一种应急无线链路系统的连接方法和装置与流程
本发明涉及应急无线链路系统通信,尤其涉及一种应急无线链路系统的连接方法和装置。
背景技术:
1、目前,我国的应急无线链路系统的功能相对较少,而且对于基础通信设施的依赖性较大,所以在网络自组织方面和生存能力方面都存在不足,很多的业务服务并不完善。在发生灾情时,会存在电力中断、通信基站以及通信线路受损等情况,这导致传统的通信方式失效,救援人员不能及时有效沟通,导致救援人员实时位置难以追踪,救灾装备无法快速送达救援人员所在地,同时,指挥者的命令难以传达至救援人员,大大影响现场救援效率。为此,需要提供一种适用于灾情现场的应急无线链路系统连接方法。
2、现有的应急无线链路系统连接一般采用卫星通信方式,实现应急无线链路系统内各个模块之间的通信,但由于各参数通信逻辑关系复杂,使得模块之间的连接存在机动性差、通信距离短和无法传输大数据信息等问题,降低了应急无线链路系统可靠性。
技术实现思路
1、本发明提供了一种应急无线链路系统的连接方法和装置,解决了现有的应急无线链路系统连接一般采用卫星通信方式,实现应急无线链路系统内各个模块之间的通信,但由于各参数通信逻辑关系复杂,使得模块之间的连接存在机动性差、通信距离短和无法传输大数据信息等问题,降低了应急无线链路系统可靠性的技术问题。
2、本发明第一方面提供的一种,所述应急无线链路系统包括主控模块、天线模块、无人机和参数收集组件,所述主控模块、所述天线模块、所述无人机和所述参数收集组件之间通信连接,包括:
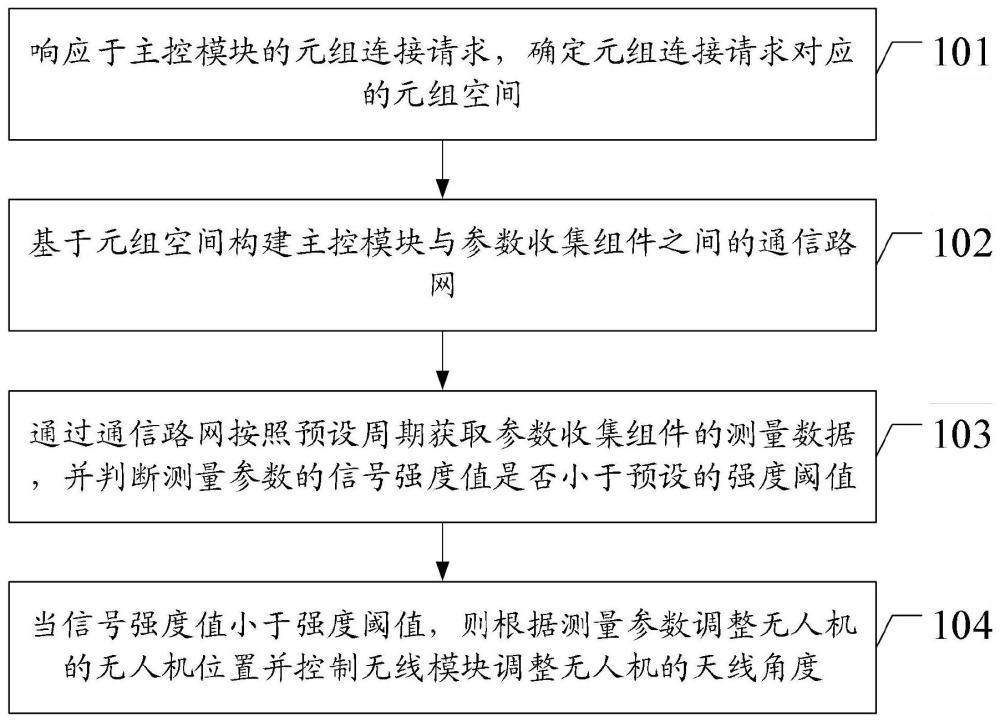
3、响应于所述主控模块的元组连接请求,确定所述元组连接请求对应的元组空间;
4、基于所述元组空间构建所述主控模块与所述参数收集组件之间的通信路网;
5、通过所述通信路网按照预设周期获取所述参数收集组件的测量数据,并判断所述测量参数的信号强度值是否小于预设的强度阈值;
6、当所述信号强度值小于所述强度阈值,则根据所述测量参数调整所述无人机的无人机位置并控制所述无线模块调整所述无人机的天线角度。
7、可选地,所述参数收集组件包括地磁传感器模块、信号检测模块、gps定位模块和角度传感器模块,所述元组空间包括第一元组空间和第二元组空间,所述基于所述元组空间构建所述主控模块与所述参数收集组件之间的通信路网的步骤,包括:
8、基于所述第一元组空间和所述第二元组空间构建所述主控模块与所述地磁传感器模块之间的第一通信路径;
9、基于所述第一元组空间和所述第二元组空间构建所述主控模块与所述角度传感器模块之间的第二通信路径;
10、基于所述第一元组空间和所述第二元组空间构建所述主控模块与所述gps定位模块之间的第三通信路径;
11、基于所述第一元组空间和所述第二元组空间构建所述主控模块与所述信号检测模块之间的第四通信路径;
12、采用所述第一通信路径、所述第二通信路径、所述第三通信路径和所述第四通信路径构建通信路网。
13、可选地,所述基于所述第一元组空间和所述第二元组空间构建所述主控模块与所述地磁传感器模块之间的第一通信路径的步骤,包括:
14、控制所述地磁传感器模块将预设的第一能力元组插入所述第一元组空间,其中,所述第一能力元组用于对外提供天线方位参数;
15、通过所述主控模块将预设的第一兴趣元组插入所述第二元组空间,其中,所述第一兴趣元组包含天线方位参数名称;
16、判断所述第一能力元组与所述第一兴趣元组是否匹配;
17、当所述第一能力元组与所述第一兴趣元组匹配时,则控制所述地磁传感器模块将包含地磁传感器模块地址信息的第一应答元组插入所述第一元组空间,并向所述第二元组空间单播所述第一应答元组;
18、通过所述主控模块将预设的第一资源元组插入所述第二元组空间,生成第一通信路径,其中,所述第一资源元组用于记录所述第一应答元组的地址信息。
19、可选地,所述基于所述第一元组空间和所述第二元组空间构建所述主控模块与所述角度传感器模块之间的第二通信路径的步骤,包括:
20、控制所述角度传感器模块将预设的第二能力元组插入所述第一元组空间,其中,所述第二能力元组用于对外提供天线角度参数;
21、通过所述主控模块将预设的第二兴趣元组插入所述第二元组空间,其中,所述第二兴趣元组包含天线角度参数名称;
22、判断所述第二能力元组与所述第二兴趣元组是否匹配;
23、当所述第二能力元组与所述第二兴趣元组匹配时,则控制所述角度传感器模块将包含角度传感器地址信息的第二应答元组插入所述第一元组空间并向所述第二元组空间单播所述第二应答元组;
24、通过所述主控模块将预设的第二资源元组插入所述第二元组空间,生成第二通信路径,其中,所述第二资源元组用于记录所述第二应答元组内的地址信息。
25、可选地,所述基于所述第一元组空间和所述第二元组空间构建所述主控模块与所述gps定位模块之间的第三通信路径的步骤,包括:
26、控制所述gps定位模块将预设的第三能力元组插入所述第一元组空间,其中,所述第三能力元组用于对外提供无人机位置参数;
27、通过所述主控模块将预设的第三兴趣元组插入所述第二元组空间,其中,所述第三兴趣元组包含无人机位置参数;
28、判断所述第三能力元组与所述第三兴趣元组是否匹配;
29、当所述第三能力元组与所述第三兴趣元组匹配时,则控制所述gps定位模块将包含gps定位模块地址信息的第三应答元组插入所述第一元组空间并向所述第二元组空间单播所述第三应答元组;
30、通过所述主控模块将预设的第三资源元组插入所述第二元组空间,生成第三通信路径,其中,所述第三资源元组用于记录所述第三应答元组内的地址信息。
31、可选地,所述基于所述第一元组空间和所述第二元组空间构建所述主控模块与所述信号检测模块之间的第四通信路径的步骤,包括:
32、控制所述信号检测模块将预设的第四能力元组插入所述第一元组空间,其中,所述第四能力元组用于对外提供信号强度参数;
33、通过所述主控模块将预设的第四兴趣元组插入所述第二元组空间,其中,所述第四兴趣元组包含信号强度参数名称;
34、判断所述第四能力元组与所述第四兴趣元组是否匹配;
35、当所述第四能力元组与所述第四兴趣元组匹配时,则控制所述信号检测模块将包含信号检测模块地址信息的第四应答元组插入所述第一元组空间并向所述第二元组空间单播所述第四应答元组;
36、通过主控模块将预设的第四资源元组插入所述第二元组空间,生成第四通信路径,其中,所述第四资源元组用于记录所述第四应答元组内的地址信息。
37、可选地,所述测量参数包括天线方位和天线角度,所述根据所述测量参数调整所述无人机的无人机位置并控制所述无线模块调整所述无人机的天线角度的步骤,包括:
38、控制所述无人机从所述无线方位按照预设的移动路径移动到预设标准无人机位置;
39、通过所述无线模块控制所述无人机的天线从所述天线角度调整至预设标准天线角度。
40、本发明第二方面提供的一种应急无线链路系统的连接装置,所述应急无线链路系统包括主控模块、天线模块、无人机和参数收集组件,所述主控模块、所述天线模块、所述无人机和所述参数收集组件之间通信连接,包括:
41、响应模块,用于响应于所述主控模块的元组连接请求,确定所述元组连接请求对应的元组空间;
42、组网模块,用于基于所述元组空间构建所述主控模块与所述参数收集组件之间的通信路网;
43、分析模块,用于通过所述通信路网按照预设周期获取所述参数收集组件的测量数据,并判断所述测量参数的信号强度值是否小于预设的强度阈值;
44、调节模块,用于当所述信号强度值小于所述强度阈值,则根据所述测量参数调整所述无人机的无人机位置并控制所述无线模块调整所述无人机的天线角度。
45、可选地,所述参数收集组件包括地磁传感器模块、信号检测模块、gps定位模块和角度传感器模块,所述元组空间包括第一元组空间和第二元组空间,所述组网模块,包括:
46、第一路径子模块,用于基于所述第一元组空间和所述第二元组空间构建所述主控模块与所述地磁传感器模块之间的第一通信路径;
47、第二路径子模块,用于基于所述第一元组空间和所述第二元组空间构建所述主控模块与所述角度传感器模块之间的第二通信路径;
48、第三路径子模块,用于基于所述第一元组空间和所述第二元组空间构建所述主控模块与所述gps定位模块之间的第三通信路径;
49、第四路径子模块,用于基于所述第一元组空间和所述第二元组空间构建所述主控模块与所述信号检测模块之间的第四通信路径;
50、组网子模块,用于采用所述第一通信路径、所述第二通信路径、所述第三通信路径和所述第四通信路径构建通信路网。
51、可选地,所述测量参数包括天线方位和天线角度,所述调节模块,包括:
52、第一调节子模块,用于控制所述无人机从所述无线方位按照预设的移动路径移动到预设标准无人机位置;
53、第二调节子模块,用于通过所述无线模块控制所述无人机的天线从所述天线角度调整至预设标准天线角度。
54、从以上技术方案可以看出,本发明具有以下优点:
55、响应于主控模块的元组连接请求,确定元组连接请求对应的元组空间,基于元组空间构建主控模块与参数收集组件之间的通信路网,通过通信路网按照预设周期获取参数收集组件的测量数据,并判断测量参数的信号强度值是否小于预设的强度阈值,当信号强度值小于强度阈值,则根据测量参数调整无人机的无人机位置并控制无线模块调整无人机的天线角度。解决了现有的应急无线链路系统连接一般采用卫星通信方式,但由于各参数通信逻辑关系复杂,使得模块之间的连接存在机动性差、通信距离短和无法传输大数据信息等问题,降低了应急无线链路系统可靠性的技术问题。本技术通过将主控模块和参数收集组件集成于元组空间内,将分析逻辑与交互逻辑完成分离,保障了模块之间高效连接,提高了应急无需链路系统的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!