一种摄像高速球机的转动控制结构的制作方法
本技术涉及摄像控制领域,特别涉及一种摄像高速球机的转动控制结构。
背景技术:
1、高清球体摄像机内部有两个控制电机,分别负责云台的上下和左右各方向的转动,使用简单但功能强大,广泛应用于开阔区域监控,众所周知,在安防行业中,这样的高清球机可以带动摄像机不断做360度水平往返复转和垂直方向90度往返转动,同时具备变倍摄像机看得广和高速球看得清的优点,解决了全方位监控,让监控没有死角的问题。随着对摄像拍照的定位精度要求越来越高,现有高清球体摄像机的控制电机采用粗犷式转动来扫描开阔区域的方式无法满足高精度的要求,而且现有高清球体摄像机无法定位用户所需的拍摄位置,用户每次使用时都需自行调节拍摄角度,给操作带来不便。
技术实现思路
1、本实用新型提供一种摄像高速球机的转动控制结构,旨在解决现有高清球体摄像机控制精度低,无法自行定位摄像位置的问题。
2、本实用新型提供一种摄像高速球机的转动控制结构,包括控制主板、自动聚焦的变倍摄像一体机、带动变倍摄像一体机在竖直方向上转动的垂直电机、带动变倍摄像一体机在水平方向上转动的水平电机,所述控制主板包括mcu主控芯片u3、垂直电机驱动芯片u2、水平电机驱动芯片u1、光耦判断模块,所述mcu主控芯片u3分别连接垂直电机驱动芯片u2、水平电机驱动芯片u1的输入端,所述垂直电机驱动芯片u2的输出端连接垂直电机,所述垂直电机驱动芯片u2的输出端连接垂直电机,所述mcu主控芯片u3连接并控制变倍摄像一体机,所述光耦判断模块与mcu主控芯片u3连接,所述mcu主控芯片u3通过光耦判断模块定位变倍摄像一体机摆动的位置。
3、作为本实用新型的进一步改进,所述mcu主控芯片u3的第8、9接脚分别连接垂直电机驱动芯片u2的phase1、phase2控制输入接脚,所述mcu主控芯片u3的第10、11接脚分别连接水平电机驱动芯片u1的phase1、phase2控制输入接脚,所述垂直电机驱动芯片u2的tma+、tma-、tmb+、tmb-驱动输出接脚通过插座j2连接到垂直电机,所述水平电机驱动芯片u1的pm1+、pm1-、pm2+、pm2-驱动输出接脚通过插座j1连接到水平电机。
4、作为本实用新型的进一步改进,所述控制主板还包括水平电机控制模块,所述水平电机控制模块包括电阻r1、r4、r9、r10、r13、r14,电容c1、c2、c3、c4,所述电阻r1的一端连接mcu主控芯片u3的第22脚,所述电阻r1的另一端分别连接电阻r9、电容c1的一端,所述电阻r9的另一端分别连接水平电机驱动芯片u1的第15脚、电阻r13、电容c2的一端,所述电容c1分别连接电容c2、电阻r13的另一端及接地;所述电阻r4的一端连接mcu主控芯片u3的第23脚,所述电阻r4的另一端分别连接点r10、电容c3的一端,所述电阻r10的另一端分别连接水平电机驱动芯片u1的第11脚、电阻r14、电容c4的另一端,所述电容c3的另一端分别连接电容c3、电阻r14的另一端及接地。
5、作为本实用新型的进一步改进,所述控制主板还包括垂直电机控制模块,所述垂直电机控制模块包括电阻r5、r8、r11、r12、r15、r16,电容c5、c6、c7、c8,所述电阻r5的一端连接mcu主控芯片u3的第26脚,所述电阻r5的另一端分别连接电阻r11、电容c5的一端,所述电阻r11的另一端分别连接垂直电机驱动芯片u2的第15脚、电阻r15、电容c7的一端,所述电容c5的另一端分别连接电容c7、电阻r15的另一端及接地;所述电阻r8的一端连接mcu主控芯片u3的第27脚,所述电阻r8的另一端分别连接电阻r12、电容c6的一端,所述电阻r12的另一端分别连接垂直电机驱动芯片u2的第11脚、电阻r16、电容c8的一端,所述电容c6的另一端分别连接电容c8、电阻r16的另一端及接地。
6、作为本实用新型的进一步改进,所述光耦判断模块包括光电耦合器gk1、电阻r33、r41,所述光电耦合器gk1的阳极连接电阻r41的一端,所述光电耦合器gk1的集电极分别连接电阻r33的一端、mcu主控芯片u3的第15脚,所述光电耦合器gk1的阴极和发射极均接地,所述电阻r33、电阻r41的另一端均接入vcc端。
7、作为本实用新型的进一步改进,所述控制主板还包括rs485控制模块,所述rs485控制模块包括芯片u5、芯片u10,所述芯片u5的第1脚连接mcu主控芯片u3的第43脚,所述芯片u5的第4脚连接mcu主控芯片u3的第42脚,所述芯片u5的第2脚和第3脚并联后连接mcu主控芯片u3的第28脚;所述芯片u10的第1脚连接mcu主控芯片u3的第30脚,所述芯片u10的第4脚连接mcu主控芯片u3的第29脚,所述芯片u10的第2脚和第3脚并联后连接mcu主控芯片u3的第25脚;所述芯片u5、u10的r+、r-输出端分别连接插座j5。
8、作为本实用新型的进一步改进,所述控制主板还包括加密模块,所述加密模块包括加密芯片u6、电阻r36、r37、电容c25,所述加密芯片u6的第5脚分别连接mcu主控芯片u3的第61脚、电阻r37的一端,所述加密芯片u6的第6脚分别连接mcu主控芯片u3的第57脚、电阻r36的一端,所述电阻r37的另一端分别连接电阻r36的另一端、加密芯片u6的第8脚、电容c25的一端,所述电容c25的另一端接地。
9、作为本实用新型的进一步改进,所述控制主板还包括flash模块,所述flash模块包括芯片u7、电阻r38、r39、r40,所述芯片u7的第1脚连接电阻r38的一端,所述芯片u7的第2、3、4脚均接地,所述芯片u7的第5脚分别连接mcu主控芯片u3的第59脚、电阻r40的一端,所述芯片u7的第6脚分别连接mcu主控芯片u3的第58脚、电阻r39的一端,所述芯片u7的第7脚连接mcu主控芯片u3的第2脚,所述芯片u7的第8脚、电阻r38、r39、r40的另一端均接入3.3v端。
10、作为本实用新型的进一步改进,所述控制主板还包括复位模块,所述复位模块包括电阻r34、r35、电容c22、二极管d1、发光二极管d5,所述发光二极管d5的阴极连接mcu主控芯片u3的第41脚,所述发光二极管d5的阳极连接电阻r34的一端,所述电阻r34的另一端分别连接电阻r35的一端、二极管d1的阴极,所述电阻r35的另一端分别连接二极管d1的阳极、电容c22的一端、mcu主控芯片u3的第7脚,所述电容c22的另一端接地。
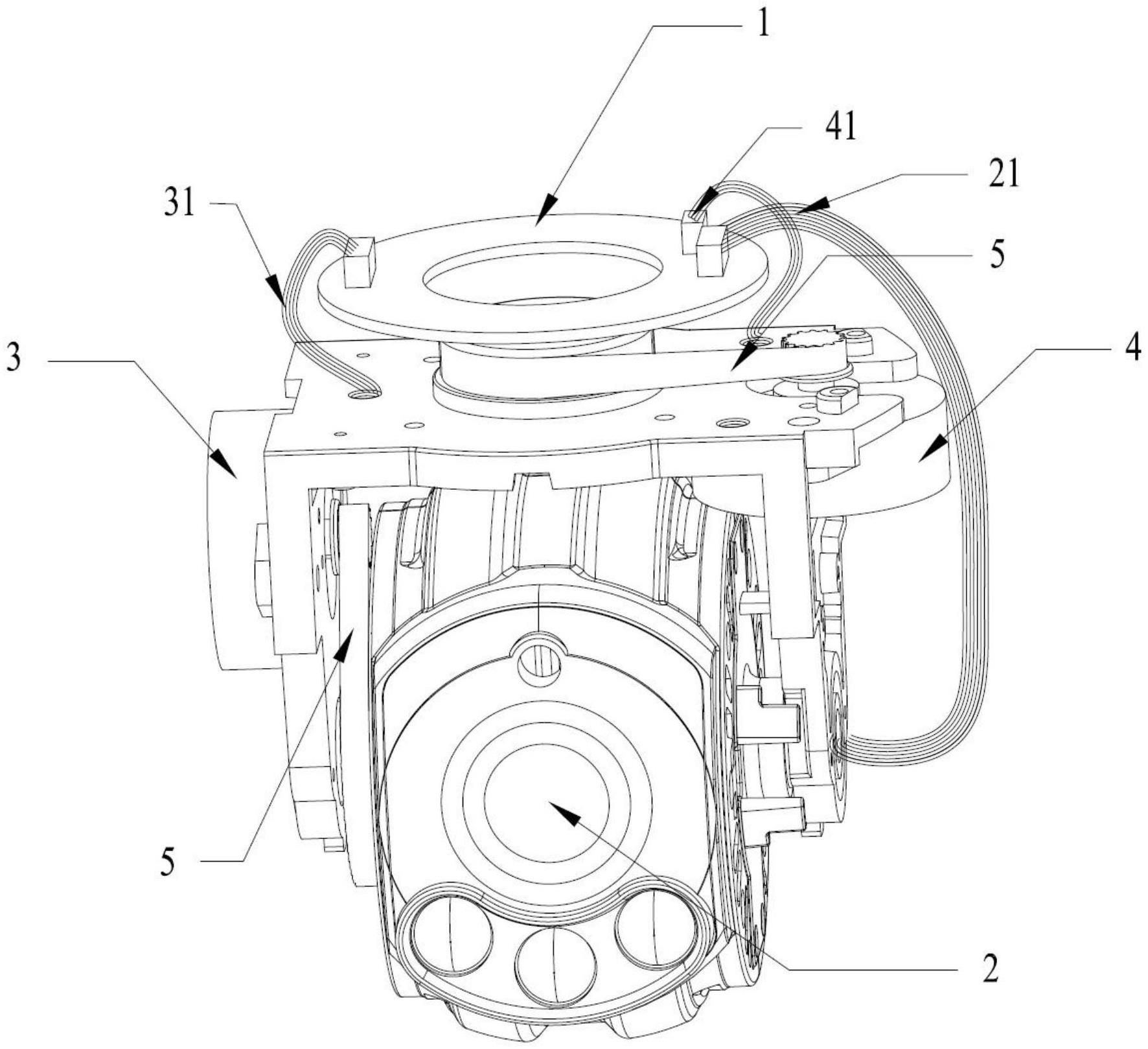
11、作为本实用新型的进一步改进,摄像高速球机的转动控制结构包括同步带、驱动底座,所述变倍摄像一体机设有垂直转轴,所述变倍摄像一体机通过垂直转轴安装在驱动底座上,所述垂直电机通过同步带连接垂直转轴,所述驱动底座上设有水平转轴,所述水平电机通过同步带连接水平转轴,所述控制主板安装在驱动底座上。
12、本实用新型的有益效果是:本结构中在mcu控制端口与控制电机之间增加电机驱动芯片,通过两个电机驱动芯片去驱动水平及垂直电机,让步进电机的细分控制更加准确。并通过光耦判断模块判断球机的位置,让球机每次上电后能停留在设定位置,满足了对摄像定位精度的要求。
- 还没有人留言评论。精彩留言会获得点赞!