复杂高动态海上立体分布式锚链系统及实现方法
本发明涉及海上跨域多无人系统,具体地,涉及复杂高动态海上立体分布式锚链系统及实现方法。
背景技术:
1、目前,跨介质通信时是实现空-海面-海下一体化网络构建的重要研究方向,水上无人船和水下无人船的协作被广泛应用于海洋探测、水下监控网络、空中水下协同搜索与援助,海空一体化协同作战等,但是跨海面的多无人系统的通信问题亟待解决,由于单一信号无法在水中和空中同时保持高效长距离的通信传输,跨介质通信需要穿透空气与海洋两个动态的空间,同时涉及多个信道,同时海上面临着复杂高动态的风浪环境,都会使得跨海面的协同通信变得具有挑战性。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种复杂高动态海上立体分布式锚链系统及实现方法。
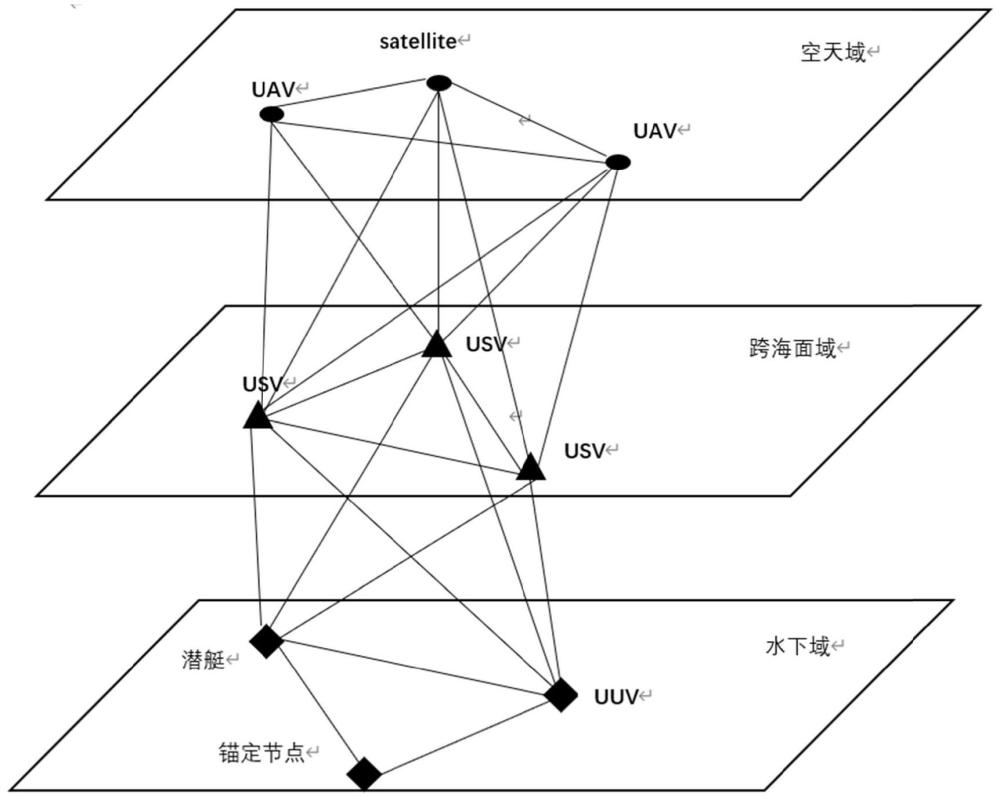
2、根据本发明提供的一种复杂高动态海上立体分布式锚链系统,包括:跨海面通信网络、水下水声通信网络以及空天海水通信网络;
3、基于所述跨海面通信网络、所述水下水声通信网络以及所述空天海水通信网络实现跨海面的海下-跨海面-空天的通信传输,从而实现数据交换和协同作业;
4、所述跨海面通信网络是基于船上锚链通信子系统组建的;
5、所述水下水声通信网络是基于海底锚链通信子系统组建的;
6、所述空天海水通信网络是基于海面与海空通信子系统组建的。
7、优选地,所述船上锚链通信子系统包括:船上锚链通信节点、水声电磁波一体换能器、锚链和连接器;
8、所述跨海面通信网络是基于船上锚链通信节点构建的,基于所述船上锚链通信节点形成可移动的转接通信基站;
9、所述水声电磁波一体换能器是基于水声换能器和电磁波换能器实现水声信号和电磁波信号相互转换,实现跨海面不同介质之间的信息传递以及水下水声网与海面船基通信网络的异构融合;
10、利用所述连接器将船上锚链通信模块与船上锚链连接,并伸缩至预设位置。
11、优选地,所述海底锚链通信子系统包括:基于水下无人系统通信节点和海底锚链通信节点构建的水下水声通信网络;
12、所述海底锚链通信子系统还包括:海底锚、锚链以及浮力控制子系统;
13、利用所述海底锚和锚链固定连接海底锚链通信模块;
14、所述浮力控制子系统,用于将海底锚链通信节点锚定在预设的通信位置。
15、优选地,所述海面与海空通信子系统包括:基于水上船间无线电和空-海面无线电连接各海面上节点构建的;
16、其中,所述各海面上节点包括:携带锚链通信的水上无人船和未携带锚链通信的水上无人船;
17、所述携带锚链通信的水上无人船作为船上锚链通信节点,实现多个水上无人船之间的通信以及水上无人船与水下无人船之间的通信;
18、所述未携带锚链通信的水上无人船基于空天海水通信网络实现水上无人船之间的通信。
19、优选地,所述水下无人系统包括:
20、水下无人系统配置水声通信系统,且水下无人系统作为水下水声通信的多个移动节点,能够与携带船上锚链通信的水上无人船进行水下水声通信,同时能够与海底锚链通信节点进行水声通信;
21、还包括,水下无人系统实时采集水下无人系统在周围预设范围内的环境信息,利用声纳成像探测技术对无人船通信锚链及其链路进行检测与追踪。
22、优选地,当所述跨海面通信网络中某个船上锚链通信节点出现故障时,利用该故障节点周边预设范围内的其他节点重新组建跨海面通信网络结构;当所述水下水声通信网络中的水下无人船通信节点或海底锚链通信节点发生故障时,则利用该故障节点周边预设范围内的其他节点重新组建水下水声通信网络。
23、根据本发明提供的一种复杂高动态海上立体分布式锚链系统实现方法,包括:
24、步骤s1:基于船上锚链通信子系统组建跨海面通信网络;
25、步骤s2:基于海底锚链通信子系统组建水下水声通信网络;
26、步骤s3:基于海面与海空通信子系统组建空天海水通信网络;
27、步骤s4:基于所述跨海面通信网络、所述水下水声通信网络以及所述空天海水通信网络实现跨海面的海下-跨海面-空天的通信传输,从而实现数据交换和协同作业;
28、优选地,所述步骤s1中所述船上锚链通信子系统包括:船上锚链通信节点、水声电磁波一体换能器、锚链和连接器;
29、所述跨海面通信网络是基于船上锚链通信节点构建的,基于所述船上锚链通信节点形成可移动的转接通信基站;
30、所述水声电磁波一体换能器是基于水声换能器和电磁波换能器实现水声信号和电磁波信号相互转换,实现跨海面不同介质之间的信息传递以及水下水声网与海面船基通信网络的异构融合;
31、利用所述连接器将船上锚链通信模块与船上锚链连接,并伸缩至预设位置。
32、优选地,所述步骤s2中所述海底锚链通信子系统包括:
33、基于水下无人系统通信节点和海底锚链通信节点构建的水下水声通信网络;
34、所述海底锚链通信子系统还包括:海底锚、锚链以及浮力控制子系统;
35、利用所述海底锚和锚链固定连接海底锚链通信模块;
36、所述浮力控制子系统,用于将海底锚链通信节点锚定在预设的通信位置。
37、优选地,所述步骤s3中所述海面与海空通信子系统包括:基于水上船间无线电和空-海面无线电连接各海面上节点构建的;
38、其中,所述各海面上节点包括:携带锚链通信的无人船和未携带锚链通信的无人船;
39、所述携带锚链通信的无人船作为船上锚链通信节点,实现多个水上无人船之间的通信以及水上无人船与水下无人船之间的通信;
40、所述未携带锚链通信的无人船基于空天海水通信网络实现水上无人船之间的通信。
41、与现有技术相比,本发明具有如下的有益效果:
42、1、本发明构建了水面无人船异构通信网络,面向海上复杂高动态的恶劣环境,通过一种多路径传输技术,实现了水下水声通信与船间无线电通信进行异构融合,使得当水上无人船舶的一种通信方式的信号接收或传递出现故障时,可以利用另一种方式进行信号的接收或传递,在水平面上,相比于传统的水面船舶单一的无线电通信方式,可以使用相融合的两种通道进行通信,能够有效解决在强涌浪下造成的信号干扰与单一通信方式下设备损坏的低容错率问题,提高了水面无人船舶船间通信的稳定性和可靠性。水面无人船船间通信需要配备抗干扰技术;
43、2、本发明通过分散式的架构技术,将锚链通信系统分别布置在水上无人船、浮标和水下锚定节点上,实现了去中心化的异构通信,通过分布式的锚链系统构建了海上无人系统互联互通的平台,空-海面-水下各个无人系统可以实现频繁的通信和数据交换,为海上无人系统的协同提供了通信基础;
44、3、本发明通过分布式锚链及水下水声通信模块,实现了海洋中不同水层的信息传输和通信,相较于传统系统,能够在海洋环境中更加高效地实现数据传输和通信;
45、4、本发明利用水面无人船、无人机和无人潜航器的联合作业,实现了海上立体分布式锚链系统的多维资源统一调度,提高了资源利用效率和作业灵活性,与传统海洋资源调度方法相比具有更高的智能化和自适应性;
46、5、本发明采用自主可收放的水面上信息传输链,实现了海面广域覆盖,能够有效应对海上复杂环境下的信息传输需求,具有更强的适应性和稳定性,相较于传统海上信息传输方式,具备更高的可靠性和覆盖范围。
47、6、本发明基于网络架构动态自学习、组网链路自修复和信息变化自适应的特性,使得本发明的海上立体分布式锚链系统具备了节点即连即用的能力,极大地简化了系统的部署和维护流程,与传统海上网络系统相比,降低了运维成本并提升了系统的可用性和稳定性。
48、7、本发明的海上立体分布式锚链系统面向海上高动态复杂环境的“海下-跨海面-空天”融合网络具有海天融合系统跨域多维资源统一调度、海面广域覆盖以及网络架构动态自学习、组网链路自修复、信息变化自适应、节点即连即用的特征,探索出一种海面融合的新型接入与传输架构和方法,以满足海上高动态复杂环境下广域智能连接的复杂业务需求。
- 还没有人留言评论。精彩留言会获得点赞!