基于UWB的盲环境应急救援方法及装置与流程
本发明涉及通信定位,尤其涉及一种基于uwb的盲环境应急救援方法及装置。
背景技术:
1、随着无线通信技术的发展,位置信息成为了互联网的重要属性之一。在普通环境下,卫星定位、基站定位、wifi指纹库定位等的位置信息获取一般依赖于提前布置的基础设施。然而,在盲环境中,具有无数据库、无基础设施、无地图信息、特定的导航、定位需求的特点,让很多常用的定位技术难以使用。在上述环境中,特别是诸如野外作战的士兵,森林中登上的行人,矿井下工作的工人,火场中工作的消防员,目标人员的位置信息不仅仅是场外指挥的需求,更是安全保障的首要条件。一旦有紧急情况发生,及时获得目标的位置信息,提供指向目标前进的方向,是展开高效、迅速搜救的关键。因此,盲环境中的定位变得十分有意义。
2、传统的定位技术,例如全球定位系统(gps)、北斗卫星导航系统、激光雷达、图像等方法,隶属于非盲环境下的定位技术,即这些方法都依赖于基站、指纹数据库、地图等已有信息或者设备。然而,传统的定位技术并不适用于盲环境应急救援场景。
技术实现思路
1、本发明描述了一种基于uwb的盲环境应急救援方法及装置,能够提高盲环境应急救援效率。
2、根据第一方面,本发明提供了一种基于uwb的盲环境应急救援方法,包括:
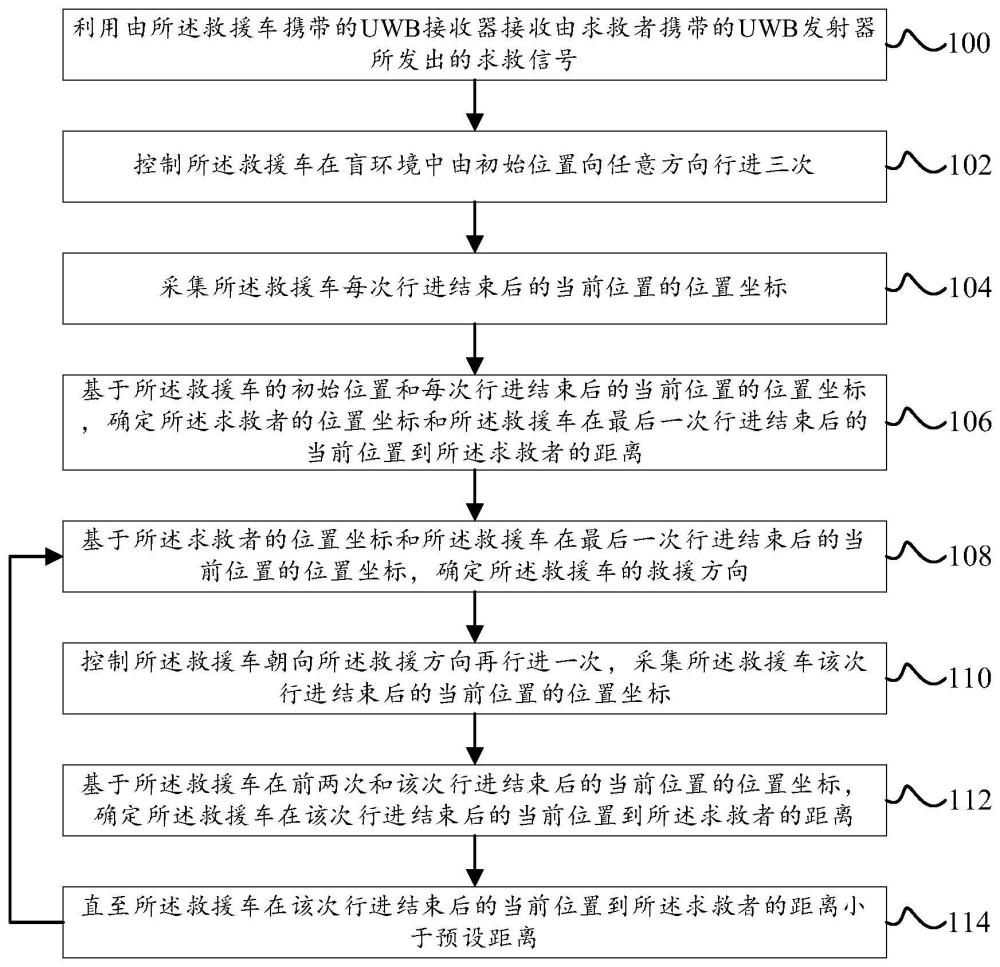
3、步骤100、利用由所述救援车携带的uwb接收器接收由求救者携带的uwb发射器所发出的求救信号;
4、步骤102、控制所述救援车在盲环境中由初始位置向任意方向行进三次;其中,在所述救援车的应急救援过程中,所述求救者的位置坐标固定不变;
5、步骤104、采集所述救援车每次行进结束后的当前位置的位置坐标;
6、步骤106、基于所述救援车的初始位置和每次行进结束后的当前位置的位置坐标,确定所述求救者的位置坐标和所述救援车在最后一次行进结束后的当前位置到所述求救者的距离;
7、步骤108、基于所述求救者的位置坐标和所述救援车在最后一次行进结束后的当前位置的位置坐标,确定所述救援车的救援方向;
8、步骤110、控制所述救援车朝向所述救援方向再行进一次,采集所述救援车该次行进结束后的当前位置的位置坐标;
9、步骤112、基于所述救援车在前两次和该次行进结束后的当前位置的位置坐标,确定所述救援车在该次行进结束后的当前位置到所述求救者的距离;
10、步骤114、循环执行步骤108~112,直至所述救援车在该次行进结束后的当前位置到所述求救者的距离小于预设距离。
11、根据第二方面,本发明提供了一种基于uwb的盲环境应急救援装置,包括:
12、接收单元,被配置为利用由所述救援车携带的uwb接收器接收由求救者携带的uwb发射器所发出的求救信号;
13、控制单元,被配置为控制所述救援车在盲环境中由初始位置向任意方向行进三次;其中,在所述救援车的应急救援过程中,所述求救者的位置坐标固定不变;
14、第一采集单元,被配置为采集所述救援车每次行进结束后的当前位置的位置坐标;
15、第一确定单元,被配置为基于所述救援车的初始位置和每次行进结束后的当前位置的位置坐标,确定所述求救者的位置坐标和所述救援车在最后一次行进结束后的当前位置到所述求救者的距离;
16、第二确定单元,被配置为基于所述求救者的位置坐标和所述救援车在最后一次行进结束后的当前位置的位置坐标,确定所述救援车的救援方向;
17、第二采集单元,被配置为控制所述救援车朝向所述救援方向再行进一次,采集所述救援车该次行进结束后的当前位置的位置坐标;
18、第三确定单元,被配置为基于所述救援车在前两次和该次行进结束后的当前位置的位置坐标,确定所述救援车在该次行进结束后的当前位置到所述求救者的距离;
19、循环单元,被配置为循环执行第二确定单元、第二采集单元和第三确定单元的操作,直至所述救援车在该次行进结束后的当前位置到所述求救者的距离小于预设距离。
20、根据本发明提供的基于uwb的盲环境应急救援方法及装置,通过uwb技术实现盲环境应急救援,隶属于盲环境下的定位技术,不依赖于已有的基站、地图、指纹信息;能够克服发射器和接收器时钟不同步引起的定位偏差;能够通过不停地迭代定位,逐渐逼近搜救者位置。因此,上述技术方案能够提高盲环境应急救援效率。
技术特征:
1.一种基于uwb的盲环境应急救援方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在所述救援车在盲环境中由初始位置向任一方向行进三次时,所述救援车每次行进结束后的当前位置的位置坐标组成的3×3矩阵的行列式值不等于0;其中,该3×3矩阵为:
3.根据权利要求2所述的方法,其特征在于,所述救援车每次行进结束后的当前位置的位置坐标是通过如下方式采集的:
4.根据权利要求3所述的方法,其特征在于,所述求救者的位置坐标和所述救援车在最后一次行进结束后的当前位置到所述求救者的距离是通过如下公式确定的:
5.根据权利要求4所述的方法,其特征在于,在确定所述求救者的位置坐标之后,还包括:
6.一种基于uwb的盲环境应急救援装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,在所述救援车在盲环境中由初始位置向任一方向行进三次时,所述救援车每次行进结束后的当前位置的位置坐标组成的3×3矩阵的行列式值不等于0;其中,该3×3矩阵为:
8.根据权利要求7所述的装置,其特征在于,所述救援车每次行进结束后的当前位置的位置坐标是通过如下方式采集的:
9.根据权利要求8所述的装置,其特征在于,所述求救者的位置坐标和所述救援车在最后一次行进结束后的当前位置到所述求救者的距离是通过如下公式确定的:
10.根据权利要求9所述的装置,其特征在于,还包括:
技术总结
本发明涉及通信定位技术领域,尤其涉及基于UWB的盲环境应急救援方法及装置,包括:救援车接收求救者发出的求救信号;控制救援车由初始位置行进三次;采集救援车每次行进结束后位置坐标;基于初始位置和每次行进结束后位置坐标,确定求救者的位置坐标和救援车在最后一次行进结束后到求救者的距离;基于求救者的位置坐标和救援车在最后一次行进结束后位置坐标,确定救援车的救援方向;控制救援车朝向救援方向再行进一次,采集救援车该次行进结束后位置坐标;基于救援车在前两次和该次行进结束后位置坐标,确定救援车在该次行进结束后到求救者的距离,直至救援车在该次行进结束后到求救者的距离小于预设距离。上述方案能够提高盲环境应急救援效率。
技术研发人员:伍伟康,楼志江,李德成,陈勇,黎昌星
受保护的技术使用者:深圳市达辰威科技集团有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!