基于残差神经网络与集成学习的飞行时间预测方法及装置
本发明涉及一种飞行器飞行时间预测方法,属于飞行器控制。
背景技术:
1、制导律直接关系到飞行器的射程、射击精度、生存能力、毁伤效果等,是飞行器设计的重要内容之一。
2、而制导律大都依赖飞行时间预测,飞行时间预测越精准,制导精度越高。
3、传统的飞行时间预测,可以分为两种:解析法和数据法。解析法引入一些假设条件,使剩余飞行时间能够以解析式的形式求解,但是解析法对引入的假设条件敏感,预测精度普遍较低;数据法为采集大量的导弹飞行数据,通过插值、拟合等数值计算方法获得,但由于不同型号的飞行器数据存在差异,数据法需要对每种飞行器型号都采集大量数据,会带来较高的成本。
4、由于上述原因,有必要提出了一种能够解决上述问题之一的飞行器飞行时间的预测方法。
技术实现思路
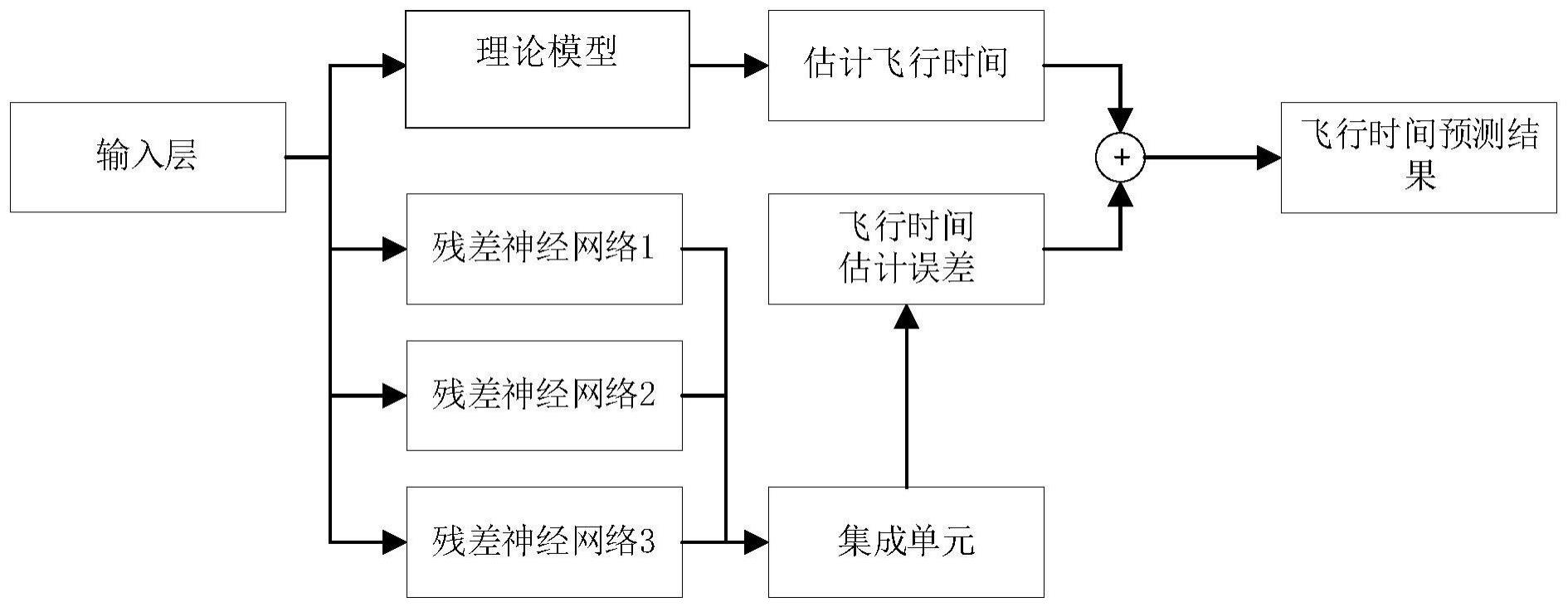
1、为了克服上述问题,本发明人进行了深入研究,设计出一种基于残差神经网络与集成学习的飞行时间预测方法通过理论模型获取飞行器理论飞行时间,通过集成单元将多个残差神经网络模型集成为总模型,通过总模型对新型飞行器的实际飞行时间与理论飞行时间误差进行预测,进而获得预测飞行时间,根据预测飞行时间获得制导律,该新型飞行器在制导律的控制下向目标飞行;
2、所述残差神经网络为能够对已知飞行器实际飞行时间与理论飞行时间误差进行预测的模型,不同的残差神经网络模型对应不同的已知飞行器,
3、所述集成单元用于不同的残差神经网络模型预测结果按一定权值进行整合,
4、所述已知飞行器是指已具有大量飞行轨迹数据的飞行器,所述新型飞行器是指未获得大量飞行轨迹数据的飞行器,所述大量飞行轨迹是指超过100条飞行轨迹。
5、在一个优选的实施方式中,所述理论模型以飞行器当前状态为自变量估计飞行器理论飞行时间,所述残差神经网络模型输入为飞行器当前状态的初始条件,输出为飞行器理论飞行时间相对真实值的误差。
6、在一个优选的实施方式中,所述理论模型表示为:
7、
8、其中,表示飞行器理论飞行时间,θ表示速度方向角,λ表示视线角,r表示飞行器与目标的距离。
9、所述残差神经网络模型的残差神经网络隐藏层cj表示为:
10、
11、其中,r表示隐藏层的输入,c表示隐藏层的输出,w表示隐藏层的权值,b表示隐藏层的偏移量,下标j表示隐藏层的编号,下标i表示隐藏层j中的第i个神经元。4.根据权利要求1所述的基于残差神经网络与集成学习的飞行时间预测方法,其特征在于,
12、所述集成单元表示为:
13、
14、其中,ye为集成后的输出值,为不同残差神经网络预测模型的输出值,为不同残差神经网络模型的集成权重。
15、在一个优选的实施方式中,保持残差神经网络模型中输入层和隐藏层的参数不变,以新型飞行器的至少一条飞行轨迹数据为训练样本对总模型进行训练,确定集成单元中集成权重的取值,以训练后的总模型对新型飞行器的实际飞行时间与理论飞行时间误差预测。
16、在一个优选的实施方式中,对总模型进行训练时,损失函数je设置为:
17、
18、其中,ne表示残差神经网络模型的数量,ie表示不同的残差神经网络模型,ye表示不同残差神经网络模型的输出值,表示与残差神经网络输出对应的样本的真实输出值。
19、在一个优选的实施方式中,对总模型进行训练时,集成单元的梯度设置为:
20、
21、其中,α为所需训练的参数,包括不同残差神经网络模型的集成权重和不同残差神经网络模型的偏移量
22、在一个优选的实施方式中,对总模型进行训练时,通过下式进行参数更新:
23、αk+1=αk-γege
24、其中,αk表示更新前参数,αk+1表示更新后参数,γe表示总模型学习率,ge表示集成单元梯度。
25、在一个优选的实施方式中,残差神经网络模型训练时的学习率为总模型训练时学习率的5~15倍。
26、另一方面,本发明还提供了一种基于残差神经网络与集成学习的飞行时间预测装置,在飞行器的机载计算机中设置有如上述实施方式之一所述的理论模型和总模型。
27、本发明所具有的有益效果包括:
28、(1)融合了解析法与数据法的特点;
29、(2)能够实现对新型飞行器的剩余飞行时间预测;
30、(3)该预测方法降低了对新型号飞行器飞行数据量的要求,节约了数据采集的成本;
31、(4)该方法预测结果准确,对飞行器机载计算机要求低。
技术特征:
1.一种基于残差神经网络与集成学习的飞行时间预测方法,其特征在于,通过理论模型获取飞行器理论飞行时间,通过集成单元将多个残差神经网络模型集成为总模型,通过总模型对新型飞行器的实际飞行时间与理论飞行时间误差进行预测,进而获得预测飞行时间,根据预测飞行时间获得制导律,该新型飞行器在制导律的控制下向目标飞行;
2.根据权利要求1所述的基于残差神经网络与集成学习的飞行时间预测方法,其特征在于,
3.根据权利要求2所述的基于残差神经网络与集成学习的飞行时间预测方法,其特征在于,
4.根据权利要求1所述的基于残差神经网络与集成学习的飞行时间预测方法,其特征在于,
5.根据权利要求4所述的基于残差神经网络与集成学习的飞行时间预测方法,其特征在于,
6.根据权利要求4所述的基于残差神经网络与集成学习的飞行时间预测方法,其特征在于,
7.根据权利要求4所述的基于残差神经网络与集成学习的飞行时间预测方法,其特征在于,
8.根据权利要求4所述的基于残差神经网络与集成学习的飞行时间预测方法,其特征在于,
9.根据权利要求4所述的基于残差神经网络与集成学习的飞行时间预测方法,其特征在于,
10.一种基于残差神经网络与集成学习的飞行时间预测装置,其特征在于,在飞行器的机载计算机中设置有如权利要求1~9之一所述的理论模型和总模型。
技术总结
本发明公开了一种基于残差神经网络与集成学习的飞行时间预测方法,通过集成单元将多个残差神经网络模型集成为总模型,通过总模型对新型飞行器的实际飞行时间与理论飞行时间误差进行预测;其中,所述残差神经网络为能够对已知飞行器实际飞行时间与理论飞行时间误差进行预测的模型,集成单元用于不同的残差神经网络模型预测结果按一定权值进行整合,已知飞行器是指已具有大量飞行轨迹数据的飞行器,新型飞行器是指未获得大量飞行轨迹数据的飞行器。该发明公开的基于残差神经网络与集成学习的飞行时间预测方法,降低了对新型号飞行器飞行数据量的要求,节约了数据采集的成本,预测结果准确率高。
技术研发人员:王江,刘子超,何绍溟,侯淼,王鹏,范世鹏,李晨迪
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!