网联无人机的控制方法、装置、设备及存储介质与流程
本技术涉及无人机,尤其涉及一种网联无人机的控制方法、装置、设备及存储介质。
背景技术:
1、网联无人机是对传统无人机的升级,相较于传统无人机,网联无人机具备抗干扰、远程操控、超视距飞行以及可监管等突出优势,是未来无人机发展的必然趋势。网联无人机依托低空网络实现网联无人机与网联无人机云平台之间,或网联无人机与无人机系统地面站之间,的数据实时交互。因此,执行网联无人机的应用离不开低空网络的资源支持,且在很大程度上,区域内的低空网络的信号覆盖范围将决定网联无人机飞行的有效空间范围。现阶段,可以采取以下两种方式提供低空网络:1)建设低空覆盖专网,即专网;2)利用现有地面网络,即现网。其中,第一种方式(专网)存在无线电频段不明确、成本高、耗时长等诸多问题,还不足以成为当前支撑网联无人机开展应用的主选方案;第二种方式(现网),服务的主体是地面用户,因此覆盖低空的网络信号并不稳定。
2、相关技术中,针对现有地面网络支持网联无人机执行应用的不足,采用双链路通信,在低空有网络信号覆盖时,网联无人机回传业务数据至网联无人机云平台,用户端与网联无人机云平台交互获得该业务数据;而在低空没有网络信号覆盖时,基于点对点通信,网联无人机回传业务数据至无人机系统地面站,由于无人机系统地面站无法与用户端交互,需要通过人工将回传至无人机系统地面站的业务数据拷贝到用户端。但该方式易导致业务数据的完整性得不到有效保障。
技术实现思路
1、本技术实施例提供一种网联无人机的控制方法、装置、设备及存储介质,用以在基于现有地面网络支持网联无人机执行应用时,确保业务数据的完整性。
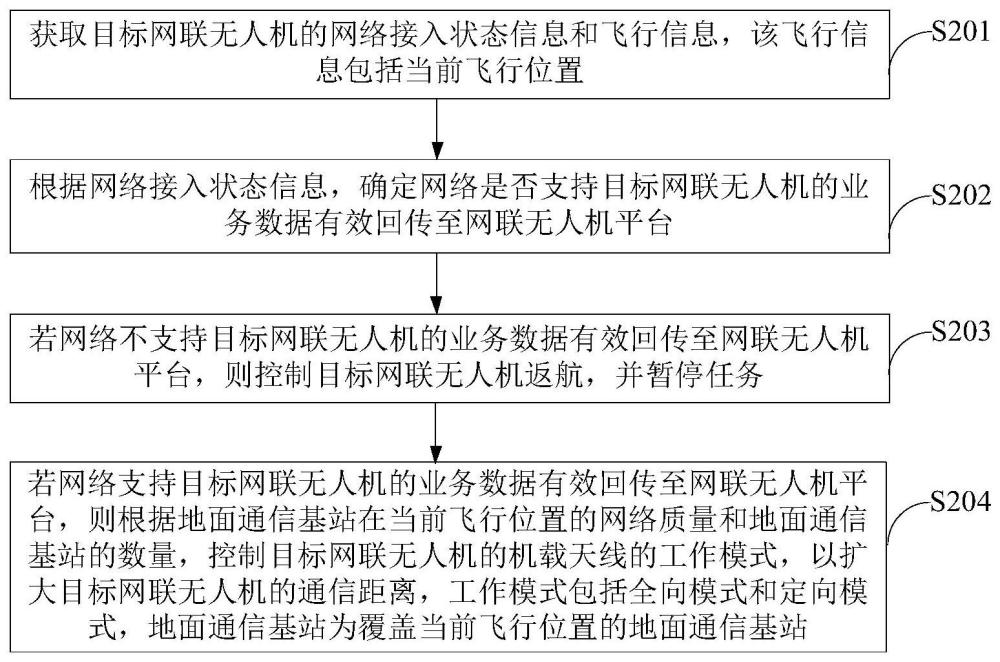
2、第一方面,本技术实施例提供一种网联无人机的控制方法,应用于网联无人机云平台,该控制方法包括:获取目标网联无人机的网络接入状态信息和飞行信息,该飞行信息包括当前飞行位置;根据网络接入状态信息,确定网络是否支持目标网联无人机的业务数据有效回传至网联无人机平台;若网络不支持目标网联无人机的业务数据有效回传至网联无人机平台,则控制目标网联无人机返航,并暂停任务;若网络支持目标网联无人机的业务数据有效回传至网联无人机平台,则根据地面通信基站在当前飞行位置的网络质量和地面通信基站的数量,控制目标网联无人机的机载天线的工作模式,以扩大目标网联无人机的通信距离,工作模式包括全向模式和定向模式,地面通信基站为覆盖当前飞行位置的地面通信基站。
3、一种可能的实现方式中,根据地面通信基站在当前飞行位置的网络质量和地面通信基站的数量,控制目标网联无人机的机载天线的工作模式,包括:若地面通信基站的数量为至少两个,则控制目标网联无人机接入目标地面通信基站,并控制目标网联无人机的机载天线的工作模式为全向模式,在至少两个地面通信基站中,目标地面通信基站在当前飞行位置的网络质量最好的;若地面通信基站的数量为一个,则控制目标网联无人机的机载天线的工作模式由全向模式切换到定向模式,并调整机载天线的定向波束方向与地面通信基站的天线波束方向对齐。
4、一种可能的实现方式中,控制目标网联无人机接入目标地面通信基站之后,还包括:控制目标网联无人机的机载天线的工作模式由全向模式切换到定向模式,并调整机载天线的定向波束方向与目标地面通信基站的天线波束方向对齐。
5、一种可能的实现方式中,调整机载天线的定向波束方向与天线波束方向对齐,包括:获取地面通信基站的位置信息和天线角度;根据位置信息和当前飞行位置,确定地面通信基站和目标网联无人机之间的相对位置关系;根据相对位置关系和天线角度,调整机载天线的定向波束方向,以与地面通信基站的天线波束方向对齐。
6、一种可能的实现方式中,该控制方法还包括:若目标网联无人机无法回传业务数据至网联无人机平台,则暂停业务,并在目标网联无人机返回至有效回传区域时,根据地面通信基站的数量控制目标网联无人机的机载天线的工作模式。
7、一种可能的实现方式中,飞行信息还包括飞行高度,覆盖当前飞行位置的地面通信基站是通过以下方式确定的:根据当前飞行位置和飞行高度,得到目标网联无人机的地面位置信息;根据地面位置信息信息,确定目标网联无人机和地面通信基站之间的相对距离;确定相对距离小于距离阈值的地面通信基站为覆盖当前飞行位置的地面通信基站。
8、一种可能的实现方式中,网络接入状态信息包括接收参考信号功率和网络信干噪比,根据网络接入状态信息,确定网络是否支持目标网联无人机的业务数据有效回传至网联无人机平台,包括:若接收参考信号功率在预设功率范围,且网络信干噪比在预设比值范围,则确定网络支持目标网联无人机的业务数据有效回传至网联无人机平台;若接收参考信号功率不在预设功率范围,或,网络信干噪比不在预设比值范围,则确定网络不支持目标网联无人机的业务数据有效回传至网联无人机平台。
9、第二方面,本技术实施例提供一种网联无人机的控制装置,应用于网联无人机云平台,该控制装置包括:获取模块,用于获取目标网联无人机的网络接入状态信息和飞行信息,该飞行信息包括当前飞行位置;确定模块,用于根据网络接入状态信息,确定网络是否支持目标网联无人机的业务数据有效回传至网联无人机平台;第一控制模块,用于在网络不支持目标网联无人机的业务数据有效回传至网联无人机平台时,控制目标网联无人机返航,并暂停任务;第二控制模块,用于在网络支持目标网联无人机的业务数据有效回传至网联无人机平台时,根据地面通信基站在当前飞行位置的网络质量和地面通信基站的数量,控制目标网联无人机的机载天线的工作模式,以扩大目标网联无人机的通信距离,工作模式包括全向模式和定向模式,地面通信基站为覆盖当前飞行位置的地面通信基站。
10、一种可能的实现方式中,第二控制模块具体用于:若地面通信基站的数量为至少两个,则控制目标网联无人机接入目标地面通信基站,并控制目标网联无人机的机载天线的工作模式为全向模式,在至少两个地面通信基站中,目标地面通信基站在当前飞行位置的网络质量最好的;若地面通信基站的数量为一个,则控制目标网联无人机的机载天线的工作模式由全向模式切换到定向模式,并调整机载天线的定向波束方向与地面通信基站的天线波束方向对齐。
11、一种可能的实现方式中,第二控制模块还可以用于:控制目标网联无人机的机载天线的工作模式由全向模式切换到定向模式,并调整机载天线的定向波束方向与目标地面通信基站的天线波束方向对齐。
12、一种可能的实现方式中,第二控制模块还可以用于:获取地面通信基站的位置信息和天线角度;根据位置信息和当前飞行位置,确定地面通信基站和目标网联无人机之间的相对位置关系;根据相对位置关系和天线角度,调整机载天线的定向波束方向,以与地面通信基站的天线波束方向对齐。
13、一种可能的实现方式中,第二控制模块还可以用于:若目标网联无人机无法回传业务数据至网联无人机平台,则暂停业务,并在目标网联无人机返回至有效回传区域时,根据地面通信基站的数量控制目标网联无人机的机载天线的工作模式。
14、一种可能的实现方式中,飞行信息还包括飞行高度,覆盖当前飞行位置的地面通信基站是通过以下方式确定的:根据当前飞行位置和飞行高度,得到目标网联无人机的地面位置信息;根据地面位置信息,确定目标网联无人机和地面通信基站之间的相对距离;确定相对距离小于距离阈值的地面通信基站为覆盖当前飞行位置的地面通信基站。
15、一种可能的实现方式中,网络接入状态信息包括接收参考信号功率和网络信干噪比,确定模块具体用于:若接收参考信号功率在预设功率范围,且网络信干噪比在预设比值范围,则确定网络支持目标网联无人机的业务数据有效回传至网联无人机平台;若接收参考信号功率不在预设功率范围,或,网络信干噪比不在预设比值范围,则确定网络不支持目标网联无人机的业务数据有效回传至网联无人机平台。
16、第三方面,本技术实施例提供一种电子设备,包括:
17、至少一个处理器;
18、以及与至少一个处理器通信连接的存储器;
19、其中,存储器用于存储计算机执行指令,该计算机执行指令被至少一个处理器执行时,以实现第一方面提供的网联无人机的控制方法。
20、第四方面,本技术实施例提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,该计算机执行指令被处理器执行,以实现第一方面提供的网联无人机的控制方法。
21、第五方面,本技术实施例提供一种程序产品,该程序产品包含计算机执行指令。当计算机执行指令被执行,以实现第一方面提供的网联无人机的控制方法。
22、本技术提供的网联无人机的控制方法、装置、设备及存储介质,通过获取目标网联无人机的网络接入状态信息和包括当前飞行位置的飞行信息,并根据网络接入状态信息,确定网络是否支持目标网联无人机的业务数据有效回传至网联无人机平台,在网络不支持目标网联无人机的业务数据有效回传至网联无人机平台时,控制目标网联无人机返航,并暂停任务,在网络支持目标网联无人机的业务数据有效回传至网联无人机平台,根据地面通信基站在当前飞行位置的网络质量和地面通信基站的数量,控制目标网联无人机的机载天线的工作模式,以扩大目标网联无人机的通信距离,并确保业务数据的完整性,提升网联无人机的整体表现。
- 还没有人留言评论。精彩留言会获得点赞!