基于数据抑制弧的Petri网在攻击下的监督控制方法
本发明属于计算机和通信,具体涉及一种基于数据抑制弧的petri网在攻击下的监督控制方法。
背景技术:
1、随着计算机技术和通信技术的迅猛发展,人们对各种工程系统和计算机设备的需求已不仅仅局限于功能的扩充,而是更加关注信息系统与物理设备的融合、系统资源的合理分配以及系统性能的优化。在此需求的引导下,信息物理系统(cps,cyber physicalsystem)应运而生,受到了世界各国的关注与重视。cps主要由受控对象、传感器、执行器、监控器以及通信网络组成。其中,通信网络的使用虽然使得cps各个物理组件都具有了信息处理和通信的能力,但同时也增加了cps应对网络攻击的脆弱性。攻击者可能会入侵传感器、执行器等,破坏数据收集过程、干扰监控器发出的控制指令,进而影响受控物理系统。因此,确保cps在攻击下的安全显得尤为重要,并成为近年来各国学者们的研究热点。
2、离散事件系统是由异步、突发的事件驱动状态演化的一类动态系统,具有不连续性、随机性、层次型和动态性等特点。因此,在离散事件系统框架下,可以更加关注上层的逻辑行为来研究信息物理系统的在攻击下的监督控制问题。监督控制理论的目的是设计一个符合控制需求的控制器,有三个重要的标准:行为许可性、结构复杂性和计算复杂性。petri网(佩氏网)作为对离散事件系统建模、分析、验证与仿真的重要工具之一,可以很容易地描述系统中流程和组件的顺序并发、冲突和同步关系,经常被用于研究离散事件系统的监督控制问题。但是,所得控制器结构的数量会随着网规模的增加而呈现出指数性的增长,导致结构复杂。
3、因此,如何构建一个更优的控制器来对离散事件系统在攻击下进行监督控制成为亟待解决的技术问题。
技术实现思路
1、为了解决现有技术中所存在的上述问题,本发明提供了一种基于数据抑制弧的petri网在攻击下的监督控制方法。
2、本发明要解决的技术问题通过以下技术方案实现:
3、第一方面,本发明提供了一种基于数据抑制弧的petri网在攻击下的监督控制方法,方法包括:
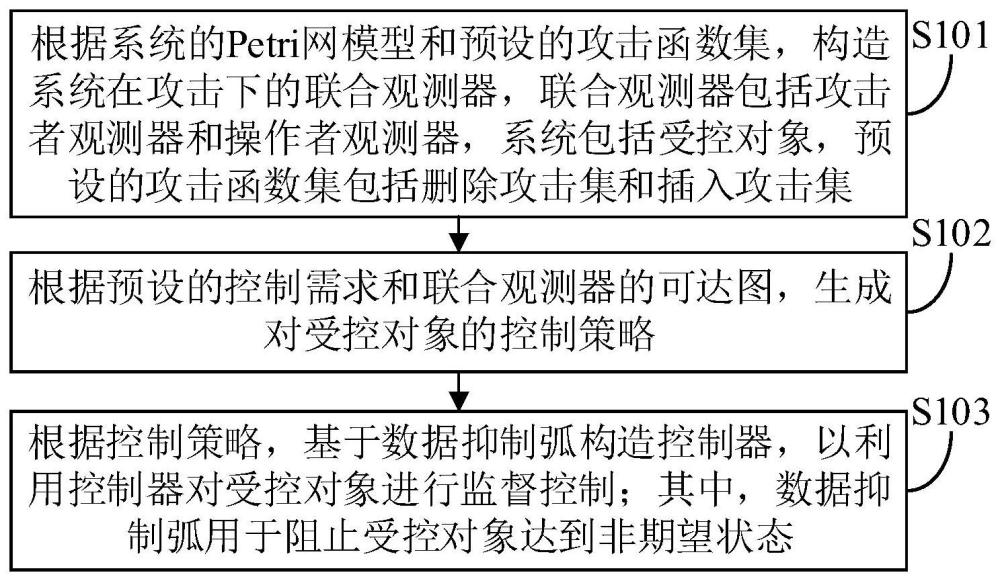
4、根据系统的petri网模型和预设的攻击函数集,构造所述系统在攻击下的联合观测器;所述联合观测器包括攻击者观测器和操作者观测器;所述系统包括受控对象;所述预设的攻击函数集包括删除攻击集和插入攻击集;
5、根据预设的控制需求和所述联合观测器的可达图,生成对所述受控对象的控制策略;
6、根据所述控制策略,基于数据抑制弧构造控制器,以利用所述控制器对所述受控对象进行监督控制;其中,所述数据抑制弧用于阻止所述受控对象达到非期望状态。
7、可选地,所述攻击者观测器的构造方式包括:
8、构造初始攻击者观测器;所述初始攻击者观测器为四元组n初att=(p初,t初att,pre初att,post初att);
9、其中,p初表示第一初始库所集,t初att表示第一初始变迁集,pre初att表示所述初始攻击者观测器的前置关联函数,post初att表示所述初始攻击者观测器的后置关联函数;所述前置关联函数用于统计从库所集到变迁集的各个弧的权重;所述后置关联函数用于统计从变迁集到库所集的各个弧的权重;
10、基于所述预设的攻击函数集,在t初att中增加属于所述删除攻击集的删除变迁和属于所述插入攻击集的插入变迁,在pre初att和post初att中增加与所述删除变迁关联的弧的权重,得到所述攻击者观测器;所述攻击者观测器为四元组natt=(p,tatt,preatt,postatt);
11、其中,p表示第一库所集,tatt表示第一变迁集,preatt表示所述攻击者观测器的前置关联函数,postatt表示所述攻击者观测器的后置关联函数。
12、可选地,所述操作者观测器的构造方式包括:
13、构造初始操作者观测器;所述初始操作者观测器为四元组
14、其中,表示第二初始库所集,t初oper表示第二初始变迁集,pre初oper表示所述初始操作者观测器的前置关联函数,post初oper表示所述初始操作者观测器的后置关联函数;
15、基于所述预设的攻击函数集,在t初oper中增加属于所述删除攻击集的删除变迁和属于所述插入攻击集的插入变迁,在pre初oper和post初oper中增加与所述插入变迁关联的弧的权重,得到所述操作者观测器;所述操作者观测器为四元组
16、其中,表示第二库所集,toper表示第二变迁集,preoper表示所述操作者观测器的前置关联函数,postoper表示所述操作者观测器的后置关联函数。
17、可选地,所述联合观测器为四元组nj=(pj,tj,prej,postj);
18、其中,
19、
20、
21、其中,prej是所述联合观测器的前置关联函数,postj是所述联合观测器的后置关联函数,preatt(p,tatt)是所述攻击者观测器的前置关联函数,是所述操作者观测器的前置关联函数,postatt(p,tatt)是所述攻击者观测器的后置关联函数,是所述操作者观测器的后置关联函数;p表示所述第一库所集,表示所述第二库所集,pj包括所述第一库所集和所述第二库所集,tatt是所述第一变迁集中的变迁,toper是所述第二变迁集中的变迁,tj包括所述第一变迁集和所述第二变迁集。
22、可选地,所述根据预设的控制需求和所述联合观测器的可达图,生成对所述受控对象的控制策略,包括:
23、确定所述联合观测器的可达图;
24、根据所述控制需求,生成所述可达图的各个状态标识;其中,不同状态标识标识着所述联合观测器的不同状态;
25、确定所述各个状态标识中的临界状态标识,根据确定结果生成对所述受控对象的所述控制策略;所述临界状态标识用于表征所述联合观测器被禁止达到的状态。
26、可选地,所述根据所述控制策略,基于数据抑制弧构造控制器,以利用所述控制器对所述受控对象进行监督控制,包括:
27、根据所述控制策略,确定临界状态参数;
28、将所述临界状态参数代入预先构建的控制器优化模型中进行求解,得到求解结果,并根据所述求解结果构造控制器,以利用所述控制器对所述受控对象进行监督控制;
29、其中,所述求解结果包括:a、β和l;a为用于得到所述数据抑制弧的整数集合;β用于确定所述控制器的控制库所的结构,l用于确定所述控制库所的前置变迁和后置变迁;
30、所述控制器优化模型是以一组a、β和l为求解参数,并以最小化β为优化目标的整数线性规划问题模型。
31、第二方面,本发明提供了一种基于数据抑制弧的petri网在攻击下的监督控制装置,装置包括:
32、联合观测器构造模块,用于根据系统的petri网模型和预设的攻击函数集,构造所述系统在攻击下的联合观测器;所述联合观测器包括攻击者观测器和操作者观测器;所述系统包括受控对象;所述预设的攻击函数集包括删除攻击集和插入攻击集;
33、控制策略生成模块,用于根据预设的控制需求和所述联合观测器的可达图,生成对所述受控对象的控制策略;
34、控制器构造模块,用于根据所述控制策略,基于数据抑制弧构造控制器,以利用所述控制器对所述受控对象进行监督控制;其中,所述数据抑制弧用于阻止所述受控对象达到非期望状态。
35、可选地,所述攻击者观测器的构造方式包括:
36、构造初始攻击者观测器;所述初始攻击者观测器为四元组n初att=(p初,t初att,pre初att,post初att);
37、其中,p初表示第一初始库所集,t初att表示第一初始变迁集,pre初att表示所述初始攻击者观测器的前置关联函数,post初att表示所述初始攻击者观测器的后置关联函数;所述前置关联函数用于统计从库所集到变迁集的各个弧的权重;所述后置关联函数用于统计从变迁集到库所集的各个弧的权重;
38、基于所述预设的攻击函数集,在t初att中增加属于所述删除攻击集的删除变迁和属于所述插入攻击集的插入变迁,在pre初att和post初att中增加与所述删除变迁关联的弧的权重,得到所述攻击者观测器;所述攻击者观测器为四元组natt=(p,tatt,preatt,postatt);
39、其中,p表示第一库所集,tatt表示第一变迁集,preatt表示所述攻击者观测器的前置关联函数,postatt表示所述攻击者观测器的后置关联函数。
40、可选地,所述操作者观测器的构造方式包括:
41、构造初始操作者观测器;所述初始操作者观测器为四元组
42、其中,表示第二初始库所集,t初oper表示第二初始变迁集,pre初oper表示所述初始操作者观测器的前置关联函数,post初oper表示所述初始操作者观测器的后置关联函数;
43、基于所述预设的攻击函数集,在t初oper中增加属于所述删除攻击集的删除变迁和属于所述插入攻击集的插入变迁,在pre初oper和post初oper中增加与所述插入变迁关联的弧的权重,得到所述操作者观测器;所述操作者观测器为四元组
44、其中,表示第二库所集,toper表示第二变迁集,preoper表示所述操作者观测器的前置关联函数,postoper表示所述操作者观测器的后置关联函数。
45、可选地,所述联合观测器为四元组nj=(pj,tj,prej,postj);
46、其中,
47、
48、
49、其中,prej是所述联合观测器的前置关联函数,postj是所述联合观测器的后置关联函数,preatt(p,tatt)是所述攻击者观测器的前置关联函数,是所述操作者观测器的前置关联函数,postatt(p,tatt)是所述攻击者观测器的后置关联函数,是所述操作者观测器的后置关联函数;p表示所述第一库所集,表示所述第二库所集,pj包括所述第一库所集和所述第二库所集,tatt是所述第一变迁集中的变迁,toper是所述第二变迁集中的变迁,tj包括所述第一变迁集和所述第二变迁集。
50、可选地,所述控制策略生成模块具体用于,
51、确定所述联合观测器的可达图;
52、根据所述控制需求,生成所述可达图的各个状态标识;其中,不同状态标识标识着所述联合观测器的不同状态;
53、确定所述各个状态标识中的临界状态标识,根据确定结果生成对所述受控对象的所述控制策略;所述临界状态标识用于表征所述联合观测器被禁止达到的状态。
54、可选地,所述控制器构造模块具体用于,
55、根据所述控制策略,确定临界状态参数;
56、将所述临界状态参数代入预先构建的控制器优化模型中进行求解,得到求解结果,并根据所述求解结果构造控制器,以利用所述控制器对所述受控对象进行监督控制;
57、其中,所述求解结果包括:a、β和l;a为用于得到所述数据抑制弧的整数集合;β用于确定所述控制器的控制库所的结构,l用于确定所述控制库所的前置变迁和后置变迁;
58、所述控制器优化模型是以一组a、β和l为求解参数,并以最小化β为优化目标的整数线性规划问题模型。
59、本发明提供的一种基于数据抑制弧的petri网在攻击下的监督控制方法,通过根据系统的petri网模型和预设的攻击函数集,构造系统在攻击下的联合观测器,联合观测器包括攻击者观测器和操作者观测器。系统包括受控对象,预设的攻击函数集包括删除攻击集和插入攻击集。根据预设的控制需求和联合观测器的可达图,生成对受控对象的控制策略。根据控制策略,基于数据抑制弧构造控制器,以利用控制器对受控对象进行监督控制,其中,数据抑制弧用于阻止受控对象达到非期望状态。通过构造包括攻击者观测器和操作者观测器的联合观测器的可达图能够直接快速地得到系统在攻击下的控制策略。通过本方案中根据控制策略并基于数据抑制弧构造的控制器,相较于现有技术中的控制器,结构更加简化,且行为许可性也得到了很大的提升。
60、以下将结合附图及对本发明做进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!