一种基于通信感知一体化设备的声音采集方法
本发明涉及声音采集,特别涉及一种基于通信感知一体化设备的声音采集方法。
背景技术:
1、声音信号在我们的日常生活中扮演着重要的角色,在社交和商业通信中越来越流行,并且在军事领域的隐私保护、人机交互等应用中发挥着巨大作用。
2、虽然,在万物互联的当下出现了丰富多彩的声音采集技术手段,但这些手段都存在或多或少的缺陷。如传统的麦克风存在作用距离近、响应带宽窄、抗干扰能力差等问题,而且当使用场景中存在多个声源或者使用场景在较大范围空间内时,无法对目标声源进行高质量采集;喉部麦克风和骨传导麦克风需要直接与音源进行接触,因此无法在远距离的情况下使用;视觉麦克风以及多普勒测振仪(ldv)这类光学麦克风对周围环境的光照要求很高,难以保护用户的隐私,而且设备价格昂贵。
3、综上所述,现阶段的声音采集方案无法满足大范围、多音源复杂场景下的声音信号采集。
技术实现思路
1、为解决上述技术问题,本发明提供了一种基于通信感知一体化设备的声音采集方法,可以在正常通信的同时,对不同距离、不同角度以及多音源复杂环境下的音源信息进行高质量采集。
2、为实现上述技术目的,本发明采用如下技术方案:
3、一种基于通信感知一体化设备的声音采集方法,包括:
4、通信感知一体化设备b接收多条路径上的fscm信号;
5、所述多条路径上的fscm信号,是指由通信感知一体化设备a对通信数据进行频移chirp调制生成和发射出去,经视距路径和非视距路径而被通信感知一体化设备b接收到的正交多载波信号;fscm信号包括前导信号和载荷信号,载荷信号中嵌有通信符号;
6、通信感知一体化设备b,根据发射端的参考信号和接收到的前导信号,对各条非视距路径上的物体进行定位;
7、通信感知一体化设备b,对从各条非视距路径反射的fscm信号进行慢时间采样和快速傅里叶变换得到相位变化,然后利用相位变化得到振动位移,再根据振动位移的峰度区分干扰物体与声源目标;由于声音是由振动产生的,物体振动的频率等于物体振动发出的声波的频率,物体振动的振幅决定了物体振动发出的声波的大小;因此,可以将连续时间内测量得到的振动位移变化视为该时间段内采集到的声音信息;
8、通信感知一体化设备b,对采集到的声音信号进行多域联合降噪;并对从视距路径接收的fscm信号进行解复用和解调,得到通信符号。
9、进一步的,所述载荷信号,通过在chirp信号的基础上嵌入通信符号得到,表达式给出为:
10、
11、其中,st(t)为,a为通信符号,为嵌入通信符号a所产生的载波频率偏移量,为嵌入通信符号a所产生的折叠时间分界线,将信号分为上式两个部分,sf是扩频因子,b为信号的带宽,t为信号的时间长度,即每个通信符号的调制位数。
12、进一步的,所述对各条非视距路径上的物体进行定位,包括确定各物体相对于通信感知一体化设备b的距离和方位角。
13、进一步的,通信感知一体化设备b,对各物体相对于通信感知一体化设备b的距离确定方法为:
14、步骤a1,设每个目标物体对通信感知一体化设备a发射的fscm信号反射到通信感知一体化设备b,构成一条非视距路径;
15、步骤a2,生成参考信号s(t),将其与接收到的前导信号r(t)共轭相乘得到信道的频率响应;
16、步骤a3,以采样时间tl/l对信道的频率响应进行采样,形成二维时频响应;
17、步骤a4,将二维时频响应进行辛傅里叶变换,得到信道的时延多普勒域响应h(δτ,v),在时延多普勒域上计算最值得到第p条路径的相对时延以及径向多普勒信息(δτ,v)p:
18、(δτ,v)p=argmax(|h(δτ,v)|)
19、其中,δτ、v分别表示相对时延和径向多普勒;
20、步骤a5,根据已知的视距路径长度s计算视距路径时延进而计算各条非视距路径的路径时延为得到各条非视距路径的路径长度其中δτp、lp分别表示第p条非视距路径的相对时延、实际时延和路径长度;
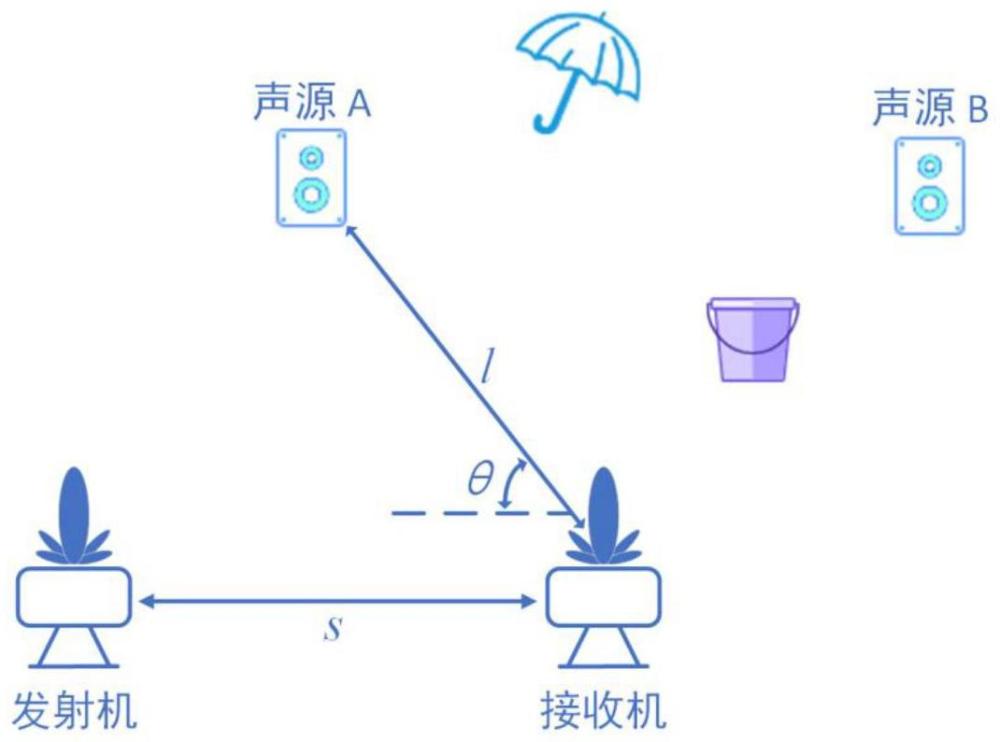
21、步骤a6,根据通信感知一体化设备b、目标物体、通信感知一体化设备a形成的三角几何关系,得到反射物体相对于通信感知一体化设备b的距离l为:
22、
23、其中,θ为目标物体相对于通信感知一体化设备b的方位角,即通信感知一体化设备b分别至目标物体、通信感知一体化设备a所形成两条直线的夹角。
24、进一步的,各物体相对于通信感知一体化设备b的方位角确定方法为:
25、设通信感知一体化设备b的均匀线性天线中每相邻两个天线的间距d,天线数量为m,反射fscm信号的物体数量为p,第p个反射物体的方位角为θp,p<m;
26、基于相邻两个接收天线之间接收的反射信号存在固定的时间差将第m个天线在t时刻最终接收到的第p个物体的反射信号ump(t)表示为:
27、
28、将第m个接收天线上接收到的所有反射信号xm(t)表示为:
29、
30、将所有m个接收天线的反射信号表示为如下矢量形式:
31、
32、将上式表示为矩阵形式:
33、x(t)=au(t)+n(t)
34、其中n(t)=[n1(t) n2(t) … nm(t)]h是噪声信号的矢量形式,u(t)为入射信号矢量形式,即所有p个物体的反射信号的矢量形式;a为方向矩阵,表示为
35、a=[a(θ1) a(θ2) ... a(θp)]
36、接收信号的协方差矩阵rp写作:
37、
38、式中为第p个反射信号的功率,为噪声信号的功率,i为m×m的单位矩阵;
39、对协方差矩阵rp进行l次采样得到样本协方差矩阵rx为:
40、
41、将样本协方差矩阵rx进行特征值分解,得到m个降序排列的特征值η1≥η2≥…≥ηm;前p个特征值对应入射信号,后m-p个信号对应噪声信号分量;假设噪声为常量,则协方差矩阵分解为:
42、
43、式中,∧p是由前p个特征值η1、η2、…、ηp构成的对角矩阵,up是信号特征向量构成的向量矩阵,∧n为由后(m-p)个特征值ηp+1、ηp+2、…、ηm构成的对角矩阵,un为噪声对应的特征向量矩阵;
44、上式进一步改写成:
45、
46、其中v是任意整数,且小于1,当v接近无穷大时,上式收敛到噪声子空间;基于此,得到:
47、
48、由上式得到:对于任意目标物体,当入射角度θ→θm时,因此,获得反射物体的空间谱函数pm-capon(θ):
49、
50、其中,a(θ)表示来自θ方向的方向向量,[]h表示转置;当θ→θm时,空间谱函数会在目标物体处形成极大值,故取空间谱函数峰值对应的角度即为反射物体的方位角信息。
51、进一步的,所述利用相位变化得到振动位移,计算公式如下:
52、
53、其中,d是振动位移,是相位变化,λ是毫米波信号的波长。
54、进一步的,振动位移的峰度计算公式如下:
55、
56、其中,ks表示振动位移信号的峰度,di表示第i个采样点的振动位移,为振动位移的平均值,n表示振动位移信号长度;
57、若计算得到的峰度ks大于设定的阈值,则将其视为声源目标,否则视为干扰物体。
58、进一步的,所述对采集到的声音信号进行多域联合降噪,包括:
59、步骤b1,波束赋形:利用加权系数调整采集到的声音信号的幅度和相位,得到天线阵列输出为:
60、
61、式中,z(t)为天线阵列输出,w*为加权系数,w为加权矩阵;dmp(t)表示第m根接收天线接收到的第p个物体的反射信号,d(t)为各天线采集到的声音信号的矩阵形式;其中加权系数矩阵w的确定方法为:
62、将天线阵列输出的声音信号z(t)的功率pout表示为:
63、pout=e[|z(t)|2]=whe[d(t)d(t)h]w=whrw
64、其中,r表示输出信号的协方差矩阵,lcmv波束赋形目标在于保持期望方向的信号增益恒定的同时让输出功率pout最小,其约束条件如下:
65、
66、s.t.whc=f
67、其中,其中c是约束矩阵,f是约束响应向量;为了让最大增益在期望方向,其他已知方向上实现置零,即c=[a(θ1) a(θ2) … a(θp)],f=[1 0 ... 0]t;再通过拉格朗日乘数法,即得到加权系数矩阵w如下:
68、
69、步骤b2,波束赋形后的声音信号z(t)转移至频域z(ω),使用谱减法进一步降噪:将其他方向上的振动位移信息视作噪音,并与波束赋形后的天线增益相结合,从而实现空频域上的联合降噪,获得更加清晰的声音信号,多域联合降噪后的频谱|v(ω)|2如下:
70、
71、其中,视场中有p个物体,|z(ω)|2表示波束赋形后的频谱,|zp(ω)|2表示第p个物体振动位移的频谱,μp表示第p个物体所在方向的天线增益与目标所在方向的天线增益的比值。
72、进一步的,所述对从视距路径接收的fscm信号进行解复用和解调,包括:
73、首先在通道内根据对应的扩频因子sf生成对应的参考信号g(t),参考信号的形式为载波频率偏移量foffset为0的载荷信号;
74、随后在各通道内,将接收到的载荷信号x(t)与参考信号g(t)的共轭相乘,提取出通道对应的解调信号x(t):
75、x(t)=∫x(t)g*(t)dt
76、对解调信号x(t)进行2sf点的采样后进行dft处理,并取dft图谱峰值即得到通信符号:
77、
78、其中,x(k)是解调信号x(t)进行2sf点采样得到的信号,k是采样点数,dft()表示dft处理。
79、有益效果
80、通过上述提供的基于通信感知一体化设备的声音采集方法,本发明具有如下有益效果:
81、(1)本发明使用通信感知一体化设备,可以精确获取视场中物体的距离角度信息,捕捉它们的振动位移并通过计算峰度来区分目标声源与干扰物体;
82、(2)提出多域联合降噪方法,即将波束赋形后干扰所在方向上的天线增益与目标音源所在方法上的天线增益作为缩放因子进行谱减法,可以降低波束赋形后旁瓣的影响,提高采集到的声音的质量。
83、(3)本发明采用fscm信号来探测振动信号,作用距离长、精度高、成本低廉,而且能够在探测声学振动信号的情况下,实现与其他设备之间的通信。
- 还没有人留言评论。精彩留言会获得点赞!