机器人测试方法、装置、存储介质和计算机设备与流程
本发明涉及机器人,具体而言,涉及一种机器人测试方法、装置、存储介质和计算机设备。
背景技术:
1、软件测试是一件工作量巨大的工作,包含了大量的重复性操作,在此前提下,自动化测试应运而生。接口自动化测试是自动化测试范畴中较为重要的一种,是站在用户的角度对系统接口进行全面高效持续的检测。随着协作机器人的应用日趋广泛,对机器人配套软件质量提出了更高的要求,相应的接口也同样需要保证其可用性、正确性、可二次开发性,如tcp(transmission control protocol,传输控制协议)接口。在对机器人进行自动化测试的过程中,会与机器人建立通信链路,以tcp协议传输数据,机器人接收数据的接口即为tcp接口。
2、通信领域中对tcp接口进行测试的方法是通过报文转换的方式,将测试需要的消息报文转换为满足tcp接口的报文结构的消息报文。同时,识别出tcp接口与服务端的连接方式,基于该连接方式和满足tcp接口的报文结构的消息报文向服务端发送服务调用请求,以实现对tcp接口进行接口测试。但是传统的tcp自动化测试适用于互联网测试,无法适用于协作机器人,因为机器人和网络系统中的服务端执行控制程序的差异较大,无法完全通过报文来进行检测。
3、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种机器人测试方法、装置、存储介质和计算机设备,以至少解决由于无法自动化地对机器人的tcp接口进行测试造成的对机器人测试效率低的技术问题。
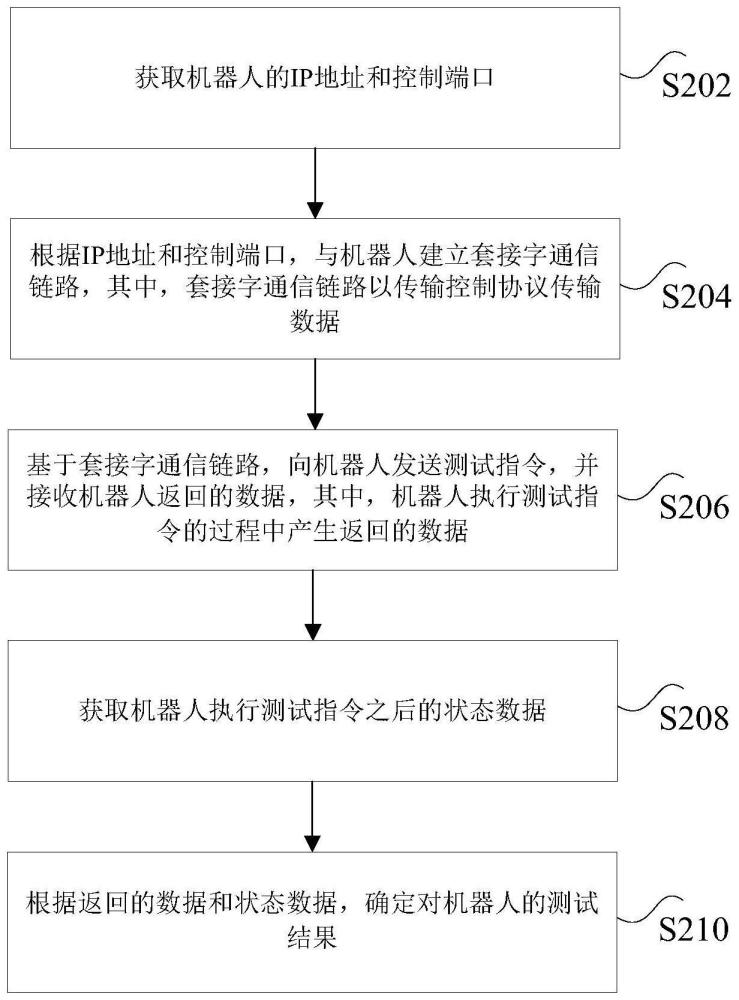
2、根据本发明实施例的一个方面,提供了一种机器人测试方法,包括:获取机器人的ip地址和控制端口;根据ip地址和控制端口,与机器人建立套接字通信链路,其中,套接字通信链路以传输控制协议传输数据;基于套接字通信链路,向机器人发送测试指令,并接收机器人返回的数据,其中,机器人执行测试指令的过程中产生返回的数据;获取机器人执行测试指令之后的状态数据;根据返回的数据和状态数据,确定对机器人的测试结果。
3、可选地,基于套接字通信链路,向机器人发送测试指令,包括:获取测试用例;将测试用例中的下发至机器人的指令作为测试指令;采用传输控制协议,基于套接字通信链路,将测试指令发送至机器人。
4、可选地,基于套接字通信链路,接收机器人返回的数据,包括:接收返回的数据,其中,返回的数据包括以下任意之一:标识成功执行指令的数据,标识函数调用失败的数据,标识执行过程出现错误的数据和错误信息。
5、可选地,根据返回的数据和状态数据,确定对机器人的测试结果,包括:获取测试用例对应的预期返回数据;判断返回的数据与预期返回数据是否匹配;在返回的数据与预期返回数据不匹配的情况下,确定机器人在执行测试指令的过程中存在漏洞的测试结果。
6、可选地,根据返回的数据和状态数据,确定对机器人的测试结果,包括:获取测试用例对应的预期状态数据;判断状态数据与预期状态数据是否匹配;在状态数据与预期状态数据不匹配的情况下,确定机器人在执行测试指令的过程中存在漏洞的测试结果。
7、可选地,根据返回的数据和状态数据,确定对机器人的测试结果,包括:获取测试用例对应的预期状态数据和预期返回数据;判断返回的数据与预期返回数据是否匹配;判断状态数据与预期状态数据是否匹配;在状态数据与预期状态数据匹配,且返回的数据与预期返回数据匹配的情况下,确定机器人执行测试指令的过程不存在漏洞的测试结果。
8、可选地,在向机器人发送测试指令之前,还包括:基于套接字通信链路,向机器人发送获取控制源读取指令,并接收机器人返回的控制源标识;在控制源标识为远程控制端的情况下,向机器人发送测试指令;在控制源标识不为远程控制端的情况下,停止测试,并生成错误提示。
9、根据本发明实施例的另一方面,还提供了一种机器人测试装置,包括:第一获取模块,用于获取机器人的ip地址和控制端口;连接模块,用于根据ip地址和控制端口,与机器人建立套接字通信链路,其中,套接字通信链路以传输控制协议传输数据;测试模块,用于基于套接字通信链路,向机器人发送测试指令,并接收机器人返回的数据,其中,机器人执行测试指令的过程中产生返回的数据;第二获取模块,用于获取机器人执行测试指令之后的状态数据;确定模块,用于根据返回的数据和状态数据,确定对机器人的测试结果。
10、根据本发明实施例的又一方面,还提供了一种非易失性存储介质,非易失性存储介质包括存储的程序,其中,在程序运行时控制非易失性存储介质所在设备执行上述中任意一项机器人测试方法。
11、根据本发明实施例的再一方面,还提供了一种计算机设备,计算机设备包括处理器,处理器用于运行程序,其中,程序运行时执行上述中任意一项机器人测试方法。
12、在本发明实施例中,通过获取机器人的ip地址和控制端口;根据ip地址和控制端口,与机器人建立套接字通信链路,其中,套接字通信链路以传输控制协议传输数据;基于套接字通信链路,向机器人发送测试指令,并接收机器人返回的数据,其中,机器人执行测试指令的过程中产生返回的数据;获取机器人执行测试指令之后的状态数据;根据返回的数据和状态数据,确定对机器人的测试结果,达到了自动化地对机器人的tcp接口进行测试的目的,从而实现了提高机器人测试效率的技术效果,进而解决了由于无法自动化地对机器人的tcp接口进行测试造成的对机器人测试效率低的技术问题。
技术特征:
1.一种机器人测试方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述套接字通信链路,向所述机器人发送测试指令,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述套接字通信链路,接收所述机器人返回的数据,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述返回的数据和所述状态数据,确定对所述机器人的测试结果,包括:
5.根据权利要求2所述的方法,其特征在于,所述根据所述返回的数据和所述状态数据,确定对所述机器人的测试结果,包括:
6.根据权利要求2所述的方法,其特征在于,所述根据所述返回的数据和所述状态数据,确定对所述机器人的测试结果,包括:
7.根据权利要求1至6中任意一项所述的方法,其特征在于,在向所述机器人发送测试指令之前,还包括:
8.一种机器人测试装置,其特征在于,包括:
9.一种非易失性存储介质,其特征在于,所述非易失性存储介质包括存储的程序,其中,在所述程序运行时控制所述非易失性存储介质所在设备执行权利要求1至7中任意一项所述机器人测试方法。
10.一种计算机设备,其特征在于,包括:存储器和处理器,
技术总结
本发明公开了一种机器人测试方法、装置、存储介质和计算机设备。其中,该方法包括:获取机器人的IP地址和控制端口;根据IP地址和控制端口,与机器人建立套接字通信链路,其中,套接字通信链路以传输控制协议传输数据;基于套接字通信链路,向机器人发送测试指令,并接收机器人返回的数据,其中,机器人执行测试指令的过程中产生返回的数据;获取机器人执行测试指令之后的状态数据;根据返回的数据和状态数据,确定对机器人的测试结果。本发明解决了由于无法自动化地对机器人的TCP接口进行测试造成的对机器人测试效率低的技术问题。
技术研发人员:吴为,张远园,邢晓凡,戚祯祥,丁宁
受保护的技术使用者:节卡机器人股份有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!