一种基于平行驾驶的多路紧急视频时间同步方法、系统及介质与流程
本发明涉及平行驾驶,尤其是涉及一种基于平行驾驶的多路紧急视频时间同步方法、系统及介质。
背景技术:
1、在平行驾驶系统的应用过程中,车辆的运行状态情况会被传输到监管平台上,其中就包括车辆在发生紧急情况时,会触发车辆前后左右室内等的紧急视频,然后会把各路紧急视频上传到监管平台供调阅查看,当多路紧急视频在监管平台播放的时候,要求各路视频的播放起始时间和播放结束时间是一致,由此判定在发生紧急事件时,某一时间点发生了什么事情,因为涉及到多路h264编码视频数据的文件保存,每路视频数据的需要提前缓存下来,然后再写入到文件中去,在对保存下来的文件进行播放的时候,会发现几个通道的视频文件播放起始时间并不一致,相差好几秒的,甚至达到十几秒。
技术实现思路
1、鉴于以上问题,本发明提供了一种基于平行驾驶的多路紧急视频时间同步方法、系统及介质,不仅解决现有上传到监管平台的紧急视频播放时间不同步的问题,而且不需要在第三方平台重新对多路视频进行解码,视频起始时间对齐,编码的处理。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
3、一种基于平行驾驶的多路紧急视频时间同步方法,所述方法包括:
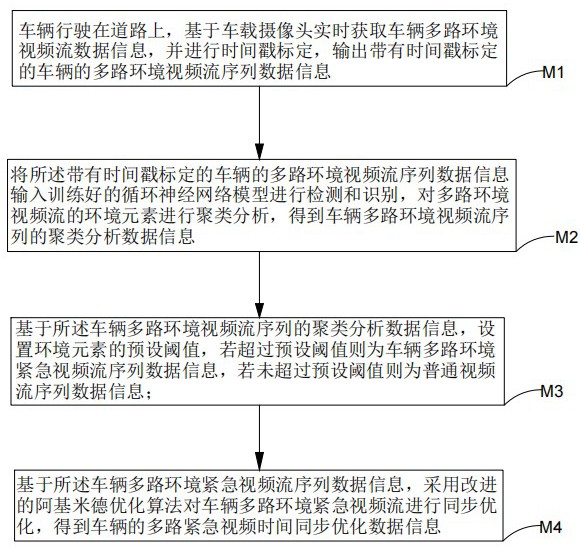
4、m1.车辆行驶在道路上,基于车载摄像头实时获取车辆多路环境视频流数据信息,并进行时间戳标定,输出带有时间戳标定的车辆多路环境视频流序列数据信息;
5、m2.将所述带有时间戳标定的车辆多路环境视频流序列数据信息输入训练好的循环神经网络模型进行检测和识别,对多路环境视频流的环境元素进行聚类分析,得到车辆多路环境视频流序列的聚类分析数据信息;
6、m3.基于所述车辆多路环境视频流序列的聚类分析数据信息,设置环境元素的预设阈值,若超过预设阈值则为车辆多路环境紧急视频流序列数据信息,若未超过预设阈值则为普通视频流序列数据信息;
7、m4.基于所述车辆多路环境紧急视频流序列数据信息,采用改进的阿基米德优化算法对车辆多路环境紧急视频流进行同步优化,得到车辆的多路紧急视频时间同步优化数据信息。
8、进一步的,在步骤m1中,所述时间戳标定为基于所述车辆多路环境视频流数据信息,按照时间先后顺序,对视频流的每一帧数据进行时间标定。
9、进一步的,在步骤m2中,所述训练好的循环神经网络模型进行检测识别包括:
10、m21.将所述带有时间戳标定的车辆多路环境视频流序列数据信息划分为训练集和测试集;
11、m22.将所述训练集输入循环神经网络模型进行训练和学习,确定网络参数,建立网络模型的激活函数f,
12、
13、其中,α和β为激活因子,x为训练集,得到训练好的循环神经网络模型;
14、m23.基于所述训练好的循环神经网络模型,输入所述测试集进行检测和识别,对多路环境视频流的环境元素进行聚类分析,得到车辆多路环境视频流序列的聚类分析数据信息。
15、进一步的,所述网络模型的激活函数f中的激活因子α和β的约束条件为,
16、
17、进一步的,在步骤m3中,所述设置环境元素的预设阈值为根据所述车辆多路环境视频流序列的聚类分析数据信息,获取多路环境视频流序列中的环境元素个数,环境元素个数越多,车辆环境复杂,建立阈值函数g,
18、
19、其中,λ0,λ1,λ2,λ3和λ4为常量参数,g为环境元素的个数,确定预设阈值。
20、进一步的,在步骤m4,所述采用改进的阿基米德优化算法对车辆多路环境紧急视频流进行同步优化包括:
21、m41.基于所述车辆多路环境紧急视频流序列数据信息,确定种群数量,对种群中的每个个体进行初始化,得到种群的初始化数据信息;
22、m42.基于所述种群的初始化数据信息,建立种群的适应度函数h,
23、其中,n为种群数量,hi为种群个体,μi为种群的权重系数,η为种群密度,σ为种群的变化因子,得到种群个体的适应度数据信息;
24、m43.基于所述种群个体的适应度数据信息,若任意种群个体的适应度相同则为同步的车辆多路环境紧急视频流,得到车辆的多路紧急视频时间同步优化数据信息。
25、进一步的,所述种群的权重系数μi的约束条件为,
26、
27、所述种群密度η的取值范围为[5,10],所述种群的变化因子的取值范围为[0,1]。
28、为了实现上述目的及其他相关目的,本发明还提供了一种用于实现任一项所述的基于平行驾驶的多路紧急视频时间同步方法的系统,所述系统包括:
29、环境感知模块,用于实时获取车辆多路环境视频流数据信息;
30、聚类分析模块,与所述环境感知模块连接,用于对多路环境视频流的环境元素进行聚类分析;
31、阈值判断模块,与所述聚类分析模块连接,用于设置环境元素的预设阈值,若超过预设阈值则为车辆多路环境紧急视频流序列数据信息,若未超过预设阈值则为普通视频流序列数据信息;
32、视频流同步优化模块,与所述阈值判断模块连接,用于采用改进的阿基米德优化算法对车辆多路环境紧急视频流进行同步优化。
33、进一步的,所述系统还包括预警模块,与所述视频流同步优化模块连接,用于进行预警提醒。
34、为了实现上述目的及其他相关目的,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有被编程或配置以执行任意一项所述的基于平行驾驶的多路紧急视频时间同步方法的计算机程序。
35、本发明具有以下积极效果:
36、1.本发明通过将带有时间戳标定的车辆多路环境视频流序列数据信息输入训练好的循环神经网络模型进行检测和识别,并结合设置环境元素的预设阈值,对视频流进行聚类分析,不仅能够降低数据处理的难度,而且进一步提高数据的同步优化效果。
37、2.本发明采用改进的阿基米德优化算法对车辆多路环境紧急视频流进行同步优化,不仅现有上传到监管平台的紧急视频播放时间不同步的问题,而且不需要在第三方平台重新对多路视频进行解码,视频起始时间对齐,编码的处理。
技术特征:
1.一种基于平行驾驶的多路紧急视频时间同步方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于平行驾驶的多路紧急视频时间同步方法,其特征在于,在步骤m1中,所述时间戳标定为基于所述车辆多路环境视频流数据信息,按照时间先后顺序,对视频流的每一帧数据进行时间标定。
3.根据权利要求1所述的基于平行驾驶的多路紧急视频时间同步方法,其特征在于,在步骤m2中,所述训练好的循环神经网络模型进行检测识别包括:
4.根据权利要求3所述的基于平行驾驶的多路紧急视频时间同步方法,其特征在于:所述网络模型的激活函数f中的激活因子α和β的约束条件为,
5.根据权利要求1所述的基于平行驾驶的多路紧急视频时间同步方法,其特征在于,在步骤m3中,所述设置环境元素的预设阈值为根据所述车辆多路环境视频流序列的聚类分析数据信息,获取多路环境视频流序列中的环境元素个数,环境元素个数越多,车辆环境复杂,建立阈值函数g,
6.根据权利要求1所述的基于平行驾驶的多路紧急视频时间同步方法,在步骤m4,所述采用改进的阿基米德优化算法对车辆多路环境紧急视频流进行同步优化包括:
7.根据权利要求6所述的基于平行驾驶的多路紧急视频时间同步方法,其特征在于:所述种群的权重系数μi的约束条件为,
8.一种用于实现权利要求1-7任一项所述的基于平行驾驶的多路紧急视频时间同步方法的系统,其特征在于,所述系统包括:环境感知模块,用于实时获取车辆多路环境视频流数据信息;
9.根据权利要求8所述系统,其特征在于:所述系统还包括预警模块,与所述视频流同步优化模块连接,用于进行预警提醒。
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有被编程或配置以执行权利要求1~7中任意一项所述的基于平行驾驶的多路紧急视频时间同步方法的计算机程序。
技术总结
本发明涉及一种基于平行驾驶的多路紧急视频时间同步方法、系统及介质,所述方法包括:M1.车辆行驶在道路上,基于车载摄像头实时获取车辆多路环境视频流数据信息,并进行时间戳标定,输出带有时间戳标定的车辆多路环境视频流序列数据信息;M2.将所述带有时间戳标定的车辆多路环境视频流序列数据信息输入训练好的循环神经网络模型进行检测和识别,对多路环境视频流的环境元素进行聚类分析,得到车辆多路环境视频流序列的聚类分析数据信息。本发明不仅解决现有上传到监管平台的紧急视频播放时间不同步的问题,而且不需要在第三方平台重新对多路视频进行解码,视频起始时间对齐,编码的处理。
技术研发人员:吕志,戈小中,徐希,于中祥
受保护的技术使用者:东风悦享科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!