一种基于边缘计算的无人机载平台数据传输系统及方法
本发明涉及数据传输,尤其是一种基于边缘计算的无人机载平台数据传输系统及方法。
背景技术:
1、目前,无人机被广泛使用在跨地域的环境探测工作上,然而容易受飞行距离和周围障碍物遮挡等干扰因素,导致在数据量较大的情况下,数据传输可能会出现一定的延迟甚至是传输出现错误。边缘计算区别于云计算,作为一种分布式计算架构,在靠近数据端的节点进行数据计算,在减小传输量的同时,具有实时数据处理、低数据延时以及更高的数据带宽的优点。避免在远距离飞行过程中,由于数据量大造成的延迟导致飞行的数据无法及时反馈。
2、经检索,中国专利公开号cn111766214a公开了一种基于边缘计算的无人机载光谱成像数据处理方法及系统,由机载处理端和地面端组成,机载处理端由长波红外成像光谱仪、机载黑体定标装置、三轴稳定平台和边缘计算装置组成,地面端由地面计算装置和双屏显控组成;方法包括无人机机载处理端飞抵目标探测地域,抵达目的地悬停,机载处理端采集视频图像,边缘计算装置对数据进行干涉立方体重组、干涉数据立方体去直流、切趾处理、相位校正、干涉数据镜像及复数化和fft并得到光谱数据立方体等处理并传输到达地面端,地面端进行数据融合和界面图形显示。该专利通过将数据处理前移至无人机载平台上,在机载终端分析处理信息,减少机-地的通信量,提高了系统的可靠性和实时性。但是,该专利没有考虑到光谱系统中数据量大所带来的数据传输延迟问题,且系统设计相对于简单。
3、经检索,中国专利公开号cn115576355a公开了一种无人机数据传输系统及方法,系统包括地面控制子系统和遥控子系统;地面控制子系统包括与升空平台连接的地面控制模块,与全球定位系统无线连接的报文数据模块,报文数据模块还与地面控制模块连接;遥控子系统包括与地面控制模块连接的遥控模块,与遥控模块连接的主板模块;报文数据模块接收全球定位系统发送的差分报文数据,并将差分报文数据发送到地面控制模块;地面控制模块将差分报文数据发送到升空平台后,接收升空平台发送的测控数据,并将测控数据发送到遥控模块;遥控模块在预设时间内接收到测控数据时,将测控数据发送到主板模块;主板模块对测控数据进行处理。但是,该专利的数据传输系统设计相对于简单,仅用rs422串口作为数据传输接口,速度和传输距离上远没有以太网传输的远、传输时间延迟小。
技术实现思路
1、为了克服上述现有技术中的缺陷,本发明提供一种基于边缘计算的无人机载平台数据传输系统,基于边缘计算技术,提出了一种低延时、高时间分辨以及高吞吐量的数据传输系统。
2、为实现上述目的,本发明采用以下技术方案,包括:
3、一种基于边缘计算的无人机载平台数据传输系统,包括:无人机、云服务器、地面终端;
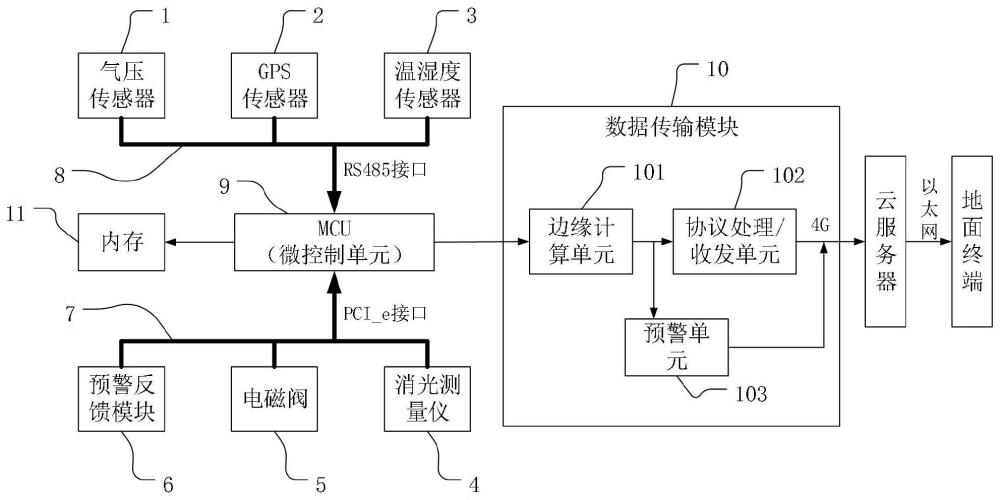
4、无人机上搭载有:气压传感器,gps传感器,温湿度传感器,消光测量仪,mcu,数据传输模块和内存单元;
5、所述气压传感器、gps传感器、温湿度传感器分别用于采集气压、gps、温湿度的信号并传输给mcu;所述mcu对气压、gps、温湿度的信号进行处理计算,得到气压、gps、温湿度数据;
6、所述消光测量仪用于采集光电信号并传输给mcu;所述mcu对光电信号进行处理计算,反演得到颗粒物浓度数据;
7、所述mcu将气压、gps、温湿度、颗粒物浓度数据分别发送给数据传输模块和内存单元;所述内存单元将各项数据进行备份存储;
8、所述数据传输模块中包括:边缘计算单元;所述边缘计算单元根据各项数据进行边缘计算;所述数据传输模块将各项数据以及边缘计算得到的数据发送给云服务器,并通过云服务器发送给地面终端。
9、优选的,所述边缘计算单元根据各项数据进行边缘计算,得到融合后的高度数据,具体如下所示:
10、根据当前气压值p,计算当前气压值p对应的气压高度ha:
11、
12、其中,p0为0℃下的海平面的标准大气压强,p0=101.325kpa,t为当前温度,单位为℃;
13、将当前气压值p对应的气压高度ha和当前的gps高度hgps进行数据融合,得到融合后的高度h:
14、h=ha*(1-ks)+hgps*ks;
15、其中,ks为融合比例。
16、优选的,所述边缘计算单元在计算当前气压值p对应的气压高度ha之前,还对所接收的气压数据进行平滑滤波,滤波方式为:设置滑动窗口的长度为l,针对一个窗口内的气压数据,按照气压值的大小进行排序,选择中位数作为滤波输出,即选择中位数作为当前气压值p。
17、优选的,所述数据传输模块中还包括预警单元,所述预警单元用于对无人机的高度进行预警,在高度超过设定阈值时,通过云服务器向地面终端发出预警信息。
18、优选的,所述数据传输模块中还包括协议处理/收发单元;所述数据传输模块通过协议处理/收发单元将数据打包发送给云服务器。
19、优选的,所述协议处理/收发单元还对发送的数据进行校验,得到校验结果并附在发送的数据中。
20、优选的,所述气压传感器、gps传感器、温湿度传感器通过低速传输总线将气压、gps、温湿度的信号传输给mcu;所述消光测量仪为通过高速传输总线将光电信号传输给mcu。
21、优选的,所述低速传输总线采用rs485接口,所述高速传输总线采用pci_e接口。
22、优选的,无人机上还搭载有电磁阀、预警反馈模块;所述电磁阀用于控制消光测量仪采样口的开闭,所述预警反馈模块中设有颗粒物浓度的阈值,若测量得到的颗粒物浓度数据超出设定阈值,则预警反馈模块为预警状态,自动关闭电磁阀,从而关闭消光测量仪的采样口;否则,不关闭消光测量仪的采样口。
23、本发明还提供了一种适用于上述数据传输系统的方法,其特征在于,包括以下步骤:
24、s1,气压传感器、gps传感器、温湿度传感器分别实时采集气压、gps、温湿度的信号并传输给mcu;消光测量仪实时采集光电信号并传输给mcu;
25、s2,mcu对气压、gps、温湿度的信号进行处理计算,得到气压、gps、温湿度数据;mcu对光电信号进行处理计算,反演得到颗粒物浓度数据;
26、s3,mcu将气压、gps、温湿度、颗粒物浓度数据发送给内存单元进行备份存储;同时,mcu还将气压、gps、温湿度、颗粒物浓度数据发送数据传输模块;
27、s4,数据传输模块中的边缘计算单元根据所接收的各项数据进行边缘计算,具体如下所示:
28、根据当前气压值p,计算当前气压值p对应的气压高度ha:
29、
30、其中,p0为0℃下的海平面的标准大气压强,p0=101.325kpa,t为当前温度,单位为℃;
31、将当前气压值p对应的气压高度ha和当前的gps高度hgps进行数据融合,得到融合后的高度h:
32、h=ha*(1-ks)+hgps*ks;
33、其中,ks为融合比例;
34、s5,数据传输模块中的协议处理/收发单元102将各项数据以及边缘计算得到的数据打包并发送给云服务器;
35、s6,云服务器接收到数据传输模块所发送的数据包后,对数据包进行存储,同时将数据包发送给地面终端。
36、本发明的优点在于:
37、(1)本发明提出了一种低延时、高时间分辨以及高吞吐量的数据传输系统。基于边缘计算技术,在靠近数据端的节点内,内置了数据融合算法,结合气压传感器和gps传感器的数据得到准确的高度信息。
38、(2)准确的高度信息对于无人机来说非常的重要,现在常使用的gps传感器对于经纬度的定位是非常准确的,但在纵向高度上的定位精度取决于卫星的数量,因此在周围环境信号较弱的情况下,gps传感器定位的高度可能不太准确,为此,本发明利用气压信息作为高度计算的参考信息,通过气压数据和gps数据融合算法,计算得到融合后的高度数据,获得准确的高度信息。
39、(3)本发明考虑到不同传感器对于传输速度的需求各有差异,因此设计了高速和低速两种传输总线,高速传输总线可以实现毫秒级的数据更新速度,满足消光测量仪的传输速度需求,低速传输总线可以实现秒量级的数据更新速度,并且拓展至多128个传感器信息并行工作,满足气压传感器、gps传感器、温湿度传感器的传输速度需求。
40、(4)本发明在数据打包发送的过程中,还对发送数据进行校验,保证数据传输的准确度。
41、(5)本发明的内存单元将各项数据进行备份存储,实现数据的冗余备份。同时,云服务器还具有数据存储功能,以确保数据能够及时的保存,防止数据丢失。
- 还没有人留言评论。精彩留言会获得点赞!