一种铁路栅栏场景建模和场景视频监控叠加的方法与流程
本发明涉及铁路维护,具体为一种铁路栅栏场景建模和场景视频监控叠加的方法。
背景技术:
1、随着无人机技术的快速发展,其在铁路线路巡检中的应用变得越来越普遍。传统的铁路巡检主要依赖于人工视察,这种方式不仅耗时耗力,而且在一些难以接近的地区难以实施。近年来,使用无人机进行铁路沿线的巡检和监测,尤其是对于铁路防护栅栏的检查,已经成为一种有效的方法。无人机可以快速、高效地在低空飞行,采集沿线的遥感影像,为铁路的安全运营提供支持。
2、现有技术中的缺点:
3、数据管理和处理的复杂性:由于巡检的范围广泛,生成的数据量大,如果没有有效的数据管理系统,很容易导致数据混乱或丢失。
4、影像精度和分辨率限制:传统的遥感影像可能在分辨率和精度上有限制,尤其是在复杂地形或气候条件下。
5、三维建模和分析的技术挑战:将二维影像转换为三维模型需要复杂的处理,且在精确性和实时性方面可能存在挑战。
技术实现思路
1、针对现有技术的不足,本发明提供了一种铁路栅栏场景建模和场景视频监控叠加的方法,以解决上述背景技术中提出的问题。
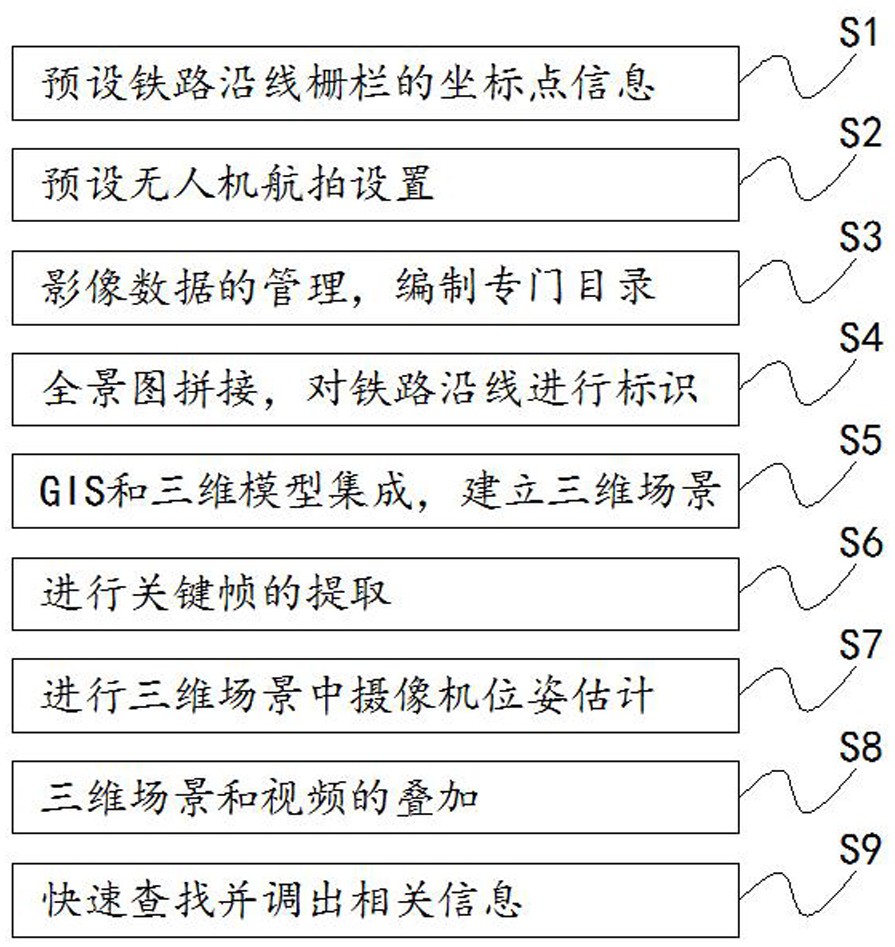
2、为实现上述目的,本发明提供如下技术方案:一种铁路栅栏场景建模和场景视频监控叠加的方法,包括以下步骤:
3、s1、预设无人机所航拍铁路沿线栅栏的坐标点信息;
4、s2、预设无人机航拍设置;
5、s3、进行影像数据的管理,编制专门目录;
6、s4、进行全景图拼接,对铁路沿线进行标识;
7、s5、将gis和三维模型集成,建立三维场景;
8、s6、进行关键帧的提取,通过对比分析相邻帧颜色、亮度、纹理的特征值的差异来确定关键帧;
9、s7、进行三维场景中摄像机位姿估计;
10、s8、通过cesium实现视频画面至三维场景映射,在cesium环境下完成三维场景和视频的叠加;
11、s9、输入铁路k里程后可快速查找防护栅栏位置,同时点击防护栅栏三维影像图快速调出该处栅栏的相关信息。
12、进一步优化本技术方案,所述步骤s2中,无人机航拍设置包括:
13、倾斜角度:设置无人机摄像头的倾斜角度在45°至55°之间,以获得最佳的拍摄效果;
14、飞行参数:选择飞行高度为150m,起飞点距离铁路沿线栅栏280m,飞行区距离铁路沿线栅栏的相对最近距离为180m;
15、航拍参数:在各个坐标点信息上执行低空航拍,避免飞越或靠近铁路线路,收集铁路沿线防护栅栏的遥感影像。
16、进一步优化本技术方案,所述步骤s3中,编制专门目录时,为每次航拍任务创建一个详细的目录,包括航拍日期、时间、地点、无人机飞行高度的信息;
17、其中,地点信息以铁路里程进行标记;
18、所述目录名称设置为(xx线xxkm+xxm-xxkm+xxm(xx年xx月xx日xx米高))。
19、进一步优化本技术方案,所述步骤s1和s2中,还包括航拍规划与坐标点设置的优化处理,使用genetic algorithm算法来优化无人机最佳的航拍坐标点,优化算法如下式所示:
20、[\text{minimize}\sum_{i=1}^{n}d(p_i,p_{i+1})]
21、其中,(d(p_i,p_{i+1}))表示点(p_i)和(p_{i+1})之间的距离,(n)是总的坐标点数。
22、进一步优化本技术方案,所述步骤s4中,使用3米至200米间隔连续拍摄的方法,对重点区段进行密集拍摄,然后将这些图片进行全景拼接,形成铁路沿线的全景图;并对铁路沿线防护栅栏所处地形地貌、栅栏位置、河流、坡面、山体、周边建筑物进行标识;
23、基于坐标变换模型来调整和拼接图像,模型形式如下式所示:
24、[\begin{bmatrix}x'\y'\end{bmatrix}=\begin{bmatrix}a&b\c&d\end{bmatrix}\begin{bmatrix}x\y\end{bmatrix}+\begin{bmatrix}e\f\end{bmatrix}]
25、其中,((x,y))是原始坐标,((x',y'))是变换后的坐标,矩阵元素(a,b,c,d)和偏移量(e,f)由图像匹配算法确定。
26、进一步优化本技术方案,所述步骤s6中,基于视频内容分析的关键帧提取技术,根据各图像间颜色差异提取视频关键帧,将rgb色彩空间转为hsv色彩空间,通过计算特征量hsv进行关键帧的提取;
27、其中,关键帧提取的算法流程包括:
28、1)输入视频,提取视频的每1帧图像vi(i=1,2,3,…,n);
29、2)选取第1帧图像作为关键帧vkey,即vkey=v1;
30、3)依次用后续帧图像vi,vi从i=2开始与关键帧vkey做差,当差值超过所设阈值时,该后续帧再次选取为关键帧;后面的帧图像再与最近选取的关键帧vkey做比较,2帧图像差值小于原先设定的阈值,则不做任何处理,继续进行下一个帧图像;
31、4)按上述流程依次完成差值比较,直至整个提取过程结束。
32、进一步优化本技术方案,所述步骤s7中,进一步包括:
33、通过将镜头参数引入到旋转矩阵影像中进行外方位元素计算;根据欧拉旋转定理,当旋转角度为0时推出旋转矩阵其余2个特征值,求得三维旋转迹数,据此计算三维旋转的旋转角,通过旋转角来确定三维旋转矩阵;
34、假设像点在像空间辅助坐标系和像空间坐标系中坐标分别为(x,y,z)和(x,y,-f),正交变换如下:
35、
36、
37、由公式(3)可知,进行2个空间直角坐标系变换必须确定正交矩阵r,像空间坐标系看成由像空间辅助坐标系相应坐标轴依次旋转φ、ω、κ角度所得,旋转矩阵r表达如下:
38、
39、把rω,rκ的乘积结果列出后,可得:
40、
41、
42、
43、b1=cosωsinκ
44、b2=cosωcosκ
45、
46、
47、
48、ω=-arcsin(b3)
49、
50、假设以y轴为主轴转换系统的坐标转换:
51、
52、由上式可知,根据影像姿态角元素φ、ω、k可计算相应方向余弦,推算出正交矩阵r实现坐标系转换;同理,也可以根据各方向余弦求得影像的3个姿态角。
53、进一步优化本技术方案,在进行外方位元素计算时,根据欧拉旋转定理,当旋转角度为0时推出旋转矩阵其余2个特征值,求得三维旋转迹数,据此计算三维旋转的旋转角,通过旋转角来确定三维旋转矩阵。
54、进一步优化本技术方案,所述步骤s7中,进一步包括:
55、进行角姿态元素计算:在右手坐标系下,无人机摄像头的相机旋转角度可以通过角姿态元素计算,具体包括绕x轴的俯仰角(pitch)、绕y轴的偏航角(yaw)、以及绕z轴的翻滚角(roll);
56、绕x轴的俯仰角,表示相机绕x轴的旋转;在右手坐标系下,正值表示向上旋转,计算时可以使用反正切函数;
57、绕y轴的偏航角,表示相机绕y轴的旋转;在右手坐标系下,正值表示向右旋转,计算时同样可以使用反正切函数;
58、绕z轴的翻滚角,表示相机绕z轴的旋转;在右手坐标系下,正值表示顺时针旋转,计算时同样可以使用反正切函数;
59、相机旋转矩阵的计算,将俯仰角、偏航角和翻滚角组合成相机的旋转矩阵,矩阵表示相机在三维场景中的姿态。
60、进一步优化本技术方案,将俯仰角、偏航角和翻滚角组合成相机的旋转矩阵,所述相机旋转矩阵为:
61、
62、与现有技术相比,本发明提供了一种铁路栅栏场景建模和场景视频监控叠加的方法,具备以下有益效果:
63、1、该铁路栅栏场景建模和场景视频监控叠加的方法,通过采用预设坐标及倾角的方法,可实现无死角自动拍摄,编制专门目录加以区别,避免造成影像处理时不同任务范围照片混杂,空三运算出现错误等意外导致数据全部丢失等情况。
64、2、该铁路栅栏场景建模和场景视频监控叠加的方法,通过设置将视频和关键帧图像以标签形式贴合到三维场景中,利用镜头参数解算外方位元素进行位姿估计,对视频进行处理后,将视频与提取的视频关键帧图像投射至相应位置,提升工作效率,精准高效地提取所需信息,实现铁路栅栏的高效管理。
- 还没有人留言评论。精彩留言会获得点赞!