一种气动式高精度声电定位起倒靶的制作方法
[0001]
本实用新型属于起倒靶技术领域,特别涉及一种气动式高精度声电定位起倒靶。
背景技术:
[0002]
现有的起倒靶装置大多以电力驱动为主,充电时间较长,当进行野外训练时,供电则成为最大难题,也为训练增加了困难,本设计以气动为主要动力来源,充气时间快,且简单易操作;其次现有起倒靶装置弹着点位置精度范围过大,无法满足精度射击训练要求,本次设计通过使用激波传感器通过算法程序与控制器精准定位弹着点位置,误差不大于3mm,满足精度射击要求;体积小,重量轻。
[0003]
近年来,随着新时期军事训练要求不断提高,军队射击训练也在向着智能化、自动化、精准化提高,为满足军队训练要求,为军队射击训练提供更加实用、高质量的靶标器材也成为了各厂商不断追求的目标,但由于各种因素制约,很多靶标器材无法全面满足现代军队射击训练要求,例如军队经常组织野外射击训练,环境较为严苛,不同于靶场内射击,因此野外供电则成为最大难题,大多数靠电力为主要驱动方式的靶标系统无法满足长时间的供电要求,同时由于充电时间也较长,为野外训练增加了一定困难,并且在冬季时,电池耐用性一般比较低,设备可使用时间会较短,另外现代军队射击训练中,很多训练科目中涉及到精度射击,用来更好的提高单兵射击能力,此时便要求靶标设备可以完成误差较低的报靶准确度,为解决上述存在的两种问题,以本实用新型为例,采用了以气动为主要的动力方式,以激波报靶技术解决了靶标器材充电时间长,以及无法精确报靶的技术难题。
[0004]
现有产品野外充电时间较长,无法满足精度射击要求,且结构复杂,不轻便,无法满足在各种环境因素下使用,成本相对较高;本实用新型采用气动式起倒机构,动力方式非传统电池供电方式,当气瓶气压较低时,充气速度与传统电力驱动充电相比,时间短速度快;采用该种动力方式就是为了满足各种环境下的使用,减少环境因素给射击训练带来的制约。
技术实现要素:
[0005]
为解决上述技术问题,本实用新型提供一种气动式高精度声电定位起倒靶,包括腔体靶面结构和气动式起倒装置,所述气动式起倒装置包括高压气瓶,供电电源,电磁换向阀,分水调压阀,执行气缸,起倒机构,电路控制器,控制面板以及靶机外壳;起倒机构包括横轴、转臂、缓冲弹簧、靶臂,执行气缸的气缸轴端部与转臂的端部连接,转臂另一端固定连接于横轴,横轴两端伸出靶机外壳连接有靶臂,所述横轴上设有缓冲弹簧;高压气瓶通过瓶口减压阀与分水调压阀相连,所述分水调压阀与电磁换向阀相连,控制单元与电磁换向阀电连接,电磁换向阀连接执行气缸。
[0006]
优选地,所述腔体靶面结构为高收缩性前后eva面板,木框架贴合而成的密闭腔体。
[0007]
优选地,所述执行气缸为sda型超薄气缸。
[0008]
有益效果:
[0009]
1、本实用新型装置结构简单、轻便、安装维护简单。
[0010]
2、工作介质是空气,排气处理简单,不污染环境,成本低。
[0011]
3、输出力及工作速度的调节非常容易。气缸速度一般为50到500mm/s, 比传统电气方式的动作速度快。
[0012]
4、可靠高,使用寿命长。电器元件的有效动作次数约为数百万次,而一般电磁阀的寿命大于5000万次。
[0013]
5、利用空气的可压缩性,可储存能量,可短时间释放能量,以获得间歇运动中的高速响应;可实现缓冲;对冲击负载和过负载有较强的适应能力。
附图说明
[0014]
图1为本实用新型原理框图。
[0015]
图2为腔体靶面结构示意图。
[0016]
图3是气动式起倒装置的俯视图。
[0017]
图4是气动式起倒装置的立体图。
[0018]
图5是气动原理示意图。
[0019]
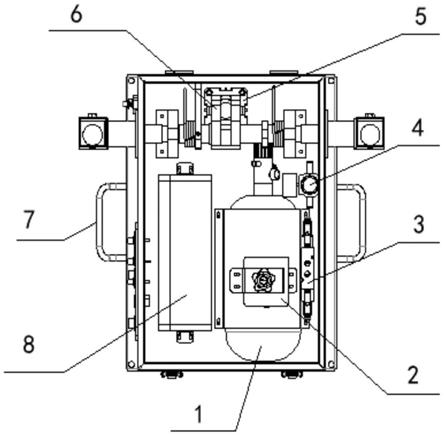
图6是气动式高精度声电定位起倒靶的整体示意图
[0020]
图中:1.气瓶 2.电源 3.电磁换向阀 4.调压阀 5.气缸 6.起倒机构 7.把手 8.电气控制盒 9.控制面板 10.靶机外壳 11.胸环靶面 12.腔体面板 13.腔体包边。
具体实施方式
[0021]
为为满足训练射击需要,一种气动式高精度声电定位起倒靶,包括腔体靶面结构和气动式起倒装置
[0022]
腔体靶面结构为高收缩性前后eva面板,木框架贴合而成的密闭腔体,密闭性较好,结构结实轻便,耐用度高,可承受大量子弹射击,靶面易于更换,整体结构如图2所示,因考虑到靶面处为受弹较多,因此靶面可以多次更换,操作简单。
[0023]
气动式起倒装置
[0024]
该部分为实现整套系统完成起倒显隐动作的机构,其主要构成为;高压气瓶1,供电电源2,电磁换向阀3,分水调压阀4,执行气缸5,起倒机构 6,电路控制器8,控制面板9,以及靶机外壳10;
[0025]
起倒机构主要包含为:气缸、气缸轴、滑道、主传动轴、缓冲弹簧、轴承座、靶臂等;
[0026]
气体来源及传输装置包含为:气瓶、电磁换向阀、分水调压阀、气缸;
[0027]
其他部分主要为:靶机外壳、电气控制单元、控制面板、以及锂电池电源。
[0028]
靶机中气缸选取的型号为sda型超薄气缸,较普通气缸相比,该气缸体积小,不占用空间,其次耗气量较低,气缸轴运动平稳,气密性较高,气体泄露较少。
[0029]
气缸轴在滑道中滑动时,当达到起靶的位置时,气缸轴正好运动到滑道上端极限位,当达到倒靶位置时,气缸轴正好运动到滑道下端极限位,同时,当达到起靶与倒靶位置时,电磁换向阀继续工作,持续给气缸供气,以提高靶面整体稳定性,该种设计方式无需感应开关,依靠气缸的极限行程来达到所需起靶与倒靶状态,相比电机驱动结构来说,该种设
计所需电子件更少,降低了电子器件容易损坏的概率,结构简单,稳定性更好。
[0030]
整套气路系统的气动接头选用锁母接头,防止出现气体泄漏,气路系统组装完成后进行整体气密性检验。
[0031]
工作方式
[0032]
高压气瓶作为主要动力输出,为整个机构提供动力来源,经过瓶口减压阀,将高压气体调节成低压气体,工作时气体由瓶口减压阀输出,之后经过分水调压阀,将气压调节成可实现机构起倒所用压力,当控制单元发出倒靶指令时,电磁换向阀调节到下位状态,出气口打开,气体经此口进入到执行气缸上腔体中,执行气缸完成收缩动作,同时缓冲弹簧压缩,以缓冲靶面倒靶的重力势能,提升整套结构的稳定性,也为下一次起靶提供一定的弹性势能,减少高压气体的使用量,进而提高整套系统的起倒次数。
[0033]
当控制单元发出起靶指令时,电磁换向阀调节到上位状态,另一出气口打开,气体经过此口进入执行气缸下腔体,执行气缸完成伸出动作,缓冲弹簧释放,另一侧缓冲弹簧压缩,以提高起靶状态靶面的稳定性。设备使用电源为大容量耐用锂电池,设备整体耗电量较低,可供长时间使用,同时电池为可拆卸充电,可满足集中充电要求,较为方便。
[0034]
最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1