一种自主探索的救援机器人运动控制系统
本发明涉及机器人控制,更具体的说是涉及一种自主探索的救援机器人运动控制系统。
背景技术:
1、随着科技的发展,机器人已经广泛应用于各个领域。除了能够节约人力成本,机器人还能够应用于特殊环境探索等会损害人身安全的场景。救援机器人就是其中的一种,救援机器人应用于地震、火灾、爆炸以及矿难等灾害现场,这些灾害现场存在许多可能危害救援人员安全的因素,而救援机器人则可以配合搜救人员进行探索,辅助完成搜救工作。现有的机器人控制采用嵌入式控制系统,通过远程的控制中心处理机器人采集的数据,通过人工操控的方式发送控制信号至机器人实现机器人的运动控制,然而,这种方式需要较为稳定的网络环境,在救援机器人主要工作的灾害场景中,网络并不能够一直保持稳定,偶尔出现的网络波动就会导致探索效率变低从而导致救援效率变低。因此,如何提供一种自主探索的救援机器人运动控制系统是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种自主探索的救援机器人运动控制系统,通过微型处理设备对采集的数据进行处理以及行进路线规划,实现救援机器人的自主探索定位,避免了因网络传输问题导致的救援机器人无法开展救援工作。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种自主探索的救援机器人运动控制系统,包括以下部分:
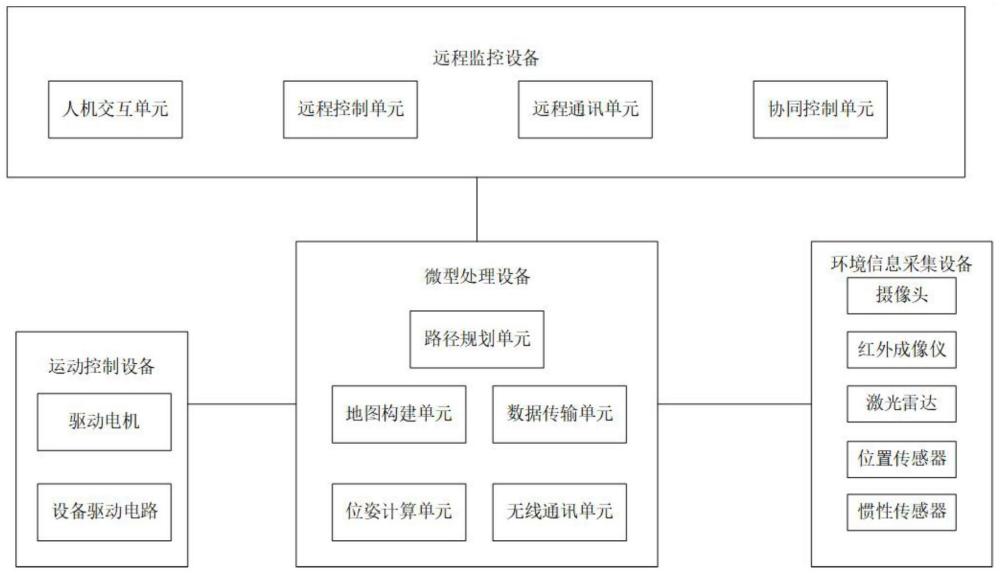
4、环境信息采集设备,设置在救援机器人上,用于采集救援机器人周围的视频画面信息和环境感知信息;
5、运动控制设备,设置在救援机器人上,通过驱动救援机器人的行进机构控制救援机器人的行进;
6、微型处理设备,设置在救援机器人上,用于处理环境信息采集设备采集的数据以及生成运动控制设备的驱动信号;
7、远程监控设备,与微型处理设备无线通讯连接,用于远程监控救援机器人以及发送手动操控信号。
8、可选的,环境信息采集设备包括摄像头、红外热成像仪、激光雷达、位置传感器和惯性传感器;摄像头采集救援机器人周围的视频画面信息,红外成像仪采集救援机器人周围的红外成像画面,激光雷达采集救援机器人周围的三维点云数据,位置传感器采集救援机器人的位置信息,惯性传感器采集救援机器人的三维位姿信息。
9、可选的,微型处理设备包括数据传输单元、无线通讯单元、地图构建单元、位姿计算单元和路径规划单元;数据传输单元接收环境信息采集设备采集的数据,无线通讯单元与远程监控设备进行无线通讯,传输数据以及控制信号,地图构建单元构建救援机器人的工作场景地图,位姿计算单元计算救援机器人的实时位姿,路径规划单元规划救援机器人的行进路线。
10、可选的,无线通讯单元向远程监控设备发送的上行数据包括机器人周围的视频画面信息、机器人的实时位姿和工作场景地图,无线通讯单元接收的下行数据包括远程控制信号和下行优先信号,当无线通讯单元接收到下行优先信号后,暂时停止上行数据的传输,待下行数据传输完毕后,无线通讯单元继续发送上行数据至远程监控设备。
11、可选的,远程监控设备包括人机交互单元、远程控制单元和远程通讯单元;人机交互单元用于手动输入控制信息,查看救援机器人采集的视频画面信息、工作场景地图和实时位姿信息,远程控制单元用于生成远程控制信号,远程通讯单元用于接收微型处理设备的数据以及发送远程控制信号。
12、可选的,远程监控设备还包括协同控制单元,协同控制单元为多台救援机器人分配不同的任务,救援机器人内微型处理设备的路径规划单元基于自身的任务和工作场景地图规划自身的行进路线。
13、可选的,运动控制设备包括驱动电机和设备驱动电路,设备驱动电路基于设备控制信号控制驱动电机的工作从而实现救援机器人的运动控制。
14、经由上述的技术方案可知,与现有技术相比,本发明提供了一种自主探索的救援机器人运动控制系统,具有以下有益效果:本发明通过设置在救援机器人上的微型处理设备对采集的数据进行处理以及行进路线规划,实现了救援机器人的自主探索定位,通过远程控制设备进行监控以及辅助控制,当网络出现波动时,救援机器人仍然能够进行自主探索,等待网络恢复后再将采集的数据传输至远程控制中心,避免了因网络传输问题导致的救援机器人无法开展救援工作的问题;当多台救援机器人同时工作时,本发明远程监控设备对不同的救援机器人分配不同的探索任务,救援机器人基于自身的探索任务规划行进路线,避免机器人自主规划探索路线时重复探索的情况,提高了救援的探索效率。
技术特征:
1.一种自主探索的救援机器人运动控制系统,其特征在于,包括以下部分:
2.根据权利要求1所述的一种自主探索的救援机器人运动控制系统,其特征在于,环境信息采集设备包括摄像头、红外热成像仪、激光雷达、位置传感器和惯性传感器;摄像头采集救援机器人周围的视频画面信息,红外成像仪采集救援机器人周围的红外成像画面,激光雷达采集救援机器人周围的三维点云数据,位置传感器采集救援机器人的位置信息,惯性传感器采集救援机器人的三维位姿信息。
3.根据权利要求1所述的一种自主探索的救援机器人运动控制系统,其特征在于,微型处理设备包括数据传输单元、无线通讯单元、地图构建单元、位姿计算单元和路径规划单元;数据传输单元接收环境信息采集设备采集的数据,无线通讯单元与远程监控设备进行无线通讯,传输数据以及控制信号,地图构建单元构建救援机器人的工作场景地图,位姿计算单元计算救援机器人的实时位姿,路径规划单元规划救援机器人的行进路线。
4.根据权利要求3所述的一种自主探索的救援机器人运动控制系统,其特征在于,无线通讯单元向远程监控设备发送的上行数据包括机器人周围的视频画面信息、机器人的实时位姿和工作场景地图,无线通讯单元接收的下行数据包括远程控制信号和下行优先信号,当无线通讯单元接收到下行优先信号后,暂时停止上行数据的传输,待下行数据传输完毕后,无线通讯单元继续发送上行数据至远程监控设备。
5.根据权利要求3所述的一种自主探索的救援机器人运动控制系统,其特征在于,远程监控设备包括人机交互单元、远程控制单元和远程通讯单元;人机交互单元用于手动输入控制信息,查看救援机器人采集的视频画面信息、工作场景地图和实时位姿信息,远程控制单元用于生成远程控制信号,远程通讯单元用于接收微型处理设备的数据以及发送远程控制信号。
6.根据权利要求5所述的一种自主探索的救援机器人运动控制系统,其特征在于,远程监控设备还包括协同控制单元,协同控制单元为多台救援机器人分配不同的任务,救援机器人内微型处理设备的路径规划单元基于自身的任务和工作场景地图规划自身的行进路线。
7.根据权利要求1所述的一种自主探索的救援机器人运动控制系统,其特征在于,运动控制设备包括驱动电机和设备驱动电路,设备驱动电路基于设备控制信号控制驱动电机的工作从而实现救援机器人的运动控制。
技术总结
本发明公开了一种自主探索的救援机器人运动控制系统,应用于机器人控制技术领域。包括以下部分:环境信息采集设备,用于采集救援机器人周围的视频画面信息和环境感知信息;运动控制设备,通过驱动救援机器人的行进机构控制救援机器人的行进;微型处理设备,用于处理环境信息采集设备采集的数据以及生成运动控制设备的驱动信号;远程监控设备,与微型处理设备无线通讯连接,用于远程监控救援机器人以及发送手动操控信号。本发明通过设置在救援机器人上的微型处理设备对采集的数据进行处理以及规划,实现了救援机器人的自主探索定位,通过远程控制设备进行监控以及辅助控制,避免了因网络传输问题导致的救援机器人无法开展救援工作的问题。
技术研发人员:罗欢,龙慧,黄长征
受保护的技术使用者:韶关学院
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!