一种临近空间平台到无人机下行多径信道估计方法
本发明属于临近空间到无人机的下行通信信道估计,特别是涉及一种临近空间平台到无人机下行多径信道估计方法。
背景技术:
1、即将到来的第六代(the sixth generation,6g)通信系统对超可靠、超低时延和超高数据速率提出了前所未有的要求,而第五代(the fifth generation,5g)通信系统却无法很好地满足这些要求。作为5g系统三大支柱服务之一的超可靠低延迟通信(ultra-reliable and low latency communications,urllc)仍将是6g系统的支柱服务。urllc可以支持各种关键任务和应用,包括智能交通系统、自动驾驶、远程医疗、工业自动化、触觉互联网、数字孪生实时控制和元宇宙等。
2、目前,天-空-地一体化通信系统是满足6g系统前所未有要求的关键系统架构之一。由各种临近空间平台(near-space platform,nsp)、低空无人机(unmanned aerialvehicle,uav)组成的临空信息网络是一个能实时获取、传输和处理空间电磁信号的信息网络,它是天-空-地综合通信系统的核心组成部分。
3、除上述空-天-地一体化系统外,可重构智能表面(reconfigurable intelligentsurface,ris)已成为实现6g系统智能无线反射信道的一种极有前途的范例。ris是由许多电磁波无源反射元件组成的平面,每个元件都能单独改变入射电磁信号的振幅和/或相位。部署ris后,发射机和接收机之间的无线信道可以灵活地重新配置,以实现所需的信道状态信息(channel state information,csi)。因此,ris为从根本上解决复杂的电磁信号干扰和信道衰落问题提供了一种新的范式,并有可能显著提高无线通信系统的吞吐量和可靠性。
技术实现思路
1、有鉴于此,本发明提出一种临近空间平台到无人机下行多径信道估计方法,该方法能够有效地捕获nsp到uav下行通信信道的稀疏性,准确地估计信号离开nsp的角度和nsp到uav的信道衰减强度。
2、本发明的技术方案具体如下:
3、一种临近空间平台到无人机下行多径信道估计方法,包括以下步骤:
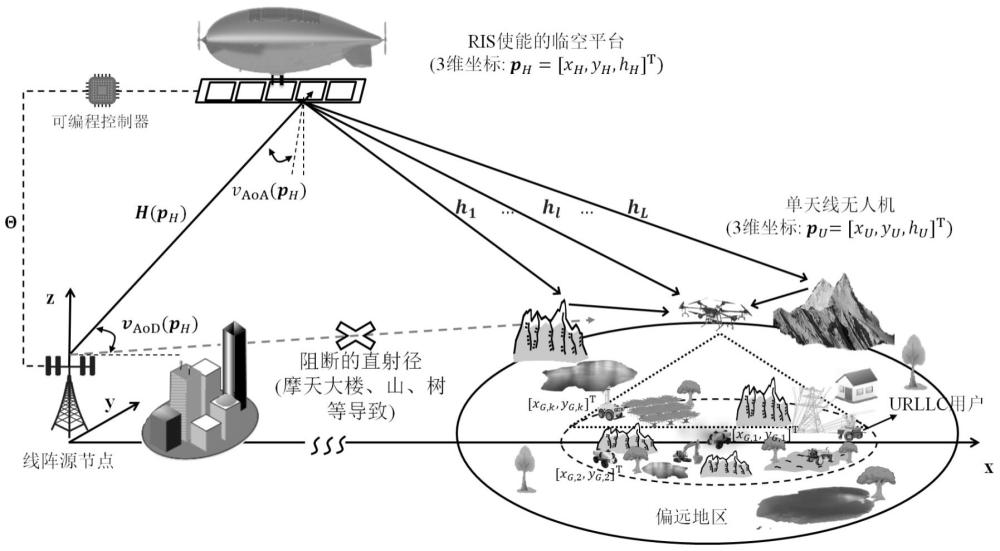
4、步骤s1、构建包括bs、安装ris的nsp、uav和urllc gu的通信系统,其中bs表示基站,ris表示可重构智能表面,nsp表示临近空间平台,uav表示无人机,urllc gu表示地面用户;
5、步骤s2、构建bs到nsp的下行信道模型以及nsp到uav的下行信道模型;
6、其中,bs到nsp的下行信道模型是确定性信道模型,如下式:
7、
8、其中,表示复信道衰落,表示bs的阵列转向向量,表示维度为 n的复向量空间,表示ris的 m维阵列转向向量,上标h表示共轭转置变换,表示bs到nsp的链路的离开角aod,表示nsp的三维空间位置,,,分别为三维空间坐标值,表示bs到nsp的到达角aoa;
9、nsp到uav的下行信道模型是由有限条反射或散射路径组成的非确定性信道模型,如下式:
10、
11、其中,和分别表示第条传播路径的复路径衰落系数和离开角,表示传播路径的总数,,其中表示平均功率;
12、步骤s3、基于nsp到uav下行信道的稀疏特性将所述nsp到uav的下行信道模型转化到角度域进行表示,构建nsp到uav的下行离格信道模型;
13、步骤s4、基于概率论构建信道向量的概率模型;
14、步骤s5、基于压缩感知理论和nsp到uav的下行离格信道模型,构建uav接收信号模型;
15、步骤s6、基于所述uav接收信号模型,采用统计机器学习理论,推导信道参数的后验概率,采用期望最大化方法估计信号离开nsp的方向角,并采用循环最小均方误差估计器估计信道衰减值。
16、优选的,所述步骤s2中,
17、
18、
19、
20、
21、表示ris中无源反射单元的间距,表示虚数单位,表示bs线性阵列天线相邻天线阵元间的间距,表示波长。
22、优选的,和的计算方式如下:
23、
24、。
25、优选的,所述步骤s3中,所述nsp到uav的下行离格信道模型表示为:
26、
27、其中,均匀的角度采样网格,表示第 n个采样点处的角度值,,离格偏移角向量,表示最接近第 n个采样角的一条传播路径上电磁波的传播方向偏离第 n个采样角的大小,表示离格转向矩阵,表示角域稀疏信道向量。
28、优选的,所述步骤s4具体包括:
29、步骤s4-1、将nsp到uav的下行信道向量分解成隐藏信道支持向量和隐藏信道值向量,如下式:
30、
31、其中,分别表示第1至第 n条传播路径是否存在,表示第1至第 n条传播路径的信道衰减值;
32、步骤s4-2、建立信道向量的概率模型,表示为:
33、
34、其中,为隐藏信道支持向量的概率,为隐藏信道值向量的概率,是联合条件先验,表示为:
35、
36、为的第 n个元素,为dirac delta函数。
37、优选的,所述步骤s5中,所述uav接收信号模型如下:
38、
39、其中,为测量矩阵,表示归一化的bs到nsp的信道矩阵,定义为,表示由bs传输的训练导频矩阵, p表示导频序列数,表示ris的对角线相移矩阵,表示复加性高斯白噪声,是噪声功率,,是一个选择矩阵,其通过随机选择和重新排序单位矩阵的行而生成,是离散傅里叶变换矩阵,是通过随机重新排序单位矩阵产生的随机置换矩阵。
40、优选的,所述步骤s6具体包括:
41、步骤s6-1、设定离格偏移角向量,执行信道估计模块a,输出和
42、
43、
44、其中,表示第 i次迭代时的取值,和分别表示信道估计模块a的输出均值和输出方差,表示信道估计模块a的输入均值,表示信道估计模块a的输入方差,和的初值均为零向量,的初值为,表示信道的稀疏率,表示任意一条激活传播路径上信道衰减值的方差;
45、更新信道估计模块b的输入和为,
46、
47、
48、其中,表示信道估计模块b的输入均值,表示信道估计模块b的输入方差,和分别表示信道估计模块a的外在输出均值与外在输出方差;
49、步骤s6-2、执行信道估计模块b,输出均值和方差,
50、
51、
52、其中,表示求期望,表示求方差,表示后验概率,且
53、
54、
55、
56、其中,表示复高斯分布函数,表示中的第 n个元素,表示任意一条激活传播路径上信道衰减值的均值;
57、更新信道估计模块a的输入均值和输入方差为,
58、
59、
60、其中,和分别表示信道估计模块b的外在输出均值与外在输出方差;
61、循环执行信道估计模块a和信道估计模块b,直至收敛;
62、步骤s6-3、记,采用梯度上升法更新为,
63、
64、其中,表示离格偏移角度更新向量,表示第次迭代时离格偏移角度更新量,表示第 n个离格偏移角度,;
65、步骤s6-4、更新,返回步骤s6-1直至收敛。
66、相比于现有技术,本发明的有益效果在于:
67、(1)本发明的一种临近空间平台到无人机下行多径信道估计方法,将原始nsp到uav的稀疏信道模型转化到角度域进行表示,进而将复杂的信道估计问题转化为压缩感知问题,并基于设计的压缩感知测量矩阵推导出了具有较少导频开销的训练导频矩阵。
68、(2)本发明的一种临近空间平台到无人机下行多径信道估计方法,推导了nsp到uav信道的先验概率,以表征信道的随机性与稀疏性,并据此推导了nsp到uav信道的后验概率和构建了该后验概率的因子图。
69、(3)本发明的一种临近空间平台到无人机下行多径信道估计方法,提出了一个nsp到uav信道的循环正交近似消息传播估计方法,该方法通过循环mmse参数估计模块的设计消除了因子图中的环结构并利用em方法得到了信道参数的估计值。
- 还没有人留言评论。精彩留言会获得点赞!