检测信号修正方法、马达控制装置以及电动助力转向装置与流程
1.本发明涉及检测信号修正方法、马达控制装置以及电动助力转向装置。
背景技术:
2.为了减轻车辆的转向力,已知有通过马达来辅助转向的电动助力转向(eps:electric power steering)装置。例如,在下述专利文献1中公开了一种马达控制装置,其基于与电动助力转向装置的马达的旋转轴的旋转相应地从传感器输出的正弦信号以及余弦信号来运算马达的旋转角度,并基于运算出的旋转角度来控制马达。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2019-144056号公报
技术实现要素:
6.发明要解决的问题
7.在使用输出与马达的旋转轴的旋转相应的检测信号的传感器来运算马达的旋转角度的情况下,即使在传感器出厂时进行校正,有时也会根据实际的使用环境(温度等)而在传感器的检测信号中产生误差。
8.若基于这样的包含误差的检测信号来运算马达的旋转角度,则旋转角度的测量值(测量角度)的直线性(linearity)降低。
9.若基于包含直线性误差(linearity误差)的测量角度来控制马达,则在马达中产生直线性误差所包含的马达旋转周期的整数倍的频率成分的振动。若该频率与车身的共振频率一致,则车辆发生振动而作为异音、振动传递给驾驶员,有可能损害舒适性。
10.本发明是鉴于这样的问题而完成的,其目的在于,在基于与马达的旋转轴的旋转相应地从传感器输出的检测信号来控制对车辆的转向轴赋予转向辅助转矩的马达时,减轻车辆因马达所产生的振动而共振的情况。
11.用于解决问题的方案
12.为了实现上述目的,根据本发明的一个方式,提供一种检测信号修正方法,该检测信号修正方法对作为与马达的旋转轴的旋转相应地从传感器输出的检测信号的正弦信号及余弦信号进行修正,该马达对车辆的转向轴赋予转向辅助转矩。在检测信号修正方法中,基于检测信号运算旋转轴的旋转角度,基于旋转角度运算转向轴的转向速度,运算检测信号的误差,在转向速度为转向速度阈值以上且检测信号的误差为误差阈值以上的情况下修正检测信号的误差。
13.根据本发明的另一方式,提供一种对车辆的转向轴赋予转向辅助转矩的马达的马达控制装置。马达控制装置具备:传感器,其输出与马达的旋转轴的旋转对应的包含正弦信号及余弦信号的检测信号;旋转角度运算部,其基于检测信号来运算旋转轴的旋转角度;控制部,其基于旋转角度来控制马达;转向速度运算部,其基于旋转角度来运算转向轴的转向
速度;误差运算部,其运算检测信号的误差;以及检测信号修正部,其在转向速度为转向速度阈值以上且检测信号的误差为误差阈值以上的情况下,对检测信号的误差进行修正。
14.本发明的另一方式的电动助力转向装置具备上述的马达控制装置和由马达控制装置控制的马达,通过马达对车辆的转向轴赋予转向辅助转矩。
15.发明效果
16.根据本发明,在基于与对车辆的转向轴赋予转向辅助转矩的马达的旋转轴的旋转相应地从传感器输出的检测信号来控制马达时,能够减轻车辆因马达产生的振动而共振的情况。
附图说明
17.图1是表示实施方式的电动助力转向装置的一例的概要的结构图。
18.图2是表示传感器单元的一例的概要的分解图。
19.图3是表示控制装置的一例的概要的结构图。
20.图4是控制装置的功能结构的一例的说明图。
21.图5的(a)~(c)分别是正弦信号以及余弦信号的偏移误差、振幅误差、相位误差的说明图。
22.图6是直线性误差的说明图。
23.图7是马达的转子的旋转角度基准与传感器单元的旋转角度基准之间的相位偏离量(原点误差)的说明图。
24.图8是图4所示的马达控制部的一例的功能结构图。
25.图9是图4所示的检测信号修正部的一例的功能结构图。
26.图10是检测信号修正部的动作模式的一例的状态转变图。
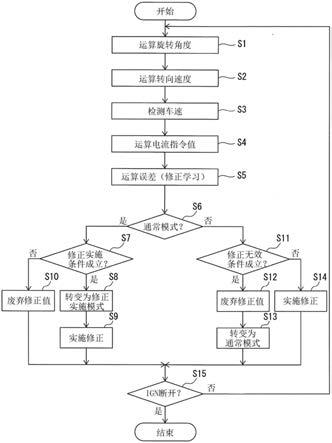
27.图11是实施方式的检测信号修正方法的一例的流程图。
具体实施方式
28.参照附图对本发明的实施方式进行详细说明。此外,以下所示的本发明的实施方式例示了用于将本发明的技术思想具体化的装置、方法,本发明的技术思想并不将构成部件的结构、配置等确定为下述内容。本发明的技术思想能够在权利要求书所记载的权利要求所规定的技术范围内施加各种变更。
29.(结构)
30.在图1中示出本实施方式的电动助力转向装置的结构例。转向方向盘1的转向轴(例如柱轴)2经由减速齿轮3、万向接头4a及4b、小齿轮齿条机构5与转向车轮的转向横拉杆6连结。在转向轴2设置有检测施加于转向轴2的转向转矩th的转矩传感器7,对转向方向盘1的转向力进行辅助的马达10经由减速齿轮3连结于转向轴2。
31.传感器单元20将与马达10的转子的旋转角度θ对应的正弦信号sin1=a
×
sinθ+b和余弦信号cos1=a
×
cosθ+b向控制装置30输出。以下,有时将正弦信号sin1以及余弦信号cos1统称为“检测信号”。
32.控制装置30是对电动助力转向(eps:electric power steering)装置进行控制的电子控制单元(ecu:electronic control unit)。
33.传感器单元20及控制装置30是权利要求书中记载的“马达控制装置”的一例。
34.从电池40向控制装置30供给电力,并且经由点火(ign)钥匙41输入点火钥匙信号。另外,赋予转向辅助力的单元不限于马达,能够利用各种种类的致动器。
35.控制装置30基于传感器单元20的检测信号来运算马达10的旋转轴11的旋转角度θ。
36.控制装置30基于由转矩传感器7检测出的转向转矩th和由车速传感器8检测出的车速vh,使用辅助映射等进行辅助指令的转向辅助指令值的运算。
37.控制装置30基于转向辅助指令值和马达10的旋转角度来控制向马达10供给的电流i,对马达10进行驱动控制。由此,马达10产生的转矩作为驾驶员的方向盘操作的辅助力(转向辅助力)赋予给转向系统。
38.参照图2对传感器单元20进行说明。
39.传感器单元20具备磁体21、电路基板22以及支承部件23。
40.磁体21固定于马达10的旋转轴11的与输出端12相反侧的端部14,具有沿着旋转轴11的周向排列的不同的磁极(s极以及n极)。
41.在电路基板22安装有检测磁通的mr(磁阻:magnetic resistance)传感器元件(integrated circuit:集成电路)24。也可以在电路基板22安装多个mr传感器元件,构成基于各个mr传感器元件的检测信号分别对旋转轴11进行计算的冗余系统。
42.电路基板22通过未图示的紧固螺钉、铆钉等固定单元固定于支承部件23。另外,支承部件23也同样通过未图示的固定单元固定于马达10。
43.电路基板22固定于支承部件23的位置和支承部件23固定于马达10的位置被决定为在电路基板22固定于支承部件23且支承部件23固定于马达10时,在支承部件23与马达10之间配置有电路基板22,mr传感器元件24接近磁体21。
44.当旋转轴11与马达10的转子一起旋转,磁体21随着旋转轴11的旋转而旋转时,由此,mr传感器元件24检测与旋转角度对应的磁体21的磁通变化,输出与马达10的旋转轴11的旋转对应的检测信号。
45.例如,mr传感器元件24将与马达10的旋转轴11的旋转角度θ对应的正弦信号sin1和余弦信号cos1作为与马达10的旋转轴11的旋转对应的检测信号而输出。
46.另外,传感器单元20也可以具备mr传感器以外的传感器。传感器单元20能够采用输出与旋转轴11的旋转角度θ对应的正弦信号和余弦信号的各种形式的传感器。
47.支承部件23例如是覆盖电路基板22的罩。支承部件23例如具有在图2中向下方开口的凹部,电路基板22固定于支承部件23的凹部内。当将支承部件23固定于马达10时,支承部件23的凹部的开口部被马达10遮蔽,在由支承部件23的凹部和马达10划分出的内部空间内收纳有电路基板22。由此,电路基板22被保护而免受来自外部的冲击、异物的影响。
48.支承部件23例如由铝合金等热传导性好的金属形成,也可以起到作为散热器的作用。另外,支承部件23也可以是散热器本身。
49.作为与传感器单元20分体的电子控制单元的控制装置30通过线束25与传感器单元20连接。与马达10的旋转轴11的旋转相应地从mr传感器元件24输出的检测信号经由线束25向控制装置30传递。
50.控制装置30基于mr传感器元件24的检测信号运算马达10的旋转轴11的旋转角度
θ,根据运算出的旋转角度θ控制功率半导体开关元件,驱动马达10。
51.参照图3对控制装置30进行说明。
52.控制装置30具备cpu(central processing unit:中央处理单元)或mpu(micro-processing unit:微处理单元)等处理器31、作为存储器等的存储装置32、模拟数字转换器(adc:analog-digital converter)33及34、驱动电路35、电流传感器36、i/f(接口)电路37。
53.以下说明的控制装置30的功能例如通过处理器31执行存储于存储装置32的计算机程序来实现。
54.控制装置30除了处理器31以外,或者代替处理器31,也可以由用于执行以下说明的各信息处理的专用的硬件来形成。
55.例如,控制装置30也可以具备在通用的半导体集成电路中设定的功能性的逻辑电路。例如控制装置30也可以具有现场可编程门阵列(fpga:field-programmable gate array)等可编程逻辑器件(pld:programmable logic device)等。
56.转矩传感器7检测出的转向转矩th和车速传感器8检测出的车速vh经由i/f电路37输入到处理器31。处理器31基于转向转矩th和车速vh来运算辅助指令的转向辅助指令值。
57.从mr传感器元件24输出的检测信号(即正弦信号sin1以及余弦信号cos1)被adc 33以及adc 34转换为数字信号,并输入到处理器31。处理器31基于正弦信号sin1以及余弦信号cos1来运算马达10的旋转轴11的旋转角度θ的测量值(以下表述为“测量角度θm”)。进而,控制装置30通过对测量角度θm的直线性误差和原点的相位偏离进行修正来运算修正后旋转角度θc。
58.驱动电路35基于从处理器31输出的控制信号,供给对马达10进行驱动的马达电流。驱动电路35例如可以是具备对马达电流进行接通断开的开关元件的逆变器。
59.电流传感器36检测马达电流。在本实施方式中,马达10是3相马达,电流传感器36检测u相马达电流ium、v相马达电流ivm以及w相马达电流iwm。另外,本发明的应用对象并不限定于3相马达。本发明能够应用于各种相数的马达。
60.处理器31经由i/f电路37读取u相马达电流ium、v相马达电流ivm以及w相马达电流iwm的检测值。
61.处理器31基于根据转向转矩th和车速vh运算出的转向辅助指令值、修正后旋转角度θc、马达电流ium、ivm、iwm,生成控制驱动电路35的控制信号。
62.参照图4,对控制装置30的功能结构的一例进行说明。控制装置30具备检测信号修正部50、旋转角度运算部51、直线性修正部52、原点修正部53、马达控制部54、转向速度运算部55以及误差运算部56。
63.检测信号修正部50对正弦信号sin1和余弦信号cos1进行修正。具体而言,检测信号修正部50对正弦信号sin1和余弦信号cos1的偏移误差(参照图5的(a))和正弦信号sin1与余弦信号cos1之间的振幅之差即振幅误差(参照图5的(b))进行修正。
64.另外,检测信号修正部50对修正了偏移误差和振幅误差的正弦信号和余弦信号的和信号(cos+sin)和差信号(cos-sin)进行运算。
65.检测信号修正部50通过对和信号(cos+sin)的振幅与差信号(cos+sin)的振幅之差进行修正,从而从和信号(cos+sin)和差信号(cos-sin)中去除正弦信号sin1与余弦信号cos1之间的相位误差(参照图5的(c))的影响。关于检测信号修正部50的结构和功能,在后
面进一步进行叙述。
66.参照图4。检测信号修正部50将和信号(cos+sin)和差信号(cos-sin)输出至旋转角度运算部51。
67.旋转角度运算部51基于和信号(cos+sin)以及差信号(cos-sin),运算马达10的旋转轴11的测量角度θm。
68.直线性修正部52修正测量角度θm的直线性误差。直线性修正部52输出对测量角度θm的直线性进行修正而得到的测量角度θc0。
69.参照图6,说明测量角度θm的直线性误差。实线表示马达10的旋转轴11旋转1圈的期间的测量角度θm的特性,单点划线表示旋转角度的期望的运算结果(检测结果)θd。
70.直线性误差el是测量角度θm与期望的运算结果θd之间的差分(θm-θd),直线性修正部52通过对从旋转角度运算部51输入的测量角度θm减去直线性误差el来修正测量角度θm的直线性误差。
71.参照图4。原点修正部53对直线性修正部52输出的测量角度θc0和马达10的转子的相位(例如,转子的电角度)之间的偏离δθ进行修正,计算修正后旋转角度θc。
72.参照图7,对测量角度θm与转子的相位之间的偏离(以下有时表述为“相位偏离量”)δθ进行说明。实线表示测量角度θm,虚线表示马达10的u相感应电压。图7以4极对马达的u相感应电压波形为例进行表示。
73.例如,相位偏离量δθ作为转子的旋转角度为规定的转子侧旋转角度基准时的转子的机械角θrm与测量角度θm为规定的传感器侧旋转角度基准时的转子的机械角θrc之间的差分而给出(δθ=θrc-θrm)。转子侧旋转角度基准可以是转子的规定的机械角、例如感应电压的上升点或下降点(感应电压的过零点)、转子的规定的电气角(例如0[deg])。传感器侧旋转角度基准例如可以是规定的测量角度θm(例如0[deg])。
[0074]
参照图4。原点修正部53从修正了直线性的测量角度θc0减去相位偏离量而计算出修正后旋转角度θc(θc=θc0-δθ)。
[0075]
另外,在本实施方式中,在直线性修正部52的后级设置原点修正部53,在修正了测量角度θm的直线性之后,修正与转子的相位的偏离。也可以取而代之,在原点修正部53的后级设置直线性修正部52,在修正了测量角度θm与转子的相位的偏离之后,对直线性进行修正。
[0076]
原点修正部53将修正后旋转角度θc向转向速度运算部55输出。转向速度运算部55通过以减速齿轮3的齿轮比除以修正后旋转角度θc,来运算转向轴2的转向角θh,对转向角θh进行微分来运算转向速度ω。转向速度运算部55将运算出的转向速度ω向检测信号修正部50输出。
[0077]
另外,原点修正部53将修正后旋转角度θc向马达控制部54输出。还向马达控制部54输入电流传感器36检测出的马达电流ium、ivm以及iwm的检测值、转矩传感器7检测出的转向转矩th以及车速传感器8检测出的车速vh。
[0078]
马达控制部54基于转向转矩th、车速vh、修正后旋转角度θc、马达电流ium、ivm以及iwm,生成用于经由驱动电路35对马达10进行驱动的控制信号。
[0079]
参照图8对马达控制部54的功能结构进行说明。马达控制部54具备转矩指令值运算部60、微分器61、电流指令值运算部62、3相/2相转换部63、减法器64及65、pi(比例积分)
控制部66及67、2相/3相转换部68以及pwm(pulse width modulation:脉冲宽度调制)控制部69。
[0080]
转矩指令值运算部60基于转向转矩th以及车速vh,使用辅助映射来运算转矩指令值tref。
[0081]
微分器61对修正后旋转角度θc进行微分来计算马达10的旋转速度(旋转角速度)ωe。
[0082]
电流指令值运算部62使用转矩指令值tref及旋转速度ωe,计算d轴电流指令值idref及q轴电流指令值iqref。d轴电流指令值idref和q轴电流指令值iqref分别被输出到减法器64及65。另外,如图4所示,d轴电流指令值idref和q轴电流指令值iqref也被输出到检测信号修正部50。
[0083]
3相/2相转换部63使用修正后旋转角度θc将马达电流ium、ivm以及iwm转换为2相的电流。具体而言,将3相的马达电流转换为作为2相的电流的d轴马达电流idm以及q轴马达电流iqm。
[0084]
减法器64运算d轴电流指令值idref与反馈来的d轴马达电流值idm之间的偏差id(=idref-idm)。减法器65运算q轴电流指令值iqref与反馈来的q轴马达电流值iqm的偏差iq(=iqref-iqm)。
[0085]
pi控制部66基于d轴电流指令值idref与d轴马达电流idm的偏差id来求出d轴电压指令值vdref。同样地,pi控制部67基于q轴电流指令值iqref与q轴马达电流iqm的偏差iq来求出q轴电压指令值iqref。
[0086]
2相/3相转换部68使用修正后旋转角度θc,通过例如空间矢量调制(空间矢量转换)将由d轴电压指令值vdref以及q轴电压指令值vqref构成的2相的电压转换为3相的电压(u相电压指令值vuref、v相电压指令值vvref以及w相电压指令值vwref)。
[0087]
pwm控制部69基于u相电压指令值vuref、v相电压指令值vvref以及w相电压指令值vwref,生成通过pmw控制来控制驱动电路35的控制信号。
[0088]
根据以上,控制装置30根据马达10的旋转轴11的旋转角度来驱动马达10。
[0089]
接着,对检测信号修正部50的详细情况进行说明。检测信号修正部50具有“通常模式”和“修正实施模式”中的至少2个动作模式。
[0090]
在通常模式下,检测信号修正部50基于在产品出厂时的校正作业中得到的修正数据,对正弦信号sin1和余弦信号cos1的偏移误差(参照图5的(a))和正弦信号sin1与余弦信号cos1之间的振幅误差(参照图5的(b))进行修正。
[0091]
以下,将基于在产品出厂时的校正作业中得到的修正数据修正了偏移误差和振幅误差的正弦信号sin1和余弦信号cos1分别记述为“已校正正弦信号sin2”和“已校正余弦信号cos2”。
[0092]
在已校正正弦信号sin2和已校正余弦信号cos2中,由于实际的使用环境(周围温度、对mr传感器元件24的应力、电磁干扰(emi:electromagnetic interference)等)的影响,有时会暂时产生偏移误差、振幅误差。
[0093]
若基于具有这样的误差的信号来运算测量角度θm,则由于这些误差的影响,测量误差的直线性降低。例如,偏移误差产生与马达10的旋转周期相等的成分即1次成分的误差,振幅误差产生马达10的旋转周期的2倍的周期的成分即2次成分的误差。
[0094]
若这些直线性误差的1次成分和/或2次成分与车身的共振频率一致,则车辆发生振动而作为异音、振动传递给驾驶员,有可能损害舒适性。
[0095]
因此,图4所示的误差运算部56运算已校正正弦信号sin2的偏移误差eos、已校正余弦信号cos2的偏移误差eoc以及已校正正弦信号sin2与已校正余弦信号cos2的振幅误差ea。
[0096]
在修正实施模式中,检测信号修正部50对已校正正弦信号sin2和已校正余弦信号cos2的偏移误差eos、eoc以及振幅误差ea进行修正。
[0097]
图9是检测信号修正部50的一例的功能结构图。检测信号修正部50具备第一正弦偏移修正部70、第一余弦偏移修正部71、第一振幅误差修正部72、修正控制部73、第二正弦偏移修正部74、第二余弦偏移修正部75、第二振幅误差修正部76、加法器77、减法器78和相位误差修正部79。
[0098]
第一正弦偏移修正部70根据在产品出厂时的校正作业中得到的修正数据即第一正弦偏移修正值cofs0对正弦信号sin1的偏移误差进行修正。具体而言,通过从正弦信号sin1减去第一正弦偏移修正值coff0,来运算已校正正弦信号sin2。
[0099]
第一余弦偏移修正部71基于在产品出厂时的校正作业中得到的修正数据即第一余弦偏移修正值cofc0对余弦信号cos1的偏移误差进行修正。
[0100]
另外,第一振幅误差修正部72基于在产品出厂时的校正作业中得到的修正数据即第一振幅修正增益g1来对正弦信号sin1与余弦信号cos1之间的振幅误差进行修正。
[0101]
具体而言,第一余弦偏移修正部71从余弦信号cos1中减去第一余弦偏移修正值cofc0,第一振幅误差修正部72通过对其相减结果乘以第一振幅修正增益g1来运算已校正余弦信号cos2。
[0102]
修正控制部73将检测信号修正部50的动作模式在通常模式与修正实施模式之间切换。
[0103]
具体而言,当在检测信号修正部50以通常模式进行动作的状态下规定的修正实施条件成立时,修正控制部73将检测信号修正部50的动作模式从通常模式切换为修正实施模式。另外,当在检测信号修正部50以修正实施模式进行动作的状态下规定的修正无效条件成立时,修正控制部73将检测信号修正部50的动作模式从修正实施模式切换为通常模式。
[0104]
图10示出检测信号修正部50的动作模式的状态转变图的例子。
[0105]
例如修正实施条件可以至少满足以下的条件(a1)和(a2)这两者。
[0106]
(a1)转向速度ω为第一转向速度阈值thω1以上。
[0107]
(a2)已校正正弦信号sin2的偏移误差eos的绝对值|eos|或已校正余弦信号cos2的偏移误差eoc的绝对值|eoc|为误差阈值teo以上。
[0108]
第一转向速度阈值thω1例如可以根据车辆的共振频率、减速齿轮3的齿轮比而适当设定。这些共振频率、齿轮比根据车辆的车型而不同。
[0109]
例如,如下述表1所示,一般来说,共振频率的范围在20[hz]~40[hz]的范围内,减速齿轮3的齿轮比的范围在18.5~20.5的范围内。
[0110]
[表1]
[0111][0112]
在该情况下,马达10产生车身的共振频率的振动的转向速度ω最低的条件是共振频率为20[hz]、齿轮比为20.5,由于测量角度θm的直线性误差的2次成分而进行共振的情况。该情况下的转向速度ω为175[deg/秒]。
[0113]
另一方面,马达10产生车身的共振频率的振动的转向速度ω最高的条件是共振频率为40[hz]、齿轮比为18.5,由于测量角度θm的直线性误差的1次成分而进行共振的情况。该情况下的转向速度ω为778[deg/秒]。
[0114]
因此,例如第一转向速度阈值thω1可以适当设定为175[deg/秒]~778[deg/秒]的范围的值。例如,考虑齿轮比为20.5、共振频率为25hz、主要产生1次成分的误差的情况。相当于共振频率25hz的转向速度为360[deg]
×
25[hz]/20.5=439[deg/秒]。可以将第一转向速度阈值thω1设为比439[deg/秒]低的400[deg/秒]。
[0115]
另外,关于误差阈值teo,也可以根据系统而适当设定。例如,在正常的正弦信号sin1和余弦信号cos1是以2.5[v]为基准以振幅1.5[v]增减的信号的情况下(即,sin1=1.5
×
sinθ+2.5[v],cos1=1.5
×
cosθ+2.5[v])的情况下,可以将误差阈值teo设定为10[mv]。
[0116]
这样,在偏移误差的绝对值|eos|、|eoc|为误差阈值teo以上的情况下,转移到修正实施模式,由此在误差处于通常的偏差范围内的情况下抑制修正。由此,防止由于频繁的修正反而损害舒适性的情况。
[0117]
另外,修正实施条件除了满足条件(1)和(2)之外,也可以满足以下的条件(a3)和(a4)中的一者或两者。
[0118]
(a3)电流指令值iref=(idref2+iqref2)
1/2
为电流阈值ti以上。
[0119]
(a4)车速vh为车速阈值tv以下。
[0120]
关于条件(a3),电流指令值iref与马达10产生的转向辅助转矩等价。因此,在电流指令值iref为电流阈值ti以上的情况下,转移到修正实施模式,由此,在来自马达10的输出转矩大、容易产生大的振动的状态下,能够抑制由正弦信号sin1和余弦信号cos1的误差引起的振动。
[0121]
电流阈值ti可以根据系统而适当设定,例如可以是20[a]。也可以代替电流指令值iref,而将转矩指令值tref为阈值以上作为条件(a3)。
[0122]
另外,关于条件(a4),在车速vh为车速阈值tv以下的情况下转变为修正实施模式,由此,在需要较大的转向辅助力而从马达10产生的振动容易变大的低速时,能够抑制由正弦信号sin1以及余弦信号cos1的误差引起的振动。车速阈值tv可以根据系统而适当设定,
例如可以是15[km/h]。
[0123]
另外,也可以将上述的条件(a2)置换为以下的条件(a5)。
[0124]
(a5)已校正正弦信号sin2与已校正余弦信号cos2的振幅误差ea为误差阈值tea以上。
[0125]
误差阈值tea也可以根据系统而适当设定。例如,可以设定为正常的正弦信号sin1及余弦信号cos1的振幅的约0.6%。
[0126]
另外,也可以将上述的条件(a2)置换为以下的条件(a6)。
[0127]
(a6)偏移误差的绝对值|eos|或|eoc|为误差阈值teo以上,且振幅误差ea为误差阈值tea以上。
[0128]
另一方面,例如修正无效条件可以满足以下的条件(b1)。
[0129]
(b1)转向速度ω小于第二转向速度阈值thω2。
[0130]
第二转向速度阈值thω2可以是与第一转向速度阈值thω1相同的值,也可以将第二转向速度阈值thω2设定为比第一转向速度阈值thω1小的值,使动作模式具有滞后特性。例如,在第一转向速度阈值thω1为400[deg/秒]的情况下,可以将第二转向速度阈值thω2设定为300[deg/秒]。
[0131]
参照图9。在修正实施模式中,修正控制部73将偏移误差eos、偏移误差eoc、振幅误差ea分别作为第二正弦偏移修正值cofs1、第二余弦偏移修正值cofc1、第二振幅修正增益g2输出。
[0132]
此外,修正控制部73也可以将第二正弦偏移修正值cofs1、第二余弦偏移修正值cofc1、第二振幅修正增益g2的大小限制为各自的上限值以下。由此,能够防止对由于传感器的故障而导致的误差进行修正。
[0133]
第二正弦偏移修正部74基于第二正弦偏移修正值cofs1对已校正正弦信号sin2进行修正。具体而言,通过从已校正正弦信号sin2减去第二正弦偏移修正值cofs1,来运算正弦信号sin。
[0134]
第二余弦偏移修正部75基于第二余弦偏移修正值cofc1对已校正余弦信号cos2进行修正。具体而言,通过从已校正余弦信号cos2减去第二余弦偏移修正值cofc1来运算余弦信号cos3。
[0135]
第二振幅误差修正部76基于第二振幅修正增益g2对已校正正弦信号sin2与已校正余弦信号cos2之间的振幅误差进行修正。
[0136]
具体而言,通过对从第二余弦偏移修正部75输出的余弦信号cos3乘以第二振幅修正增益g2来运算余弦信号cos。
[0137]
由此,在修正实施模式中,检测信号修正部50对已校正正弦信号sin2和已校正余弦信号cos2的偏移误差eos、eoc以及振幅误差ea进行修正。
[0138]
另一方面,在通常模式下,修正控制部73将第二正弦偏移修正值cofs1和第二余弦偏移修正值cofc1的值设定为“0”,将第二振幅修正增益g2的值设定为“1”。因此,从第二正弦偏移修正部74和第二振幅误差修正部76,已校正正弦信号sin2和已校正余弦信号cos2不被修正而作为正弦信号sin和余弦信号cos输出。即,不修正偏移误差eos、eoc以及振幅误差ea。
[0139]
加法器77运算正弦信号sin和余弦信号cos的和信号(cos+sin),并输出到旋转角
度运算部51(参照图4)。
[0140]
减法器78运算正弦信号sin和余弦信号cos的差信号(cos-sin),并输出到相位误差修正部79。
[0141]
相位误差修正部79通过对差信号(cos-sin)乘以相位修正增益g3,从和信号(cos+sin)和差信号(cos-sin)中去除正弦信号sin1与余弦信号cos1之间的相位误差的影响。相位误差修正部79将差信号(cos-sin)输出至旋转角度运算部51。
[0142]
(动作)
[0143]
接着,参照图11说明实施方式的检测信号修正方法的一例。
[0144]
在步骤s1中,旋转角度运算部51运算马达10的旋转轴的旋转角度的测量值即测量角度θm。直线性修正部52及原点修正部53分别通过对测量角度θm的直线性误差及相位偏离量进行修正来运算修正后旋转角度θc。
[0145]
在步骤s2中,转向速度运算部55通过以减速齿轮3的齿轮比除以修正后旋转角度θc来运算转向轴2的转向角θh,对转向角θh进行微分来运算转向速度ω。
[0146]
在步骤s3中,车速传感器8检测车辆的车速vh。
[0147]
在步骤s4中,转矩指令值运算部60运算转矩指令值tref,电流指令值运算部62计算与转矩指令值tref对应的d轴电流指令值idref及q轴电流指令值iqref。
[0148]
在步骤s5中,误差运算部56运算已校正正弦信号sin2的偏移误差eos、已校正余弦信号cos2的偏移误差eoc以及已校正正弦信号sin2与已校正余弦信号cos2的振幅误差ea。检测信号修正部50的修正控制部73将偏移误差eos、eoc、振幅误差ea分别作为第二正弦偏移修正值cofs1、第二余弦偏移修正值cofc1、第二振幅修正增益g2进行学习。
[0149]
在步骤s6中,修正控制部73判定检测信号修正部50的动作模式是否为通常模式。在动作模式为通常模式的情况下(步骤s6:是),处理进入步骤s7。在动作模式不是通常模式而是修正实施模式的情况下(步骤s6:否),处理进入步骤s11。
[0150]
在步骤s7中,修正控制部73判定修正实施条件是否成立。在修正实施条件成立的情况下(步骤s7:是),处理进入步骤s8。在修正实施条件不成立的情况下(步骤s7:否),处理进入步骤s10。
[0151]
在步骤s8中,修正控制部73使检测信号修正部50的动作模式转变为修正实施模式。
[0152]
在步骤s9中,第二正弦偏移修正部74、第二余弦偏移修正部75和第二振幅误差修正部76根据学习到的第二正弦偏移修正值cofs1、第二余弦偏移修正值cofc1、第二振幅修正增益g2,对已校正正弦信号sin2和已校正余弦信号cos2的偏移误差eos、eoc和振幅误差ea进行修正。然后,处理进入步骤s15。
[0153]
另一方面,在步骤s10中,修正控制部73废弃学习到的第二正弦偏移修正值cofs1、第二余弦偏移修正值cofc1、第二振幅修正增益g2。具体而言,修正控制部73将第二正弦偏移修正值cofs1和第二余弦偏移修正值cofc1的值设定为“0”,将第二振幅修正增益g2的值设定为“1”,由此不进行修正。然后,处理进入步骤s15。
[0154]
在检测信号修正部50的动作模式是修正实施模式的情况下(步骤s6:否),在步骤s11中,修正控制部73判定修正无效条件是否成立。在修正无效条件成立的情况下(步骤s11:是),处理进入步骤s12。在修正无效条件不成立的情况下(步骤s11:否),处理进入步骤
s14。
[0155]
在步骤s12中,修正控制部73废弃学习到的第二正弦偏移修正值cofs1、第二余弦偏移修正值cofc1、第二振幅修正增益g2。具体而言,修正控制部73将第二正弦偏移修正值cofs1和第二余弦偏移修正值cofc1的值设定为“0”,将第二振幅修正增益g2的值设定为“1”,由此不进行修正。
[0156]
在步骤s13中,使检测信号修正部50的动作模式转变为通常模式。然后,处理进入步骤s15。
[0157]
另一方面,在步骤s14中,第二正弦偏移修正部74、第二余弦偏移修正部75和第二振幅误差修正部76根据学习到的第二正弦偏移修正值cofs1、第二余弦偏移修正值cofc1、第二振幅修正增益g2,对已校正正弦信号sin2和已校正余弦信号cos2的偏移误差eos、eoc和振幅误差ea进行修正。然后,处理进入步骤s15。
[0158]
在步骤s15中,控制装置30判定点火钥匙信号是否断开。在点火钥匙信号未断开的情况下(步骤s15:否),处理返回步骤s1。在点火钥匙信号断开的情况下(步骤s15:是),处理结束。
[0159]
(实施方式的效果)
[0160]
(1)传感器单元20输出与马达10的旋转轴11的旋转对应的正弦信号以及余弦信号,该马达10对车辆的转向轴2赋予转向辅助转矩。旋转角度运算部51基于正弦信号以及余弦信号来运算旋转轴11的旋转角度。转向速度运算部55基于旋转角度来运算转向轴2的转向速度。误差运算部56运算正弦信号及余弦信号的误差。在转向速度为转向速度阈值以上且正弦信号及余弦信号的误差为误差阈值以上的情况下,检测信号修正部50对正弦信号及余弦信号的误差进行修正。
[0161]
由此,在容易产生车辆的共振频率的振动的转向速度下,能够抑制由正弦信号及余弦信号的误差引起的马达10的振动。其结果,能够减轻车辆因马达10产生的振动而共振,作为异音、振动传递给驾驶员而损害舒适性的情况。
[0162]
(2)检测信号修正部50还可以在施加于转向轴2的转向辅助转矩为阈值以上的情况下,对正弦信号及余弦信号的误差进行修正。由此,在来自马达10的输出转矩大、容易产生大的振动的状态下,能够抑制由正弦信号及余弦信号的误差引起的振动。
[0163]
(3)检测信号修正部50还可以在车辆的车速为车速阈值以下的情况下,对正弦信号及余弦信号的误差进行修正。由此,在需要大的转向辅助力而从马达10产生的振动容易变大的低速时,能够抑制由正弦信号及余弦信号的误差引起的振动。
[0164]
(4)正弦信号及余弦信号的上述误差可以是正弦信号及余弦信号的偏移、或者正弦信号与余弦信号之间的振幅误差。由此,能够对分别对基于正弦信号及余弦信号运算出的旋转角度的直线性误差的1次成分以及2次成分产生影响的偏移以及振幅误差进行修正。
[0165]
标号说明
[0166]
1:转向方向盘;2:转向轴;3:减速齿轮;4a、4b:万向接头;5:小齿轮齿条机构;6:横拉杆;7:转矩传感器;8:车速传感器;10:马达;11:旋转轴;20:传感器单元;21:磁体;22:电路基板;23:支承部件;24:mr传感器元件;25:线束;30:控制装置;31:处理器;32:存储装置;33、34:模数转换器;35:驱动电路;36:电流传感器;37:i/f电路;40:电池;41:钥匙;50:检测信号修正部;51:旋转角度运算部;52:直线性修正部;53:原点修正部;54:马达控制部;55:
转向速度运算部;56:误差运算部;60:转矩指令值运算部;61:微分器;62:电流指令值运算部;63:3相/2相转换部;64、65、78:减法器;66、67:pi控制部;68:2相/3相转换部;69:pwm控制部;70:第一正弦偏移修正部;71:第一余弦偏移修正部;72:第一振幅误差修正部;73:修正控制部;74:第二正弦偏移修正部;75:第二余弦偏移修正部;76:第二振幅误差修正部;77:加法器;79:相位误差修正部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1