基于分布式协同资源管理的实时定位方法和装置与流程
本发明涉及无线网络定位,具体涉及基于分布式协同资源管理的实时定位方法。
背景技术:
1、目前在室内无线定位网络中被广泛应用的技术主要包括wi-fi、蓝牙、射频识别(radio frequency identification,rfid)、zigbee和超宽带(ultra wide band,uwb)等。典型的无线定位网络包含两种节点:位置已知的锚节点和待测的代理节点。其中,代理节点的位置可以由自身与其他多个节点的测量信息确定。在现有的定位技术中,到达时间(timeof arrival,toa)、到达时间差(time difference of arrival,tdoa)、到达角(angle ofarrival,aoa)或接收信号强度指示(received signal strength indicator,rssi)等测量信息都可以用于确定代理节点的位置。
2、传统的无线网络定位通常是利用非协同定位的方式定位代理节点,而非协同定位指的是代理节点的位置仅由代理节点与锚节点之间的测量信息确定,并不会使用代理节点之间的测量信息,如图1所示。非协同定位在锚节点分布均匀且数量充足时,可以达到不错的定位精度。但是当代理节点处在锚节点覆盖范围外(边缘),非协同定位技术便无法准确定位代理节点的位置。为了实现高精度定位,传统方式是提高锚节点的功率或部署密度,而这两种方法在成本和复杂度受限的情况下都不切实际。
3、现有的一个合适的替代方案就是协同定位,在协同定位中,代理节点能够确定彼此之间的距离等测量信息,并用于提升定位精度,尤其是在锚节点分布不足的区域。例如,在图2中,由于每个代理节点只在单个锚节点的覆盖范围内,它们仅仅依靠临近的锚节点无法获得自身位置,但是如果任意两个代理节点之间可以协同的话,便都可以确定自身位置。
4、但是,在协同定位网络中大量终端设备的接入会使得带宽资源愈发受限,且单个终端设备的总能量有限。以基于测距的定位技术为例,测距精度主要受到测距信号的带宽以及功率影响。因此对于一些资源受限的无线定位网络,按照网络拓扑结构以及节点之间的信道环境合理管理有限的可用资源,能够在提升定位精度的同时,延长无线定位网络的生命周期。
5、公开号为cn113597008a的专利公开了涉及一种基于深度确定性策略梯度(deepdeterministic policy gradient,ddpg)的无线定位网络的资源优化方法,该发明利用的是全局speb作为目标函数完成资源的优化调度,其需要使用到全局信息及所有代理节点具体使用的资源方案,信息交互开销较大,而在大多数情况下全局信息难以获得。其次,该发明场景中的所有资源是由锚节点和代理节点一起划分的,但是在实际应用场景中锚节点的功率和带宽一般都是不可调的。该发明只是研究了los场景下的理论指标speb的性能提升,并未有对实际的定位指标mse进行评估。此外,该发明在完成功率调度时,认为某一时刻场景内所有节点使用的总功率是一个定值,这样的场景并不契合实际,因为单个代理节点一般是由一个能量有限的电池供电。更为合适的做法应该是希望单个代理节点的长时平均功耗尽可能的小,从而延长其生命周期。
6、公开号为cn106714301a的专利公开了一种载波资源优化问题的混合整数线性规划求解方法(mixed integer linear programming,milp),该发明在每次进行资源分配时都需要使用现有的凸优化工具进行迭代搜索,直到带宽、载波频率和功率的变化小于特定阈值时才会停止搜索,需要花费的时间时比较长的,并且随着代理节点的增加所要花费的搜索时间会更长。
7、作者为t.zhang,a.f.molisch,y.shen,q.zhang and m.z.win,的文献"jointpower and bandwidth allocation in cooperative wireless localization networks"提出了利用泰勒展开和迭代搜索来近似求解该资源分配问题,以获得最优的资源分配方案来提高定位精度,但是利用了泰勒展开和迭代搜索的方式来近似求解非凸的功率和带宽分配问题,因此定位精度是无法达到最优的;并且其利用现有的凸优化工具对近似后的分配方案进行迭代搜索,直到带宽和功率的变化小于特定阈值时才会停止搜索,每次需要花费的时间是比较长的,在实时定位中效果不佳,并且当代理节点个数增加时所要花费的搜索时间也会相应的增加。
技术实现思路
1、针对上述问题,本发明提供了基于分布式协同资源管理的实时定位方法和装置,在保证定位精度的同时减少在线定位阶段进行资源分配时所要消耗的时间。
2、其技术方案是这样的:基于分布式协同资源管理的实时定位方法,其特征在于,包括以下步骤:
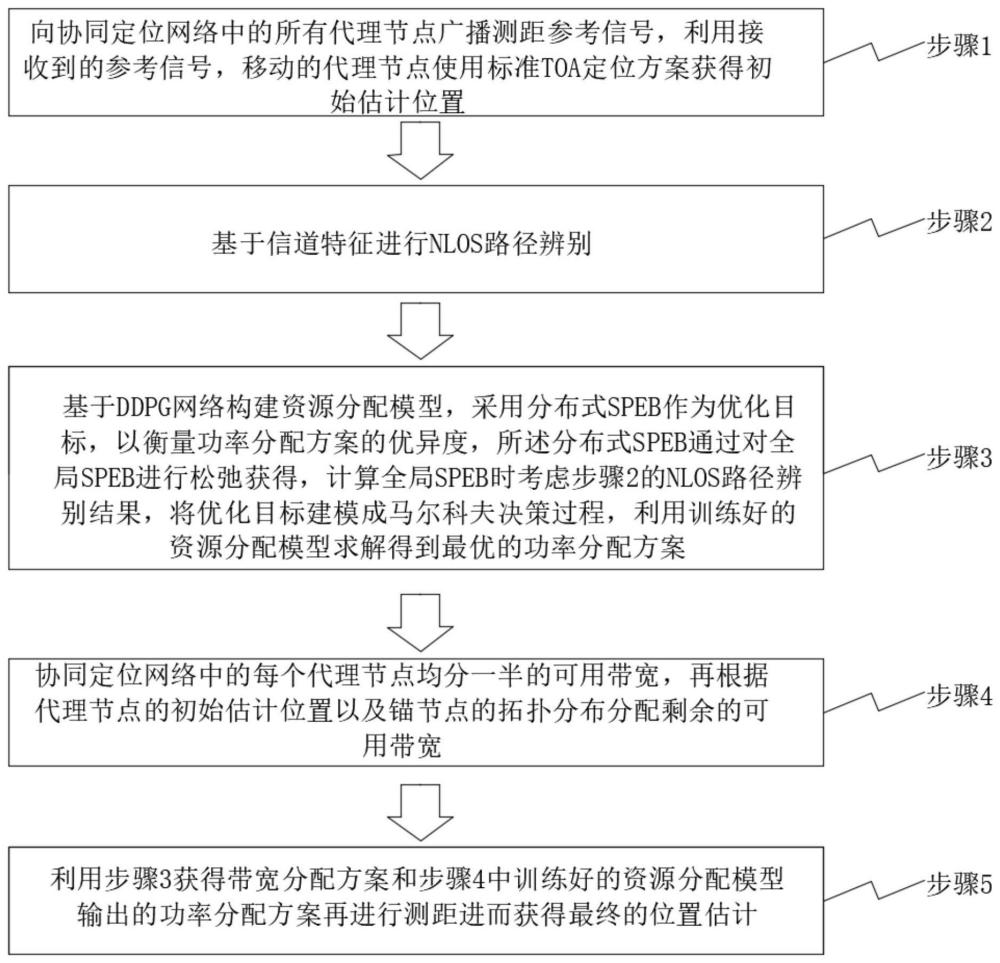
3、步骤1:向协同定位网络中的所有代理节点广播测距参考信号,利用接收到的参考信号,代理节点使用标准toa定位方案获得初始估计位置;
4、步骤2:基于信道特征进行nlos路径辨别;
5、步骤3:协同定位网络中的每个代理节点均分一半的可用带宽,再根据代理节点的初始估计位置以及锚节点的拓扑分布分配剩余的可用带宽;
6、步骤4:基于ddpg网络构建资源分配模型,采用分布式speb作为优化目标,以衡量功率分配方案的优异度,所述分布式speb通过对全局speb进行松弛获得,计算全局speb时考虑步骤2的nlos路径辨别结果,将优化目标建模成马尔科夫决策过程,利用训练好的资源分配模型求解得到最优的功率分配方案;
7、步骤5:利用步骤3获得带宽分配方案和步骤4中训练好的资源分配模型输出的功率分配方案再进行测距进而获得最终的位置估计。
8、进一步的,在步骤1中,设定无线定位网络中包括nan个锚节点和nag个代理节点,锚节点在整个定位网络能够使用的总带宽和总功率分别为ban和pan,定位网络中每个锚节点往外广播带宽为ban/nan,功率为ban/nan的测距参考信号,代理节点基于接收的参考信号结合toa定位算法,获得代理节点的初始位置估计
9、进一步的,在步骤2中,利用的信道特征包括:峭度、平均过量时延、均方时延扩展,峭度κ、平均过量时延τm、均方时延扩展τrms分别通过如下公式(1)、(2)、(3)表示:
10、
11、
12、
13、在公式(1)中,t表示积分窗口的时间长度,而u|r|和σ|r|分别表示接收信号r(t)的均值和标准差;
14、根据接收参考信号的峭度、平均过量时延、均方时延扩展获得相应路径判别概率:
15、
16、其中,ζii′、κii′、τm,ii′以及τrms,ii′分别代表第i个代理节点和第i′个代理节点之间的联合路径判别概率、峭度、平均过量时延及均方时延扩展,分别为los和nlos环境下的峭度、平均过量时延及均方时延扩展的概率密度函数,表达式为:
17、
18、
19、
20、其中,uκ和σκ分别表示lnκ的均值和标准差,um和σm分别表示lnτm的均值和标准差,urms和σrms分别表示lnτrms的均值和标准差,κ峭度κ、平均过量时延τm、均方时延扩展τrms分别根据公式(1)、公式(2)和公式(3)获得,uk和σk、um和σm、urms和σrms取自ieee 802.15.4a标准中给出的cm1-cm8信道的峭度、平均过量时延及均方时延扩展的对数正态分布参数,其中cm1、cm3、cm5、cm7分别表示的是居住区、办公区、室外、工业区的los环境,而cm2、cm4、cm6、cm8分别表示的是居住区、办公区、室外、工业区的nlos环境;
21、当ζii′>1时,判定为los路径;否则,判定为nlos路径。参照公式(4),获得第i个代理节点和第i′个代理节点之间的联合路径判别概率ζii′;同样,当时,判定为los路径;反之则判定为nlos路径,分别代表第i个代理节点与第j个锚节点之间路径的联合路径判别概率。
22、进一步的,在步骤3中,协同定位网络中的每个代理节点均分一半的可用带宽,协同定位网络中的每个代理节点预先分到的带宽为为代理节点能够使用的总带宽;再根据预估阶段得到的初始估计结果分配剩余的带宽,第i个代理节点在t时刻分配到的带宽为:
23、
24、其中,代表锚节点的平均位置。
25、进一步的,在步骤4中,无线定位网络中nag个代理节点的全局speb表达为:
26、
27、其中,je代表全局等价费舍尔信息矩阵(equivalent fisher informationmatrix,efim),tr函数表示矩阵的迹,jii′是由来自锚节点或者代理节点的测距信息ri(ranging information,ri)构成:
28、
29、公式(10)中的ri,iii′,用以下表达式表示:
30、
31、其中,ωi和pi分别表示第i个代理节点分配到的带宽和功率,和di′i分别表示第i个代理节点与第j个锚节点之间的真实传播距离、第i个代理节点与第i′个代理节点之间的真实传播距离,α是路径损失参数,和ξii′分别代表第i个代理节点与第j个锚节点之间路径的判定系数、第i个代理节点与第i′个代理节点之间路径的判定系数;当是los路径时,判定系数为1;当nlos路径时,判定系数为0;和φii′分别是从第i个代理节点到第j个锚节点的角度、第i个代理节点到第i′个代理节点的角度,d(φii′)是测距方向矩阵,表示为:
32、
33、分布式speb主要通过对全局speb进行松弛获得,具体的推导过程如下:
34、对je进行缩放得到jl,使用jl表示全局efim忽视了第2个代理节点到第nag个代理节点之间的协同,jl表示为:
35、
36、je≥jl,其中je≥jl表示矩阵je是半正定矩阵,得到以下关系式:
37、
38、其中,是一个2×2的矩阵,其保留了推导信息不等式需要用到的全部信息,此外,基于jl的第1个代理节点的efim为:
39、
40、其中,δi1=[cosφi1 sinφi1]i11[cosφi1 sinφi1]t代表第i个代理节点沿着角φi1的方向位置误差界,是je经过缩放后的得到的分布式等价费舍尔信息矩阵。
41、联立公式(14)和公式(15),可以得到:
42、
43、由于以上的推导不依赖于代理节点的索引,因此按照上述推导得到任意一个代理节点的分布式speb,如第i个代理节点的分布式speb,表示为:
44、
45、其中,为第i个代理节点的分布式speb,是仅包含第i个代理节点的局部可观测参数的efim。
46、进一步的,在步骤4中,所述马尔可夫决策过程包括:状态空间、动作空间和奖励函数,根据设置代理节点的位置、带宽、功率单数构建所述状态空间,根据代理节点当前时刻能够使用的功率值构建所述动作空间,根据分布式speb构建所述奖励函数。
47、将获得的状态空间输入到训练后的网络中,便可得到最优的资源分配方案,利用输出的分配方案再进行测距进而获得最终的位置估计
48、进一步,所述状态空间如下表示:在t时刻,第i个代理节点的状态空间表示为其中λ为观测窗口长度;
49、所述动作空间如下表示:采用各个节点分配到的功率作为ddpg网络的动作空间,第i个代理节点在t时刻的动作空间表示为pi表示在t时刻时第i个代理节点分配到的功率;
50、所述奖励函数如下表示:在设计奖励函数时,设置最小化分布式speb,同时限制长时平均功率小于阈值表示为:
51、
52、其中,β为正的加权系数,λ为代理节点的观测窗口长度,在公式(18)中,奖励函数的前半部分用于最小化分布式speb,后半部分是代理节点功率超出平均功率约束的惩罚。
53、进一步的,所述ddpg网络包括:在线actor网络、目标actor网络、在线critic网络、目标critic网络,
54、在线actor网络与目标actor网络均包括5个隐藏层,隐藏层被训练用于功率的分配,actor网络的隐藏层均采用具有70个神经元的全连接层,最后一层隐藏层采用sigmiod函数作为激活函数,其余每一层隐藏层均采用relu作为激活函数;
55、在线critic网络与目标critic网络均包括3个隐藏层,目标critic网络的隐藏层均采用具有120个神经元的全连接层,每一层隐藏层均采用relu作为激活函数。
56、一种计算机装置,其特征在于,其包括:包括处理器、存储器以及程序;
57、所述程序存储在所述存储器中,所述处理器调用存储器存储的程序,以执行上述的基于分布式协同资源管理的实时定位方法。
58、一种计算机可读存储介质,其特征在于:所述计算机可读存储介质用于存储程序,所述程序用于执行上述的基于分布式协同资源管理的实时定位方法。
59、本发明基于toa定位模型,以二维的无线协同定位网络为背景,提出了一种分布式带宽和功率分配(distributed bandwidth and power allocation,dpba)方案,在预估阶段锚节点向所有移动的代理节点广播测距参考信号,利用接收到的参考信号,代理节点使用标准toa定位方案可以估计自身初始位置,在微调阶段,采用了低信息交互开销的启发式带宽分配方案,采用ddpg网络构建资源分配模型,通过训练好的资源分配模型得到最优的功率分配方案,获得带宽分配方案和功率分配方案再进行测距进而获得最终的位置估计,在保证定位精度的同时降低计算复杂度和信息交互开销。
- 还没有人留言评论。精彩留言会获得点赞!