一种行人干扰下车间两输入两输出可见光通信系统模型的构建方法
本发明涉及一种行人干扰下车间两输入两输出可见光通信系统模型的构建方法,属于可见光通信领域。
背景技术:
1、可见光通信作为下一代通信的关键技术,可应用于城市交通体系中的汽车照明,利用汽车前照灯发光,通过可见光波段的光源作为信息的载体,无需有线信道作为传输介质,是一种在空气中直接传输光信号的通信方式。
2、车间可见光通信系统应用于城市交通体系中的汽车照明时,由于行人交通是城市交通体系中非常重要的一部分,因此行人干扰对车间可见光通信系统的影响不可忽视。
3、并且,由于车与车之间可见光通信的实验设备较为昂贵,所以对于车与车之间可见光通信的方案验证以及性能测试大多是通过建立仿真模型实现的。但是现有的研究中并没有考虑室外可见光通信所存在的障碍干扰,也没有建立障碍干扰可见光通信系统模型,使得车与车之间可见光通信方案的验证以及性能的测试不可靠。
4、因此,如何对行人干扰车间两输入两输出可见光通信系统进行建模,以及如何减少行人干扰对可见光通信系统的影响,是车与车之间可见光通信技术进一步发展的重要研究。
技术实现思路
1、本发明为解决上述技术问题,提供一种行人干扰下车间两输入两输出可见光通信系统模型的构建方法,通过研究可见光通信链路,建立行人干扰下车间两输入两输出可见光通信的实际模型,能够改善障碍干扰存在时车间两输入两输出可见光通信系统性能,为以后的技术研究提供了可靠的理论依据和实验指导。
2、为解决上述技术问题,本发明所采用的技术方案是:
3、一种行人干扰下车间两输入两输出可见光通信系统模型的构建方法,采用两个市场加权灯束模型的前照灯作为发射器,两个光电探测器作为接收器,引入了行人干扰下可见光通信模型和解决此行人干扰所提出的改进合并方式,基于真实的交通环境特征进行模型的建立,从而使系统模型实验数据更加真实;具体包括以下步骤:
4、步骤1:汽车前照灯模型的建立;
5、步骤2:行人干扰下视距链路分析;
6、步骤3:行人干扰下非视距链路分析;
7、步骤4:系统噪声分析;
8、步骤5:合并方式分析。
9、本发明技术方案的进一步改进在于:所述步骤1汽车前照灯光照强度分布是根据市场加权前照灯束模型得到的,光照强度表达式为:
10、it(α,β)(1)
11、其中,α和β为汽车前照灯出射光线方向与汽车前照灯灯轴方向的水平夹角和垂直夹角;
12、汽车前照灯出射光线在任意被照射点表面的照度为:
13、
14、其中,φ为光通量;s为路面相对应的反射面积;ω为光线立体角;r为光线出射点与被照射点的直线距离;θ为汽车前照灯出射光线与被照射平面法线的夹角。
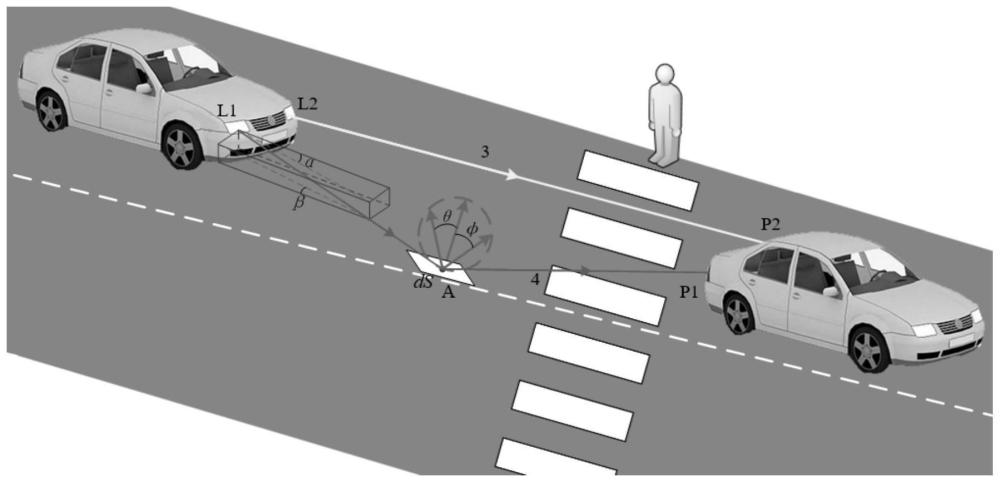
15、本发明技术方案的进一步改进在于:行人于斑马线处沿直线移动,模型通信时汽车的前照灯一(l1)和前照灯二(l2)发射到接收汽车的光电探测器一(p1)和光电探测器二(p2)的光线为视距链路(3);在行人干扰下,视距链路会受到遮挡干扰;
16、所述步骤2具体包括如下步骤:
17、步骤2.1:第i个前照灯到第j个光电探测器的视距链路由行人干扰所导致的受光面积ar-ij的表达式为:
18、
19、其中,表示i与j相同时的受光面积,表示i与j不同时的受光面积,且当i为1时,所建立的坐标轴以l1为坐标原点,当i为2时,所建立的坐标轴以l2为坐标原点。
20、步骤2.2:上一步骤所述受光面积的表达式分别为:
21、
22、其中,行人在坐标系上的坐标为(da,ha),其中,r表示光电探测器的半径,hp为光电探测器的圆心到遮挡阴影的距离(过渡变量)。d表示行人侧身宽度,又称厚度。w表示行人正身宽度,又称宽度。dv表示两车之间的纵向距离。
23、
24、其中,dpd表示两个光电探测器之间的距离。
25、步骤2.3:已知ar-ij的表达式,行人干扰影响下通过视距链路接收的光功率为:
26、
27、其中,为视距链路下第i个前照灯照射到第j个光电探测器产生的功率;ar-ij为第i个前照灯到第j个光电探测器的视距链路所导致的受光面积;ler为前照灯的发光效能;θij为第i个前照灯和第j个光电探测器组成的视距链路与光电探测器表面法线的夹角;dij为第i个前照灯到第j个光电探测器之间的直线距离。
28、本发明技术方案的进一步改进在于:汽车的前照灯一(l1)与前照灯二(l2)发射光线经过路面反射进入接受汽车光电探测器一(p1)与光电探测器二(p2)的光线为系统模型的非视距链路(4),将光束路面反射模式视为朗伯模式,行人于斑马线处沿直线移动,行人干扰会影响到非视距链路;
29、所述步骤3具体包括如下步骤:
30、步骤3.1:非视距链路光束在路面反射模式被认为是朗伯轮廓,假设朗伯指数m=1,反射辐射强度为:
31、
32、其中,ρ为漫反射率,φ是散射光的极角;
33、步骤3.2:行人遮挡可见光通信系统时,行人遮挡角度γ表达式为:
34、
35、其中,行人遮挡临界光与前照灯灯轴方向的夹角和行人在坐标系上的坐标为(da,ha)。d表示行人侧身宽度,又称厚度;w表示行人正身宽度,又称宽度。dv表示两车之间的纵向距离。
36、步骤3.3:行人干扰下的可见光通信系统非视距链路接收光功率为:
37、
38、其中,为遮挡角度为γ的第i个前照灯发出光线经非视距链路到达第j个光电探测器的发光强度;此时当i为1时,所建立的坐标轴以l1为坐标原点,当i为2时,所建立的坐标轴以l2为坐标原点;ar和h分别为光电探测器的受光面积和距离地面的高度;dij为第i个前照灯发射光线到第j个光电探测器的非视距链路路面反射点a和光电探测器的垂直投影之间的直接路径;θ为路面法线与入射光线的夹角,ρ为路面漫反射率,φij为第i个前照灯发射光线到第j个光电探测器的非视距链路路面法线与路面反射光线夹角,ψij为第i个前照灯发射光线到第j个光电探测器的非视距链路的反射光线与光电探测器平面法线的夹角,ds为入射光线反射到路面的面积,dt为前照灯到反射点a的最短距离;
39、步骤3.4:行人干扰下第i个前照灯发射光线到第j个光电探测器的非视距链路接受光功率表示为:
40、
41、其中,s为非视距链路在路面上的反射区域,反射点a处于反射区域s内。
42、本发明技术方案的进一步改进在于:本模型用于白天车与车之间两输入两输出可见光通信系统性能的分析,因此环境光会对信号的传输造成较大的影响;在有环境光的条件下,散粒噪声、码间干扰噪声以及加性高斯白噪声表示的热噪声会对信号的传输造成较大的影响;
43、所述步骤4包括以下步骤:
44、步骤4.1:散粒噪声对系统模型接收信号的干扰,计算式如下:
45、
46、是第i个前照灯发射光线到第j个光电探测器的散射噪声的方差;q是电子电荷;r是光电探测器的响应速度;b是系统带宽;ibg是接收到的背景噪声电流;i2是背景噪声的噪声带宽系数;
47、步骤4.2:码间干扰噪声计算式如下:
48、
49、其中,为第j个光电探测器码间干扰噪声的方差;
50、步骤4.3:加性高斯白噪声表示的热噪声计算式如下:
51、
52、其中,为热噪声的方差;k为玻尔兹曼常数;tk为绝对温度;g为开环电压增益;γ为晶体管信道噪声因子;gm为晶体管反电导率;η为单位面积光电探测器的固定电容;i3为热噪声的晶体管信道噪声电流。
53、本发明技术方案的进一步改进在于:所述步骤5包括以下步骤:
54、步骤5.1:采用二进制开关键控调制技术以光电探测器直接检测技术进行信息的传递,采集信号的信噪比定义为:
55、
56、其中,snrij为第i个前照灯到第j个光电探测器的信噪比;
57、步骤5.2:第i个前照灯发射经视距链路和非视距链路入射到第j个光电探测器的光线链路记为link-ij,此模型包括四条链路分别为link11、link21、link12和link12。则对四条链路信号的信噪比进行等增益合并,计算式如下:
58、snregc=0.5·(snr11+snr21)+0.5·(snr12+snr22) (15)
59、snregc为行人干扰下可见光通信系统经过等增益合并处理后的信噪比;
60、步骤5.3:对四条链路信号的信噪比进行最大比合并,计算式如下:
61、
62、snrmrc为行人干扰下可见光通信系统经过最大比合并处理后的信噪比;
63、步骤5.4:针对行人干扰对可见光通信系统的影响,提出一种改进的最大比合并方式,计算式如下:
64、
65、snrnew为行人干扰下可见光通信系统经过改进的最大比合并方式处理后的信噪比,snrnew为系统性能最优的信噪比;
66、步骤5.5:行人干扰下可见光通信系统误码率计算式如下:
67、
68、其中,q(x)为用于计算标准高斯分布的尾部概率的函数。
69、由于采用了上述技术方案,本发明取得的技术进步是:
70、本发明基于行人位置所产生的光电探测器接受光功率和解决此干扰场景的改进合并方式,基于真实的交通环境进行模型的建立,提高了行人干扰下车间两输入两输出可见光通信系统模型的实用性,对可见光通信出现障碍干扰提供了实验指导。
71、本发明实现了对车间两输入两输出可见光通信系统模型存在障碍干扰的研究,进而分析并改善障碍干扰存在时车间两输入两输出可见光通信系统性能,为以后的技术研究提供了可靠的理论依据和实验指导。
- 还没有人留言评论。精彩留言会获得点赞!