一种360度朝向可调的起倒机构及报靶装置的制作方法
1.本发明属于射击训练设备技术领域,特别涉及一种360度朝向可调的起倒机构与报靶装置。
背景技术:
2.目前国内军用实弹射击训练用使用的运动装甲靶主要为轨道式移动靶车,移动靶车在预先建设好的轨道内运动。使用时,靶车在轨道内移动到目标点位,靶面朝向也为固定方向,射击时沿靶面垂直方向进行射击,击中后靶面倒下。由于靶车只能沿固定的轨道内往复运动,路径单一,且靶面朝向固定,要求训练时只能沿固定方向进行射击,与实战演练的相似度较低。此外,遥控装甲靶起倒过程中,为了满足显隐起倒动作要求,靶面往往较高,在加上野外风力作用,所需要的起倒力矩较大,对整个设备动力执行系统要求较高。
3.现有技术靶车移动轨迹单一,且需要预先建设轨道,成本高周期长;而且靶面朝向固定,无法自动调整,需要射击时沿固定方向进行,难以代表实战时复杂的现场状况;起倒动力系统基本都是电机驱动,功率密度较低,动力较弱,难以满足恶劣工作环境下的起倒要求。
技术实现要素:
4.针对现有技术的缺陷或不足,本发明一方面提供了一种360度朝向可调的起到机构。
5.为此,本发明提供的360度朝向可调的起到机构包括旋转机构和安装在旋转机构上的起倒机构,所述起倒机构包括主体箱、第二主轴和限位体;所述第二主轴转动式安装于主体箱上,且第二主轴的中间段位于主体箱内,两端伸出主体箱外;所述限位体安装于主体箱内,且位于第二主轴旁侧;所述第二主轴位于主体箱内的部位上设有限位杆,且限位杆沿第二主轴的径向延伸,同时,第二主轴转动过程中,限位杆可与限位体轴向靠近但不接触;所述限位体上轴向靠近限位杆的一侧安装有至少两个限位传感器,且至少两个限位传感器沿弧线分布,且该弧线与限位杆的端部或限位杆上某一位点在第二主轴转动时所形成的运动弧线轴向上可重合;所述主体箱安装于所述旋转机构上。
6.可选的,所述限位体为板状结构,该板状结构垂直第二主轴的轴向安装于主体箱内。
7.进一步可选的,所述板状结构上沿所述弧线开设有弧形槽,所述至少两个限位传感器安装于弧形槽内。
8.进一步的可选的,所述至少两个限位传感器为两个限位传感器,该两个限位传感器在所述弧线上的夹角为90
°
。
9.可选的,所述主体箱内安装有驱动装置,所述驱动装置选用液压系统,该液压系统工作端的运动方向与所述第二主轴的轴向垂直,所述工作端连接有曲柄,所述曲柄设于所述第二主轴上。
10.进一步,所述主体箱内安装有控制开关,用于控制液压系统的工作。
11.进一步的方案中,所述第二主轴两个端部之间安装有靶面。
12.可选的,所述旋转机构包括基板,所述基板上方设有回转轴承,回转轴承上方设有工作台面,所述回转轴承外套有第一齿轮;所述基板下方设有电机与第一主轴,且第一主轴穿过基板,同时第一主轴穿过基板的端部安装有第二齿轮,所述第二齿轮与第一齿轮啮合。
13.优选的,所述工作台周边安装有滑动万象座,所述滑动万象座设柱面侧壁和顶面,所述滑动万象座的侧壁与第一工作台侧壁活动接触,所述滑动万向座顶面与工作台的周边底面为活动球面接触结构。
14.可选的,所述第一主轴上安装有编码器。
15.本发明还提供了一种报靶装置。为此,本发明所提供的报靶装置包括无人驾驶车体,该无人驾驶车体上安装有上述的360度朝向可调的起到机构,所述第二主轴的两个端部之间设有靶面。
16.进一步,本发明的报靶装置还包括报靶机构,所述报靶机构上设置激波传感器阵列,用于测量飞行弹丸的脱体激波,采集弹丸位置信息。为实现本发明目的,本发明采用如下技术方案。
17.相比于现有技术,本发明的机电液一体化起倒机构,为起倒动作提供充足的动力,充分发挥液压系统高功率密度的特点,可以应对各种复杂环境,整体结构更加紧凑,隐蔽性更高,可以应对各种复杂环境;其中旋转机构可360度自由旋转,工作灵活。进一步,本发明的报靶装置可带动靶面实现360度自由旋转,可以根据射击方向自动调整,在实战中更加灵活,满足不同种类的射击要求。
附图说明
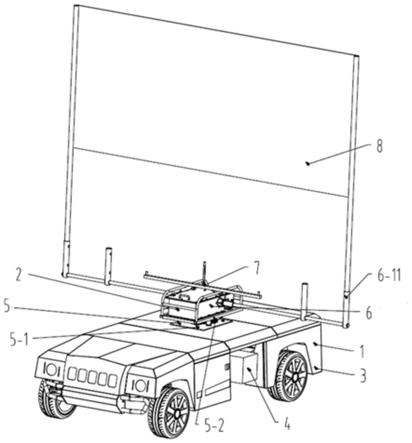
18.图1为本发明报靶装置的结构示意图;
19.图2为本发明旋转机构的侧视结构剖面示意图;
20.图3为本发明旋转机构的整体结构示意图;
21.图4为本发明起倒机构的整体结构示意图;
22.图5为本发明起到机构的侧视结构剖面示意图;
23.图6为本发明起到机构的主体箱内部结构示意图;
24.图7为本发明的限位结构的示意图。
具体实施方式
25.如无特殊解释说明,本发明的术语或零部件均按照本领域技术人员的常规认识理解或采用本领域相应功能的零部件。
26.本发明所述的轴向、径向、内、外、旁侧、端部等方向或方位性术语与附图中相应的方向或方位一致。所述轴向上可重合是指两者(两条弧线)在轴向上不接触且平行,且两个互为各自轴向上的投影,或者两者均位于同于圆柱面上且沿圆柱的顶面和底面上下平行,也可以理解为两者共轴且形状相同。
27.本发明的旋转机构采用可360
°
旋转的转动机构,起倒机构可实现相应的起立(即与地面垂直)和倒下(与地面平行),以及起立与倒下之间的任一角度,起倒机构的主要结构
包括主体箱和转动式安装在主体箱上/内的第二主轴,该第二主轴的中间段位于主体箱内,两端伸出主体箱外用于安装靶面,具体可通过靶臂安装靶面,同时主体箱内安装有限位体,该限位体位于第二主轴旁侧,为实现起倒角度控制,第二主轴上设有限位杆,该限位杆沿第二主轴的径向延伸。进一步的方案中,限位杆与第二主轴为一体结构或通过与主轴柱面匹配的安装部件将限位杆安装在第二主轴上,在第二主轴转动时,限位杆与限位体在轴向上靠近但不接触,同时限位体上轴向上靠近限位杆的一侧面安装有至少两个限位传感器,且至少两个限位传感器沿限位杆的端部或限位杆上某一位点在第二主轴转动时所形成的运动弧线分布,限位传感器为非接触式感应开关,第二主轴转动时带动限位杆转动,当限位杆旋转到达限位传感器触发位后,限位传感器被触发,并发出信号,通过自动化控制手段监测/控制第二主轴的转动角度,进而控制相应的起倒位置,如此,限位传感器在弧线上的分布夹角决定了起倒过程中的起始角度、中间角度(与地面呈非90
°
夹角)和最终角度。所述限位传感器可采用但不限于电容式非接触传感器。
28.限位体的作用是用于安装限位传感器,且可实现限位传感器与运动过程中的限位杆之间的非接触式信号互动,一种具体的限位体的结构是板状结构,该板状结构垂直与第二主轴安装于主体箱内,具体可安装在主体箱的一侧壁上,其安装位置和高度需实现限位体的功能。进一步,该板状结构的限位体上开设有沿上述运动弧线的弧形槽,所述至少两个限位传感器之间呈一定角度安装于弧形槽中,具体示例,两个限位传感器呈90
°
安装于弧形槽中。
29.本发明中第二主轴的驱动装置可选用电动,液压等方式,其中液压驱动的具体示例是,在主体箱内安装有液压系统,具体为液压泵和液压缸,液压缸的运动方向与第二主轴的轴向垂直,同时液压缸的端部设有曲柄,且曲柄安装于第二主轴上,这样液压系统通过曲柄驱动第二转轴转动。
30.进一步的方案中,主体箱内安装有控制开关或控制装置,用于控制驱动装置工作,具体可选用电磁阀等。
31.实施例:
32.该实施例的360度朝向可调的起到机构包括旋转机构和起倒机构,其中:
33.如图4
‑
7所示,起倒机构包括主体箱6
‑
1,第二主轴6
‑
8可采用以下手段安装于主体箱上,主体箱6
‑
1上两侧设有轴承座6
‑
6,并通过第二轴承6
‑
7与第二主轴6
‑
8连接,更具体的方案是,第二轴承6
‑
7末端设有第二油封6
‑
9,第二油封6
‑
9的内外环分别与第二主轴6
‑
8和主体箱6
‑
1连接,第二主轴6
‑
8上设有第二挡圈6
‑
10和第三挡圈6
‑
11,并与第二主轴6
‑
8固定连接,防止第二主轴6
‑
8轴向移动;
34.第二主轴6
‑
8上设有限位杆6
‑
14,限位杆6
‑
14与限位传感器6
‑
15相关联,限位传感器6
‑
15通过限位体第一安装板6
‑
16与主体箱6
‑
1固定,具体如图7所示,第一安装板6
‑
16上设有弧形槽,弧形槽中安装有两个限位传感器6
‑
15,具体可通过螺母锁定,且两个限位传感器的角度为90
°
;另一些方案中,通过调整限位传感器6
‑
15的位置,可以调整起靶和倒靶的动作角度,该实施例默认起靶为竖直方向,倒靶为水平方向,即默认两个限位传感器的初始角度为90度;
35.第二主轴6
‑
8与曲柄6
‑
17一端固定连接,曲柄6
‑
17另一端与液压系统连接。具体示例是,曲柄6
‑
17另一端与液压缸6
‑
18前端铰接,液压缸6
‑
18的后端与第二安装板6
‑
19铰接,
第二安装板6
‑
19与主体箱6
‑
1固定连接,主体箱6
‑
1内部设有液压泵6
‑
20,液压泵6
‑
20上端安装电磁阀6
‑
21,液压泵6
‑
20下端通过第三安装板6
‑
22与主体箱6
‑
1固定连接;
36.该实施例起倒机构6的工作原理是:液压泵6
‑
20上电运转,控制中心控制电磁阀6
‑
21的阀芯移向起靶控制侧,液压泵6
‑
20推动液压缸6
‑
18的推杆伸出,从而推动曲柄6
‑
17进行旋转,并带动第二主轴6
‑
8和限位杆6
‑
14同步旋转;
37.限位传感器6
‑
15为非接触式感应开关,当限位杆6
‑
14旋转到达限位传感器6
‑
15触发位后,弧形槽一端的限位传感器6
‑
15被触发,通过无线或有线发出相应限位信号,进一步可通过该限位信号控制完成起的动作;具体在报靶装置中使用时,并向控制中心发出信号,控制中心发出指令进行断电操作,靶面8到达指定位置,完成起靶动作;
38.同理,液压泵6
‑
20上电运转,电磁阀6
‑
21的阀芯换向到倒靶控制侧,液压泵6
‑
20推动液压缸6
‑
18的推杆缩回,从而带动曲柄6
‑
17进行复位移动,并将相关联的所有部件进行反向旋转,直至限位杆6
‑
14触发另一端的限位传感器6
‑
15后,通过无线或有线发出相应限位信号,进一步可通过该限位信号控制完成倒的动作;具体在报靶装置中使用时,控制中心发出指令进行断电操作,完成倒靶动作。
39.进一步的方案中,第二主轴6
‑
8两端安装靶臂6
‑
13。具体可通过第二销钉6
‑
12与靶臂6
‑
13固定连接。
40.在上述方案基础上,还有些方案中,参考图4,主体箱6
‑
1上端设有主体箱盖板6
‑
2,主体箱6
‑
1下端与箱体骨架6
‑
3固定连接,箱体骨架6
‑
3上设有电池箱6
‑
4,并通过第一销钉6
‑
5固定连接,所述电池箱6
‑
4为液压泵6
‑
20及其他元器件提供电能。
41.为实现自动化控制,主体箱6
‑
1内还设有起倒控制器6
‑
23,起倒控制器6
‑
23与主体箱6
‑
1固定连接,起倒控制器可选用本领域常规的的器件组装而成,用于控制起倒机构的上述工作。
42.一种具体的旋转机构示例如图2所示,所述旋转机构5包括基板5
‑
1,基板5
‑
1的上方与回转轴承5
‑
3固定连接,回转轴承5
‑
3的外环与工作台第一法兰5
‑
2的下方固定连接,回转轴承5
‑
3外环设有大齿轮5
‑
4,大齿轮5
‑
4与小齿轮5
‑
5通过齿轮传动,小齿轮由基板5
‑
1底部的第一主轴5
‑
7和电机5
‑
15驱动。在本发明旋转机构发明构思基础上采用相关领域的连接部件、密封部件实现具体连接和驱动。详细的结构示例是:
43.小齿轮5
‑
5通过第一平键5
‑
6与第一主轴5
‑
7上端连接,小齿轮5
‑
5上端由圆螺母5
‑
8固定,
44.第一主轴5
‑
7中间通过第一轴承5
‑
9与第一套筒5
‑
10连接,此外,第一主轴5
‑
7中间通过第一油封5
‑
11与第一套筒5
‑
10连接,第一套筒5
‑
10上端设有第一挡圈5
‑
12,以防止第一油封5
‑
11脱落,第一套筒5
‑
10穿过在基板5
‑
1上的圆孔,第一套筒5
‑
10下端与第二法兰5
‑
13上端固定连接,其中第一套筒5
‑
10与第二法兰5
‑
13之间设有第一密封圈5
‑
14,第二法兰5
‑
13上端与基板5
‑
1下端面固定连接。
45.第二法兰5
‑
13下端与电机5
‑
15上端固定连接,电机5
‑
15通过第二平键5
‑
16与第一主轴5
‑
7固定连接,电机5
‑
15下端与第三法兰5
‑
17上端固定连接,第三法兰5
‑
17下端与第四法兰5
‑
18上端固定连接,其中第三法兰5
‑
17和第四法兰5
‑
18之间设有第二密封圈5
‑
19。
46.所述旋转机构5的工作原理是:电机5
‑
15上电运转,并带动第一主轴5
‑
7进行旋转,从而带动位于第一主轴5
‑
7上方固定连接的小齿轮5
‑
5同步旋转,小齿轮5
‑
5通过齿轮传动
带动大齿轮5
‑
4旋转,小齿轮5
‑
5与大齿轮之间为固定传动比,且具有增力效果;大齿轮5
‑
4旋转带动其上方固定连接的第一法兰5
‑
2同步旋转,从而带动其上方机构的整体旋转。
47.进一步的方案中,第一主轴5
‑
7上设编码器,两者同步旋转,编码器可以实时反馈角度数据。具体的一种实现方案是,第四法兰5
‑
18下端与编码器5
‑
20固定连接,其中第四法兰5
‑
18与编码器5
‑
20之间设有第三密封圈5
‑
21,编码器5
‑
20的输出部分与第一主轴5
‑
7下端固定连接。
48.进一步优选的方案中,如图3所示,所述基板5
‑
1上且位于第一法兰5
‑
2的四周设有四个对称布置的滑动万象座。具体的,滑动万象座为滑轮结构,顶面设活动球形。更具体的方案是,支架5
‑
22安装万象滑轮5
‑
23,万向滑轮5
‑
23顶部与第一法兰5
‑
2较大面积侧的上表面接触;所述万向滑轮5
‑
23顶部为球形可转动结构,当第一法兰5
‑
2转动时,万向滑轮5
‑
23顶部的球形结构同步转动,并提供一定预压力,保证第一法兰5
‑
2的稳定性。
49.进一步,一种具体的报靶装置,包括无人驾驶靶车,该无人驾驶靶车上安装有上述360
°
朝向可调的起倒机构。如图1所示,一种具体的全地形自动导航的360度智能朝向的自动报靶装置,包括无人驾驶靶车机构1和靶机装置2;
50.所述无人驾驶靶车机构1包括靶车本体3和电控箱4,所述电控箱4安装在靶车本体3内部。
51.所述靶机装置2包括旋转机构5、起倒机构6和报靶机构7;所述报靶机构7上设置有激波传感器阵列,通过传感器实时测量飞行弹丸的脱体激波,或者它在特定条件下诱发的压力,将获得的电信号传输到数据中心,再经由算法计算实现弹丸位置精确定位;
52.所述旋转机构5通过其下方的基板5
‑
1与无人驾驶靶车机构1固定连接,所述旋转机构5通过其上方的第一法兰5
‑
2与起倒机构6固定连接,所述报靶机构7安装在起倒机构6上方,报靶机构7通过位于其下侧的锥销与起倒机构上方的锥套过盈配合固定;
53.所述起倒机构6的靶臂6
‑
11上设有靶面8;
54.所述报靶机构7位于靶面8的垂直下方,报靶机构7的上沿和靶面8的下沿的距离适当。
55.该装置的工作原理是:射击训练时,可由远程控制终端控制无人驾驶靶车机构1进行移动,承载靶机装置2到达指定地点;
56.当控制中心发出准备射击命令时,所述旋转机构5根据控制中心指令带动位于其上方的起倒机构6和报靶机构7进行旋转,使得起靶后的靶面8朝向面对射击者;
57.当控制中心发出起靶命令时,所述起倒机构6带动靶面8由水平方向旋转到竖直方向,完成起靶动作;
58.此时控制中心提示射击者向靶面8进行射击,并由报靶机构7完成射击结果的监测和判断,将射击结果上传到数据中心;
59.最后当控制中心发出倒靶命令时,所述起倒机构6带动靶面8由竖直方向旋转到水平方向,完成倒靶动作;
60.所述旋转机构6可根据射击者的射击方向,经由控制中心计算并发出相应指令,将靶面调整至面向射击者。
61.上述实施例中所述的控制中心和报靶机构可为现有的报靶控制中心和报靶机构,也可为根据本发明的思想对现有报靶控制中心进行优化和改进后的控制中心与报靶机构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1