基站定位方法、电子设备及存储介质
本发明涉及基站定位,尤其涉及一种基站定位方法、电子设备及存储介质。
背景技术:
1、紧急情况下,救援人员的准确定位是至关重要的。为了确保救援人员的位置能够准确确定,布设定位基站和配备应急定位终端是非常有帮助的。定位基站可以用来接收和处理救援人员发出的信号,并将其位置信息传输给指挥中心。同时,救援人员携带的应急定位终端可以发送信号以便被基站识别和定位。
2、超宽带定位系统具有快速传输、穿透能力强、低功率和抗干扰等特点,被广泛应用于救援定位中。然而,狭长型通道内非视距传输严重,这就使得超宽带定位系统在狭长型通道内进行目标定位解算时,解算精度较低。也就是说,狭长型通道内的定位精度较低。
技术实现思路
1、本发明实施例提供了一种基站定位方法、电子设备及存储介质,以解决狭长型通道内的定位精度较低的问题。
2、第一方面,本发明实施例提供了一种基站定位方法,包括:
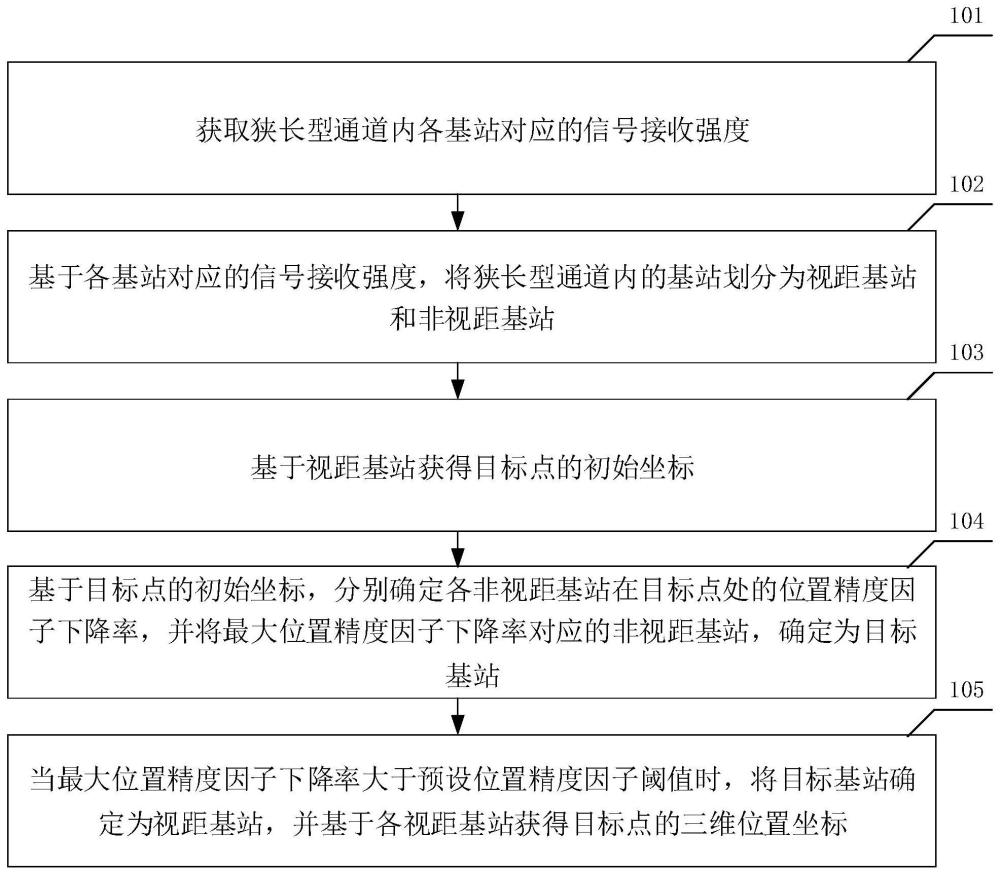
3、获取狭长型通道内各基站对应的信号接收强度;
4、基于各基站对应的信号接收强度,将狭长型通道内的基站划分为视距基站和非视距基站;
5、基于所述视距基站获得目标点的初始坐标;
6、基于所述目标点的初始坐标,分别确定各非视距基站在所述目标点处的位置精度因子下降率,并将最大位置精度因子下降率对应的非视距基站,确定为目标基站;
7、当最大位置精度因子下降率大于预设位置精度因子阈值时,将所述目标基站确定为视距基站,并基于各视距基站获得所述目标点的三维位置坐标。
8、在一种可能的实现方式中,基于所述目标点的初始坐标,分别确定各非视距基站在所述目标点处的位置精度因子下降率,包括:
9、基于所述目标点的初始坐标,计算所述视距基站在所述目标点处的位置精度因子,并将其确定为初始位置精度因子;
10、对于每一个非视距基站,将该非视距基站确定为视距基站,重新执行所述计算所述视距基站在所述目标点处的位置精度因子的步骤,并将计算的位置精度因子确定为该非视距基站对应的实时位置精度因子;
11、基于所述初始位置精度因子和各非视距基站对应的实时位置精度因子,对应计算各非视距基站在所述目标点处的位置精度因子下降率。
12、在一种可能的实现方式中,所述基于所述初始位置精度因子和各非视距基站对应的实时位置精度因子,对应计算各非视距基站在所述目标点处的位置精度因子下降率,包括:
13、根据对应计算各非视距基站在所述目标点处的位置精度因子下降率;
14、其中,δi表示第i个非视距基站在所述目标点处的位置精度因子下降率,hi表示第i个非视距基站对应的实时位置精度因子,h0表示初始位置精度因子。
15、在一种可能的实现方式中,所述基于所述视距基站获得目标点的初始坐标,包括:
16、当视距基站的数量大于或等于第一预设数量时,基于视距基站解算目标点的初始坐标;
17、当视距基站的数量小于所述第一预设数量,且连续跳转次数小于预设次数时,跳转执行所述获取狭长型通道内各基站对应的信号接收强度的步骤,并继续执行后续步骤,更新连续跳转次数。
18、在一种可能的实现方式中,所述方法还包括:
19、当视距基站的数量小于所述所述第一预设数量,且所述视距基站的数量大于所述第二预设数量,且所述连续跳转次数大于或等于所述预设次数时,基于视距基站解算目标点坐标,得到目标点的位置坐标;所述第二预设数量小于所述第一预设数量,所述位置坐标为二维坐标或一维坐标。
20、在一种可能的实现方式中,所述基于各基站对应的信号接收强度,将狭长型通道内的基站划分为视距基站和非视距基站,包括:
21、基于各基站对应的信号接收强度,对应计算各基站对应的信号功率和信号级别;
22、分别计算各基站对应的信号级别与信号功率之间的差值;
23、将差值大于第一预设差值的基站确定为非视距基站,并将差值小于第二预设差值的基站确定为视距基站;所述第一预设差值大于所述第二预设差值。
24、在一种可能的实现方式中,所述方法还包括:
25、当所述最大位置精度因子下降率小于或等于所述预设位置精度因子阈值时,将所述初始坐标确定为目标点的三维位置坐标。
26、在一种可能的实现方式中,在所述获取狭长型通道内各基站对应的信号强度值之前,还包括:
27、根据预设最优基站数量和预设最优基站布局,在所述狭长型通道内进行基站布设。
28、第二方面,本发明实施例提供了一种基站定位装置,包括:
29、获取模块,用于获取狭长型通道内各基站对应的信号接收强度;
30、处理模块,用于基于各基站对应的信号接收强度,将狭长型通道内的基站划分为视距基站和非视距基站;
31、处理模块,还用于基于所述视距基站获得目标点的初始坐标;
32、处理模块,还用于基于所述目标点的初始坐标,分别确定各非视距基站在所述目标点处的位置精度因子下降率,并将最大位置精度因子下降率对应的非视距基站,确定为目标基站;
33、定位模块,用于当最大位置精度因子下降率大于预设位置精度因子阈值时,将所述目标基站确定为视距基站,并基于各视距基站获得所述目标点的三维位置坐标。
34、第三方面,本发明实施例提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
35、第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
36、本发明实施例提供一种基站定位方法、装置、电子设备及存储介质,通过基于狭长型通道内各基站的信号接收强度,将各基站划分为视距基站和非视距基站;通过分别确定各非视距基站在目标点处的位置精度因子下降率,并将最大位置精度因子下降率对应的非视距基站,确定为目标基站;并在最大位置精度因子下降率大于预设位置精度因子阈值时,将目标基站确定为视距基站,基于各视距基站获得目标点的三维位置坐标。其中,通过基于各非视距基站的位置精度因子下降率,可以确定最大位置精度因子下降率的目标基站,并在最大位置精度因子大于预设位置精度因子阈值时,将该目标基站划分为视距基站,并基于各视距基站获得目标点的三维位置坐标,从而可以显著提升目标定位精度。
技术特征:
1.一种基站定位方法,其特征在于,包括:
2.根据权利要求1所述的基站定位方法,其特征在于,基于所述目标点的初始坐标,分别确定各非视距基站在所述目标点处的位置精度因子下降率,包括:
3.根据权利要求2所述的基站定位方法,其特征在于,所述基于所述初始位置精度因子和各非视距基站对应的实时位置精度因子,对应计算各非视距基站在所述目标点处的位置精度因子下降率,包括:
4.根据权利要求1-3任一项所述的基站定位方法,其特征在于,所述基于所述视距基站获得目标点的初始坐标,包括:
5.根据权利要求4所述的基站定位方法,其特征在于,所述方法还包括:
6.根据权利要求1-3任一项所述的基站定位方法,其特征在于,所述基于各基站对应的信号接收强度,将狭长型通道内的基站划分为视距基站和非视距基站,包括:
7.根据权利要求1-3任一项所述的基站定位方法,其特征在于,所述方法还包括:
8.根据权利要求1-3任一项所述的基站定位方法,其特征在于,在所述获取狭长型通道内各基站对应的信号强度值之前,还包括:
9.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上的权利要求1至8中任一项所述基站定位方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上的权利要求1至8中任一项所述基站定位方法的步骤。
技术总结
本发明提供一种基站定位方法、电子设备及存储介质。该方法包括:获取狭长型通道内各基站对应的信号接收强度;基于各基站对应的信号接收强度,将狭长型通道内的基站划分为视距基站和非视距基站;基于视距基站获得目标点的初始坐标;基于目标点的初始坐标,分别确定各非视距基站在目标点处的位置精度因子下降率,并将最大位置精度因子下降率对应的非视距基站,确定为目标基站;当最大位置精度因子下降率大于预设位置精度因子阈值时,将目标基站确定为视距基站,并基于各视距基站获得目标点的三维位置坐标。本发明能够提升狭长型通道内的目标定位精度。
技术研发人员:孙晓云,王硕,陈勇,王子旭,王明明,刘卓伦
受保护的技术使用者:石家庄铁道大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!