围绘制边框或改变车灯区域的颜色。
27、 (7)亮度直方图分类与亮度调整模型选择:
28、直方图计算:为每个车灯区域生成亮度直方图。
29、车灯区域分类:根据直方图的亮度分布的特点,如亮度分布的均匀性、亮度集中的程度,将车灯区域分类为渐进式亮度区域、中心高亮度区域或极端聚焦亮度区域。
30、亮度调整模型选择:根据车灯的亮度分布特征,自适应选择与车灯区域相匹配的亮度调整模型,亮度调整模型采用一次、二次或三次函数。
31、 (8)眼部追踪监测与映射校正:
32、眼部追踪技术:实时分析眼球运动数据,确定用户的视线方向和焦点。通过算法计算出视线对准的车灯区域在液晶显示屏上的映射位置。
33、 (9)反馈与动态调整:
34、实时监测与调整:持续监测前方道路的图像和用户的眼部数据,根据实时情况动态调整用户视线对准的车灯区域在液晶显示屏上的亮度。
35、 (10)循环处理:
36、持续执行:在整个驾驶过程中循环执行上述流程,以实时响应道路环境和用户视觉需求的变化。
37、该方法通过精确调节显示屏上车灯区域的亮度,即用户视野中的车灯区域的亮度,而不是用户视野中整体区域的亮度,在保护驾驶员免受强光干扰的同时,不损失对周周围环境信息的感知能力。
38、所述液晶显示屏为透明的液晶显示屏,通过控制微电流,调节液晶显示屏上相应区域的亮度,使得调整策略能够根据用户视线的焦点和车灯区域的相对位置来适配。
39、自适应亮度调整方法描述如下。
40、技术实现细节:
41、亮度渐变调整:映射在液晶显示屏上的车灯区域通常为圆形或椭圆形,通过确定每个车灯区域的最大半径r来设计渐变亮度调整策略。
42、亮度测量与计算:对筛选出的车灯区域,计算其最高亮度lmax和边界轮廓的平均亮度ledge。
43、亮度动态调整算法:基于每个像素点亮度l和每个像素点到中心坐标的距离d的关系,设计不同的亮度调整模型,例如一次函数、二次函数、三次函数等。对显示屏上车灯区域内的每个像素点,计算其距离中心坐标的距离d,应用匹配的亮度调整模型,动态调整每个像素点的亮度。确保越靠近车灯区域中心坐标的亮度衰减量越大,越靠近车灯区域边界坐标的亮度衰减量越小。
44、 一次函数关系:适用于对渐进式亮度区域的调整。计算公式为 l = lpixel -(δl - ▽f1 * d),其中,lpixel为像素点的初始亮度,δl为最高亮度与边界轮廓的平均亮度之差,δl = lmax – ledge,▽f1表示线性变化梯度,▽f1= δl /r,适用于相对均匀的亮度变化场景,d为像素点距离中心坐标的距离,d ≤ r。
45、 二次函数关系:适用于对中心高亮度、边缘逐渐减弱区域的调整。计算公式为 l= lpixel - (δl - ▽f2 * d²),其中,lpixel为像素点的初始亮度,δl为最高亮度与边界轮廓的平均亮度之差,δl = lmax – ledge,▽f2表示二次变化梯度,▽f2= δl / r2,适用于中心聚焦的场景,d为像素点距离中心坐标的距离,d ≤ r。
46、 三次函数关系:适用于对极端聚焦或分散区域的调整。计算公式为 l = lpixel- (δl - ▽f3 * d³),其中,lpixel为像素点的初始亮度,δl为最高亮度与边界轮廓的平均亮度之差,δl = lmax – ledge,▽f3表示三次变化梯度,▽f3= δl / r3,适用于更强烈的中心聚焦的场景,d为像素点距离中心坐标的距离,d ≤ r。
47、亮度调整模型在实施过程中,根据实时监测到的眼部追踪数据动态选择最合适的模型,精确调整液晶显示屏对应位置的亮度,以优化用户视觉体验。
48、自适应亮度调整方法包括以下步骤:
49、(1)确定车灯区域的最大半径r:通过映射在液晶显示屏上的车灯区域形状,确定每个车灯区域的最大半径r。
50、 (2)亮度测量与计算:对筛选出的车灯区域进行亮度测量,计算每个车灯区域的最高亮度lmax ,边界轮廓的平均亮度ledge,最高亮度与边界轮廓的平均亮度之差:δl =lmax – ledge。
51、 (3)应用匹配的亮度调整模型计算对应的衰减系数▽f;
52、▽f1表示线性变化梯度,▽f1= δl /r;
53、▽f2表示二次变化梯度,▽f2= δl / r²;
54、▽f3表示三次变化梯度,▽f3= δl / r³。
55、 (4)亮度动态调整算法:
56、对于显示屏上车灯区域内的每个像素点,计算像素点距离中心坐标的距离d,应用匹配的亮度调整模型,动态调整每个像素点的亮度。
57、 一次函数关系:适用于对渐进式亮度区域的调整;计算公式为 l = lpixel -(δl - ▽f1 * d),其中,lpixel为像素点的初始亮度,d ≤ r。
58、 二次函数关系:适用于对中心高亮度、边缘逐渐减弱区域的调整;计算公式为 l= lpixel - (δl - ▽f2 * d²),其中,lpixel为像素点的初始亮度,d ≤ r。
59、 三次函数关系:适用于对极端聚焦或分散区域的调整;计算公式为 l = lpixel- (δl - ▽f3 * d³),其中,lpixel为像素点的初始亮度,lpixel为像素点的初始亮度,d≤ r。
60、这一流程确保在车灯区域内,亮度衰减系数根据亮度变化的剧烈程度来确定,亮度从中心到边缘实现平滑过渡。
61、一种智能视觉辅助系统用于动态亮度调整的系统,其特征在于,系统包括以下组件和功能:
62、摄像头模块:包括一个高分辨率微型摄像头,角度可调;用于实时捕捉用户视野内的图像。
63、图像数据接收模块:接收摄像头实时捕捉的图像作为输入数据。
64、通过高速数据接口将图像数据传输到图像处理模块。
65、图像处理模块:
66、包括:图像预处理模块,高亮度区域识别与筛选模块,区域属性分析模块,车灯区域的进一步分析模块,前景提取和标记模块,亮度直方图分类与亮度调整模型选择模块;图像处理模块配备先进的图像处理芯片,用于运行预处理和图像识别算法,实时分析图像亮度分布,定位高亮度区域坐标。
67、图像预处理模块:
68、去噪声:应用数字滤波器,如高斯滤波器和双边滤波器,去除图像噪声,同时保留边缘信息。
69、对比度增强:采用自适应直方图均衡化方法提高图像的局部对比度,使亮度特征更加明显。
70、先期噪声处理与区域融合:应用形态学操作,如侵蚀和膨胀,消除白噪声并融合相邻白色区域,简化图像结构。
71、灰度转换:将彩色图像转换为灰度图像,并计算灰度直方图。
72、高亮度区域识别与筛选模块:
73、直方图分析:分析灰度直方图以识别高亮度区域,判断图像中是否存在高亮度区域。
74、自适应阈值或大津法和二值化处理:通过计算获得局部或全局阈值,对灰度图像进行二值化处理获得高亮度区域。
75、连通区域检测:在二值化的前景图像中识别连通的高亮度区域。
76、区域属性分析模块:
77、面积筛选辅助判断:设定面积阈值,计算每个高亮度区域的面积并与阈值比较。
78、形状特征辅助判断:定义形状特征参数,计算初步筛选后的区域的形状特征并与设定的阈值比较。
79、亮度特征辅助判断:计算每个候选车灯区域的平均亮度并与设定的亮度阈值比较。
80、车灯区域的进一步分析模块:
81、边界轮廓与中心坐标:提取筛选出的车灯区域的边界轮廓,并计算其中心坐标。
82、前景提取和标记模块:在原始图像或预处理后的灰度图像上标记出筛选出的车灯区域。
83、亮度直方图分类模块:
84、直方图计算:为每个车灯区域生成亮度直方图。
85、车灯区域分类:根据直方图的亮度分布特点,将车灯区域分类为渐进式亮度区域、中心高亮度区域或极端聚焦亮度区域。
86、亮度调整模型选择:根据车灯的亮度分布特征,自适应选择与车灯区域相匹配的亮度调整模型,亮度调整模型采用一次、二次或三次函数。
87、眼部追踪模块:该模块包括多个红外传感器和一个迷你摄像头,用于实时监测用户瞳孔的位置和眼睛的运动;通过分析瞳孔反射的红外光信号来准确追踪眼球方向,从而确定用户的视线方向和焦点;通过空间变换算法计算出视线对准的特定区域在眼镜镜片上的映射位置。
88、校正逻辑模块:结合图像处理模块提供的高亮度区域位置数据和眼部追踪模块提供的眼部追踪数据,计算出需要调整亮度的精确区域;实时调整算法,以确保映射校正与用户视线的变化保持同步。
89、局部亮度调节模块:带有液晶显示屏的镜片或车前窗玻璃,液晶显示屏的亮度可根据需求进行调整。
90、反馈与动态调整模块:
91、实时监测与调整:持续监测前方道路的图像和用户的眼部数据,根据实时情况动态调整用户视线对准的车灯区域在液晶显示屏上的亮度。
92、循环处理模块:
93、持续执行:在整个驾驶过程中循环执行上述流程,以实时响应道路环境和用户视觉需求的变化。
94、微处理器:微处理器结合图像处理模块和眼部追踪模块的输入,精确调整液晶显示屏不同位置的亮度,实现对高亮度区域的有效抑制,同时保持用户的整体视野清晰。
95、驱动模块:用于控制局部亮度调节模块中的液晶显示屏。
96、无线通信模块:用于无线通信。
97、通过摄像头捕捉实时图像,结合去噪声、对比度增强和区域融合等预处理步骤,系统通过直方图分析、自适应阈值处理和连通区域检测识别高亮度区域,进一步通过面积、形状和亮度特征辅助判断高亮度区域是否为车灯区域;在对每个车灯区域的边界轮廓与中心坐标的分析后,采用前景提取标记这些车灯区域;同时,通过眼部追踪模块实时分析眼球运动数据,确定用户的视线方向和焦点,并通过空间变换算法计算出视线对准的特定区域在液晶显示屏上的映射位置;系统还包括自适应亮度调整方法,根据车灯区域的亮度分布特点动态匹配亮度调整模型;通过精准调节显示屏上特定区域的亮度,在防止强光干扰的同时,保持对周围环境信息的感知能力,提高夜间驾驶的安全性。
98、自适应亮度调整方法包括以下步骤:
99、(1)确定车灯区域的最大半径r:通过映射在液晶显示屏上的车灯区域形状,确定每个车灯区域的最大半径r。
100、 (2)亮度测量与计算:对筛选出的车灯区域进行亮度测量,计算每个车灯区域的最高亮度lmax ,边界轮廓的平均亮度ledge,最高亮度与边界轮廓的平均亮度之差:δl =lmax – ledge。
101、 (3)应用匹配的亮度调整模型计算对应的衰减系数▽f;
102、▽f1表示线性变化梯度,▽f1= δl /r;
103、▽f2表示二次变化梯度,▽f2= δl / r²;
104、▽f3表示三次变化梯度,▽f3= δl / r³。
105、 (4)亮度动态调整算法:
106、对于显示屏上车灯区域内的每个像素点,计算像素点距离中心坐标的距离d,应用匹配的亮度调整模型,动态调整每个像素点的亮度。
107、 一次函数关系:适用于对渐进式亮度区域的调整;计算公式为 l = lpixel -(δl - ▽f1 * d),其中,lpixel为像素点的初始亮度,d ≤ r。
108、 二次函数关系:适用于对中心高亮度、边缘逐渐减弱区域的调整;计算公式为 l= lpixel - (δl - ▽f2 * d²),其中,lpixel为像素点的初始亮度,d ≤ r。
109、 三次函数关系:适用于对极端聚焦或分散区域的调整;计算公式为 l = lpixel- (δl - ▽f3 * d³),其中,lpixel为像素点的初始亮度,lpixel为像素点的初始亮度,d≤ r。
110、这一流程确保在车灯区域内,亮度衰减系数根据亮度变化的剧烈程度来确定,亮度从中心到边缘实现平滑过渡。
- 还没有人留言评论。精彩留言会获得点赞!