一种融合聚类与选择优化的无人机联邦学习方法
本发明属于无人机移动通信,特别涉及一种融合聚类与选择优化的无人机联邦学习方法。
背景技术:
1、在5g通信网络的背景下,边缘计算已经成为支持低延迟和关键任务应用的关键技术。相较于固定位置的边缘服务器,无人机(unmanned aerial vehicle,uav)支持的移动边缘计算(mobile edge computing,mec)在提供广泛的、灵活的部署能力、可靠的通信服务、以及高效的数据收集和处理方面扮演着至关重要的角色。得益于其先进的成像能力,无人机收集的图像数据已经被广泛应用于交通监控、道路提取、遥感等领域,这些应用场景迫切需要快速且实时的数据分析,进而催生了对定制化且安全的机器学习(ml)模型的需求。
2、然而,传统的ml模型训练方法依赖于将无人机感测数据集中至中央处理实体,这种做法会因无线通信的广播特性而引发隐私泄露和数据滥用的风险。此外,将大量原始数据流如uav图像、视频传输至服务器,不仅会消耗大量的无线带宽资源并可能在网络高峰期造成饱和,也会加速无人机电池的耗尽,影响其持续运行时间。
3、为应对这些挑战,联邦学习(federated learning,fl)作为一种新兴的分布式ml范式,近期受到了广泛关注。fl通过允许多个参与者在不共享本地数据的前提下协作训练ml模型,从而保护了数据隐私。在这一过程中,中央服务器仅负责聚合非敏感的更新数据以训练全局模型,并将模型更新分发给fl参与者。值得注意的是,并非所有设备都参与到每一轮的fl过程中,通常只有一个设备子集被选中参与。这种方法适用于处理具有不同ml能力和数据属性的异构设备集合。尽管随机选择参与者是一种常见的策略,但这可能导致fl性能不佳。
4、在无人机系统的应用背景下,数据冗余是一个常见且棘手的问题。不同无人机可能会捕获到高度相似甚至几乎重复的图像。这种数据冗余不仅导致了存储空间、计算资源和电力的无谓消耗,而且由于样本中缺乏新颖性和多样性,可能会导致ml模型的偏差。提高联邦学习沟通效率研究提出并非所有可用的设备都参与fl过程,每次只选择一个子集参与fl。这种方法允许处理具有不同ml功能和数据属性的异构设备。
技术实现思路
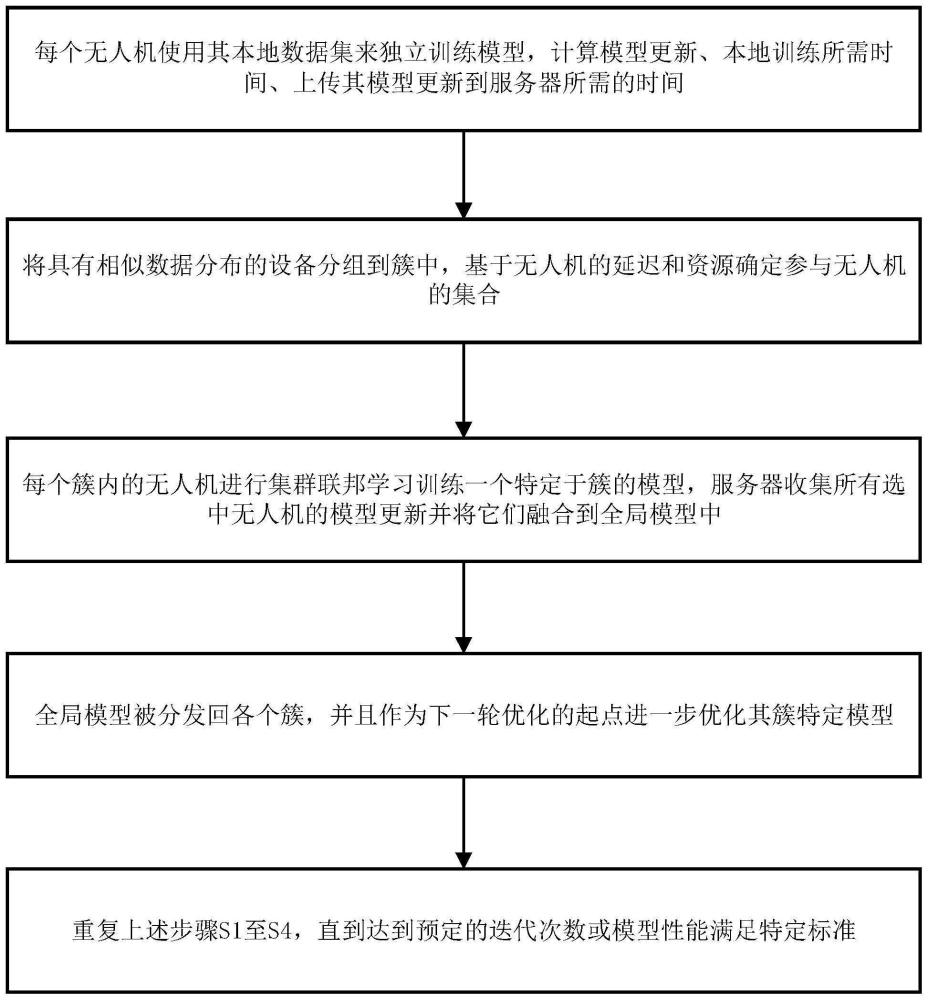
1、为了提高无人机网络中的ml模型训练效率和性能,本发明提出一种融合聚类与选择优化的无人机联邦学习方法,具体包括以下步骤:
2、云端下发全局模型参数到各个无人机,无人机利用本地数据对模型进行训练,获取模型更行、本地训练以及上传更新后的模型参数到云端所需的时间;
3、根据无人机更新参数模型的梯度方向对无人机进行分簇,构建目标函数获取处于静止状态的无人机集群,从处于静止状态的无人机集群中根据无人机的延迟确定参与模型更新的无人机集合;
4、每个簇内被选中进行模型参数更新的无人机进行集群联邦学习训练一个基于其所在簇的模型参数并上传到云端;
5、云端收集所有选中无人机的模型参数,并将收集的模型参数更新全局模型参数;
6、将更新后的全局模型参数下发到无人机,重复以上操作,直到达到预设训练次数或者满足训练停止条件。
7、进一步的,根据无人机更新参数模型的梯度方向对无人机进行分簇,即选择无人机梯度更新方向之间的余弦相似度进行分簇,当余弦相似度完全一致时,将两个无人机分到一个簇中,无人机梯度更新的余弦相似度表示为:
8、
9、其中,分别表示无人机k、无人机k′在全局模型参数w下的梯度;<·,·>表示向量的点积,而‖·‖表示向量的范数。
10、进一步的,构建目标函数获取处于静止状态的无人机集群的过程表示为:
11、
12、约束条件:
13、
14、
15、
16、
17、
18、其中,f(wm)表示一个簇中第m个无人机的损失函数;r表示预算时间中完成的全局轮数;m表示无人机模型的集合;w*表示最优无人机模型集合;ωr表示第r轮参与者的选择集;t[r]表示每一轮训练的最大等待时间;表示最优损失函数;∈损失函数与最优损失函数之间的差距阈值;tr(ωr)表示第r轮训练时间;ttot表示预计的整个训练时间;[r]表示总训练回合数;表示第k个无人机总时间预算;k表示无人机的集合;tr表示服务器截止时间;二进制变量表示无人机被选择为1,不被选择为0;表示第k个无人机上传所需的时间;表示第k个无人机本地计算时间;表示边缘计算服务器分发模型给无人机k所需的时间;|ωr|表示第r轮选择集参与者个数;n表示子信道数量。
19、进一步的,从处于静止状态的无人机集群中根据无人机的延迟确定参与模型更新的无人机集合时,初始化一个空集作为参与模型更新的无人机集合,根据无人机更新的时延从处于静止状态的无人机集群中选择无人机加入参与模型更新的无人机集合,选择过程包括:从处于静止状态的无人机集群中选择一个时延最小的无人机,若选择的无人机的时延与参与模型更新的无人机集合中所有无人机的累计时延之和小于簇时延要求,则将改无人机加入最优无人机更新集合,并将该无人机移出无人机集合,继续从无人机集合中选择无人机,直到选择的无人机的时延与最优无人机更新集合所有无人机的累计时延之和不小于簇时延要求,输出此时的最优无人机更新集合,其中无人机的时延包括无人机上传模型参数到服务器所需时间、服务器将模型分发到无人机的所需时间以及无人机训练本地模型所需的时间。
20、进一步的,无人机进行集群联邦学习的过程包括:
21、
22、其中,表示第个r簇中第k个无人机在第t轮更新的模型参数;表示表示第个r簇中第k个无人机在第t-1轮更新的模型参数;η为模型的学习率;表示模型参数为损失函数为lr,k时簇内模型的梯度;lr,k表示第个r簇中第k个无人机的损失函数。
23、进一步的,云端将收集的模型参数更新全局模型参数的过程包括:
24、
25、其中,w(t+1)为云端第t+1轮更新得到的全局模型参数;n为参与模型更新无人机数量总和;r为无人机簇的数量;k为每个簇内无人机的数量;θr,k为第个r簇中第k个无人机权重,该权重为根据当前客服端数量在总数据量中的占比计算,当前客服端数据量占比越多,该权重值越大。
26、进一步的,无人机收到全局模型参数后,无人机利用本地数据对模型进行训练的过程表示为:
27、
28、其中,fk(w(t),dk)表示无人机k基于第t轮的全局模型参数w(t)及其本地数据集dk计算的损失函数;|dk|为无人机k本地数据集中样本的数量;fi(w(t))为对于数据样本i的本地损失函数。
29、进一步的,训练停止条件包括:
30、当当前全局模型参数与上一轮的模型参数之差的绝对值小于设定阈值时,停止迭代
31、和/或当第t次迭代的全局模型参数在验证集中的准确率与前n轮迭代的全局参数在验证集中的准确率之差小于设定阈值时,停止迭代
32、和/或当达到最大训练时间,停止迭代。
33、本发明研究了在无人机作为空中用户的情境下,分布式智能方法的应用,鉴于无人机网络在智能化、效率化以及数据隐私保护方面的迫切需求,构建了一个支持多无人机网络的联邦学习框架;为了优化模型的精度,本发明采用了一种基于聚类的方法,将无人机分簇,以促进模型的个性化和差异化学习,此外,还提出了一种基于模型余弦相似度的策略,以解决无人机作为空中用户时设备异构性可能带来的负面影响,通过在考虑能源和带宽限制的前提下,选择簇内无人机进行训练,显著降低了无人机的运行成本,并加速了全局模型的收敛过程,从而在保障数据隐私的同时,提升了整个无人机网络的智能化和效率化水平。
- 还没有人留言评论。精彩留言会获得点赞!