一种基于分布式光学的激光导引头及火箭弹的制作方法
1.本发明涉及非制导火箭弹技术领域,具体涉及一种基于分布式光学的激光导引头及火箭弹。
背景技术:
2.非制导火箭弹存在精度低的突出问题。以美国的“九头蛇-70”火箭弹为例:在最大射程6km下,其圆概率偏差高达100m左右;要命中6km外坦克大小的目标,理论上需要发射100多枚火箭弹;其综合命中成本过高,并且会容易暴露发射载机。一枚精确制导导弹成本高达50万元以上,当精确制导导弹对付低成本目标时,经济性太差,不适合大规模应用。因此,对库存的大量非制导武器进行低成本、精确制导改变尤为重要。
3.对于非制导武器如火箭弹的精确制导改造,如果加装目前常用的位于弹体最前端的激光半主动/红外/可见光等类型的导引头,会改变原有战斗部及引信的设计,则需要重新计算、验证毁伤效果。同时,火箭弹发射时,其尾焰会污染相邻火箭弹的头罩部分,导致其接收回波信号受影响。
4.现有技术中,还没有成熟简单、性价比高的火箭弹制导化改造方案。
技术实现要素:
5.为解决上述问题,本发明实施例提供了一种基于分布式光学的激光导引头和火箭弹,旨在解决对非制导火箭弹进行低成本、精确制导改造的问题。
6.本发明实施例采用下述技术方案:
7.第一方面,提供了一种基于分布式光学的激光导引头,包括:分布式光学系统、以及激光采集及处理系统;
8.分布式光学系统,用于接收目标的漫反射光信号,对漫反射光信号汇聚后得到激光信号,将激光信号变换后照射至激光采集及处理系统;
9.激光采集及处理系统,用于对变换后的激光信号进行处理后确定偏差角;
10.其中,分布式光学系统包括:4个光学组件、光纤组件、以及导光组件;
11.每个光学组件,用于接收目标的漫反射光信号,对漫反射光信号进行汇聚后得到激光信号,将激光信号投射到光纤组件相对应的各输入端;
12.光纤组件,用于通过各输入端接收激光信号,将激光信号变换后传导至导光组件;
13.导光组件,用于将接收的变换后的激光信号低损耗照射至激光采集及处理系统。
14.可选的,每个光学组件包括:依次设置的头罩、窄带滤光片、以及3个物镜;
15.其中,头罩,用于保护窄带滤光片以及3个物镜;
16.窄带滤光片,用于透过第一预设波长范围的漫反射光信号;
17.每个物镜,用于对第一预设波长范围的漫反射光信号进行汇聚。
18.可选的,头罩、窄带滤光片、以及3个物镜的表面进行增透处理。
19.可选的,光纤组件包括:4组光纤束;
20.其中,4组光纤束的输入端分别接收相对应的4个光学组件投射的激光信号;
21.每组光纤束的输入端通过十字分割形式分为4个光束区;
22.各组光纤束的第一光束区合并为光纤组件输出端的第一象限,各组光纤束的第二光束区合并为光纤组件输出端的第二象限,各组光纤束的第三光束区合并为光纤组件输出端的第三象限,各组光纤束的第四光束区合并为光纤组件输出端的第四象限;
23.光纤组件输出端的各象限将变换后的激光信号传导至导光组件。
24.可选的,光纤组件的各输入端以及输出端进行抛光处理,并设置增透膜。
25.可选的,对光纤组件的光纤束进行熔融处理。
26.可选的,光纤组件的单纤直径为50μm,各组光纤束的直径为3.5mm。
27.可选的,导光组件与光纤组件紧密贴合,导光组件外壁设置全反射膜。
28.可选的,激光采集及处理系统包括:电源模块、探测器、前置放大电路、以及信号采样及处理电路;
29.电源模块分别为前置放大电路和信号采样及处理电路供电;
30.探测器,用于接收导光组件照射来的变换后的激光信号;
31.前置放大电路,用于对变换后的激光信号进行放大处理;
32.信号采样及处理电路,用于将放大后的激光信号变换成电流信号,将电流信号变换为可采集的电压信号,对电压信号的峰值进行采样,从而确定偏差角。
33.第二方面,提供了一种火箭弹,包括:上述的基于分布式光学的激光导引头、战斗部及引信、控制舱、以及发动机;
34.火箭弹从头部至尾部依次连接战斗部及引信、基于光学的激光导引头和控制舱、以及发动机;
35.其中,分布式激光导引头与控制舱集成于一体,4个光学组件分布隐藏于控制舱的4个控制舵翼内。
36.本发明实施例采用的上述至少一个技术方案能够达到以下有益效果:
37.本发明的基于分布式光学的激光引导头,四个光学组件采用分布式布局方式,使基于分布式光学的激光导引头无需安装在弹体最前端,火箭弹改造时无需改变战斗部及引信。采用该分布式布局方式,四个光学组件在发射之前可随舵翼一起隐藏于弹体内部,不受相邻弹药发射尾焰影响。
38.本发明的基于分布式光学的激光引导头,采用光纤传导的方式将四个光学组件汇聚的激光信号经变换后传导至探测器光敏面上。使用柔性可弯折的光纤束使四个光学组件可以随舵翼一起动作。
39.本发明的基于分布式光学的激光导引头,光纤组件采用四组光纤束,每组光纤束以十字分割形式分为四个光束区。通过象限变换的排列方式将分立的四个光学组件汇聚的激光信号进行重组并由一个输出端口照射进探测器。
40.本发明的基于分布式光学的激光导引头,可以综合采用光纤熔融、增大折弯半径、端面镀膜、选用高占空比光纤等方式来提高光纤组件的透过率。
41.本发明的基于分布式光学的激光导引头,可通过导光组件有效减小光纤组件输出端光线的发散角,从而避免光纤组件输出端的光斑在探测器光敏面上产生串扰的问题。
附图说明
42.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
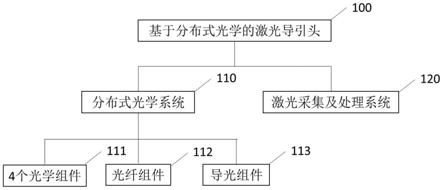
43.图1示出根据本发明的一个实施例的基于分布式光学的激光导引头的组成示意图;
44.图2示出根据本发明的一个实施例的一个光学组件的结构示意图;
45.图3示出根据本发明的一个实施例的一个光学组件的实物图;
46.图4示出根据本发明的一个实施例的光纤组件的结构示意图;
47.图5示出根据本发明的一个实施例的光纤组件的光纤束熔融之后的效果图;
48.图6示出根据本发明的一个实施例的光纤组件的不同单纤直径及不同光纤束直径对应的允许折弯半径;
49.图7示出根据本发明的一个实施例的光纤组件的不同折弯半径对应的损耗率曲线;
50.图8示出根据本发明的一个实施例的光纤组件的实物图;
51.图9示出根据本发明的一个实施例的导光组件的光路示意图;
52.图10示出根据本发明的一个实施例的分布式光学系统的原理框图;
53.图11示出根据本发明的一个实施例的分布式光学系统的实物图;
54.图12示出根据本发明的一个实施例的激光采集及处理系统的组成示意图;
55.图13示出根据本发明的一个实施例的光学组件的入射角度与能量占比关系图;
56.图14示出根据本发明的一个实施例的光学组件的线性区仿真曲线;
57.图15示出根据本发明的一个实施例的火箭弹的结构示意图。
具体实施方式
58.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明具体实施例及相应的附图对本发明技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
59.首先,对现有的半主动导引头进行介绍。
60.现有的半主动激光导引头采用一个光学镜头置于最前端,通过光学镜头的汇聚,将激光反射信号汇聚到探测器上。现有常规布局的半主动激光导引头在火箭弹改造上存在如下缺点:
61.第一、战斗部及引信改动大。采用现有的半主动激光导引头对火箭弹改造必须重新设计战斗部及引信,需要重新进行毁伤效果的计算于验证,改造周期较长、难度较大。
62.第二、容易受相邻火箭弹发射影响。常规布局的半主动激光导引头位于弹体的最前端,相邻弹药发射时,其尾焰会污染头罩造成激光接收异常。
63.第三、改造费用大。采用常规布局的半主动激光导引头进行改造,需要对火箭弹的整体布局进行改动,改造难度大、费用高。
64.针对上述弊端,本发明的技术构思在于:只需将待改造的火箭弹前端拆下,将基于分布式光学的激光引导头加装到发动机舱段,将原有的战斗部及引信组装到基于分布式光
学的激光导引头上,即可实现火箭弹的低成本、精确制导改进。本发明的改造方案简便、不改变战斗部及引信,且避免了光学组件受相邻弹药发射的影响。
65.以下结合附图,详细说明本发明各实施例提供的技术方案。
66.图1示出了根据本发明一个实施例的基于分布式光学的激光导引头的组成示意图。如图1所示,本发明的基于分布式光学的激光导引头100包括:分布式光学系统110、以及激光采集及处理系统120。分布式光学系统110,用于接收目标的漫反射光信号,对漫反射光信号汇聚后得到激光信号,将激光信号变换后照射至激光采集及处理系统120。激光采集及处理系统120,用于对变换后的激光信号进行处理后确定偏差角。
67.其中,分布式光学系统110包括:四个光学组件111、光纤组件112、以及导光组件113。每个光学组件111,用于接收目标的漫反射光信号,对漫反射光信号进行汇聚后得到激光信号,将激光信号投射到光纤组件112相对应的各输入端1121。光纤组件112,用于通过各输入端1121接收激光信号,将激光信号变换后传导至导光组件113。导光组件113,用于将接收的变换后的激光信号低损耗照射至激光采集及处理系统120。
68.相较于目前常规的半主动激光导引头,本发明的技术方案重点在于对分布式光学系统110进行了改造。分布式光学系统110由四个光学组件111、光纤组件112、以及导光组件113组成。以下,对分布式光学系统110进行详细介绍。
69.第一部分,四个光学组件111。
70.每个光学组件111的主要作用是接收目标的漫反射光信号,对漫反射光信号进行汇聚后得到激光信号,将激光信号投射到光纤组件112相对应的各输入端1121。
71.图2示出了根据本发明一个实施例的一个光学组件的结构示意图。本发明的四个光学组件111的结构均相同。如图2所示,作为一种可选的实施方式,每个光学组件111包括:依次设置的头罩1111、窄带滤光片1112、以及三个物镜1113。头罩1111,用于保护窄带滤光片1112及三个物镜1113。窄带滤光片1112,用于透过第一预设波长范围的漫反射光信号。每个物镜1113,用于对第一预设波长范围的漫反射光信号进行汇聚。
72.以图2所示的方向为例,从左往右依次为头罩1111、窄带滤光片1112、以及三个物镜1113,漫反射光信号的入射方向为左侧。头罩1111主要起到保护作用同时具有一定的光纤汇聚作用。窄带滤光片1112只允许透过第一预设波长范围的漫反射光信号。三个物镜1113的主要作用是对第一预设波长范围内的漫反射光信号进行汇聚。
73.在一种可能的情形下,每个光学组件111的第一预设波长范围:1064nm
±
10nm;光学组件111的透过率tn:≥90%;通光口径:11mm。
74.作为一种可选的实施方式,头罩1111、窄带滤光片1112、以及三个物镜1113的表面进行增透处理。为了提高光学组件111的透过率,对头罩1111、窄带滤光片1112以及三个物镜1113的所有表面全部进行增透处理。
75.图3示出了根据本发明一个实施例的一个光学组件的实物图。
76.第二部分,光纤组件112。
77.光纤组件112的主要作用是通过各输入端1121接收四个光学组件111各自汇聚的激光信号,通过重新整合变换后传导至导光组件113。
78.图4示出了根据本发明一个实施例的光纤组件的结构示意图。如图4所示,光纤组件112包括:四组光纤束。四组光纤束的输入端1121分别接收相对应的四个光学组件111投
射的激光信号。每组光纤束的输入端1121通过十字分割形式分为四个光束区。各组光纤束的第一光束区合并为光纤组件112输出端1122的第一象限,各组光纤束的第二光束区合并为光纤组件112输出端1122的第二象限,各组光纤束的第三光束区合并为光纤组件112输出端1122的第三象限,各组光纤束的第四合并为光纤组件112输出端1122的第四象限。光纤组件112输出端1122的各象限将变换后的激光信号传导至导光组件113。
79.光纤组件112采用多股光纤束排列的方式实现激光信号的接收、变换及传递功能。参照图4,光纤组件112由四组光纤束组成,分别命名为a/b/c/d光纤束。每个光纤束的输入端1121通过十字分割的形式被分为四个光束区,分别命名为x1/x2/x3/x4(其中x为a/b/c/d)。在输出端1122将总共十六个光束区进行重新排列:a1、b1、c1、d1合并为光纤组件112输出端1122的第一象限,a2、b2、c2、d2合并为光纤组件112输出端1122的第二象限,a3、b3、c3、d3合并为光纤组件112输出端1122的第三象限,a4、b4、c4、d4合并为光纤组件112输出端1122的第四象限。
80.在实际使用时,基于分布式光学的激光导引头100距离目标的距离相对于四个光学组件111的距离比值非常大,可以近似认为目标的漫反射光信号入射到四个光学组件111的角度完全一致。基于此,漫反射光信号经过各光学组件111之后形成的激光信号的光斑大小和落在光纤组件112各输入端1121的形状一致。光纤组件112的各输入端1121第一光束区接收的激光信号的光斑能量合并到一起传输到输出端1122的第一象限,其余几个光束区原理相同。对于只关注每个象限激光信号能量的分布式光学系统110可等效于入射面积为单个光学组件111入射面积的四倍。
81.作为一种可选的实施方式,光纤组件112的各输入端1121以及输出端1122进行抛光处理,并设置增透膜。为了提高光纤组件112的透过率,对光纤组件112的光纤束端头进行抛光处理,镀增透膜。
82.作为一种可选的实施方式,对光纤组件112的光纤束进行熔融处理。为了提高光纤组件112的透过率,提高光纤束的占空比。现有技术可实现的最高占空比约为70%左右,对光纤束采用熔融技术之后,占空比可以提升至85%~89%左右。图5示出了本发明一个实施例的光纤组件的光纤束熔融之后的效果图。
83.作为一种可选的实施方式,光纤组件112的单纤直径为50μm,各组光纤束的直径为3.5mm。在本发明中,光纤组件的单纤直径和各组光纤束的直径并不限制于上述尺寸。在实际情况下,光纤组件的单纤直径可根据需要任意调整,只要满足机械尺寸要求即可。各组光纤束的尺寸亦可根据需要灵活设置。但是需考虑到光纤存在折弯损耗,图6示出了本发明一个实施例的不同单纤直径及不同光纤束直径对应的允许折弯半径,图7示出了本发明一个实施例的不同折弯半径对应的损耗率曲线。结合图6和图7所示,当光纤组件112的单纤直径为50μm、各组光纤束的直径为3.5mm时,允许的折弯半径为9mm。在一种可能的实际情形中,折弯半径设为10mm时,损耗可以忽略不计。因此光纤组件的单纤直径为50μm,各组光纤束的直径为3.5mm的尺寸是一种优选的尺寸选择。
84.光纤组件112的实际透过率根据其影响因素透过率评估。使用如下公式1计算光纤组件112的透过率:
85.tm=t1×
t2。
ꢀꢀ
(公式1)
86.其中,tm为光纤组件112的透过率,t1为占空比衰减,t2为输出端面耦合效率。
87.在一种可能的实际情形中,对光纤采用熔融技术后占空比达到85%,对光纤束端头表面镀膜后断面耦合效率达到95%,据此光纤组件112的实际透过率达到tm=85%
×
95%=80.7%。
88.图8示出了本发明的一个实施例的光纤组件的实物图。
89.第三部分,导光组件113。
90.导光组件113的主要作用是将光纤组件112传导的变换后的激光信号以尽量低的损耗照射至激光采集及处理系统120,以缩小变换后的激光信号的光斑的发散角,避免象限间的串扰。
91.图9示出了本发明的一个实施例的导光组件的光路示意图。结合图9所示,导光组件113与光纤组件112紧密贴合,导光组件113外壁设置全反射膜。
92.导光组件113采用全反射导光棒的形式,可以为一圆柱体,该圆柱体的外壁镀覆全反射铝膜。导光组件113与光纤组件112紧密贴合,保证光纤组件112传导出的变换后的激光信号全部进入导光组件113。变换后的激光信号在导光组件113的外壁全反射向前传导,最终以相同的入射角度照射至激光采集及处理系统120。经过仿真软件的模拟计算,导光组件113的透过率td达到92%。
93.图10示出了本发明的一个实施例的分布式光学系统的原理框图。根据图10所示,作为一种可选的实施方式,本发明的分布式光学系统110的工作原理为:由四个光学组件111接收目标的漫反射光信号,对漫反射光信号分别汇聚后投射光纤组件112的各输入端1121;光纤组件112的输入端1121按照四象限分割要求分为四组光纤束,以完成光学组件111线性区和差算法;光纤组件112的输入端1121由四束经过严格分割的光纤束组成,光纤束经过光纤转阶段重新进行编排,形成四束混编的光纤束,混编的光纤束分别照射进入激光采集及处理系统120的一、二、三、四象限。
94.图11示出了本发明的一个实施例的分布式光学系统的实物图。
95.以下,对分布式光学系统110的总透过率进行分析。分布式光学系统110的系统透过率主要由光学组件111的透过率、光纤组件112的透过率、以及导光组件113的透过率三部分决定。使用如下公式2计算系统透过率:
96.tz=tn×
tm×
td。
ꢀꢀ
(公式2)
97.其中,tz为系统透过率,tn为光学组件111的透过率,tm为光纤组件112的透过率,td为导光组件113的透过率。在光学组件111的透过率为90.1%,光纤组件112的透过率为80.7%,导光组件113的透过率为92%的条件下,系统透过率为tz=90.1%
×
80.7%
×
92%=66.8%。
98.作为一种可选的实施方式,图12示出了本发明的一个实施例的激光采集及处理系统的组成示意图。如图12所示,激光采集及处理系统120包括:电源模块121、探测器122、前置放大电路123、以及信号采样及处理电路124。电源模块121分别为前置放大电路123和信号采样及处理电路124供电。探测器122,用于接收导光组件113照射来的变换后的激光信号。前置放大电路123,用于对变换后的激光信号进行放大处理。信号采样及处理电路124,用于将放大后的激光信号变换成电流信号,将电流信号变换为可采集的电压信号,对电压信号的峰值进行采样,从而确定偏差角。
99.激光采集及处理系统120包括的探测器122通过光敏面接收导光组件113照射来的
变换后的激光信号。导光组件113的输出端1122将变换后的每个象限的激光信号照射到探测器122对应的每个象限上。变换后的激光信号经前置放大电路123放大后传导至信号采样及处理电路124。信号采样及处理电路124将放大后的激光信号转换成电流信号,进一步处理为可采集的电压信号,并经过峰值保持电路及采样电路对脉冲信号峰值进行采样,最后计算得出相应的偏差角。
100.以下,对基于分布式光学的激光导引头100的技术指标进行详细介绍。基于分布式光学的激光导引头100的主要技术指标包括:视场、线性区、最大截获距离、盲区。
101.第一,基于分布式光学的激光导引头100的视场为
±
20
°
。
102.基于分布式光学的激光导引头100的视场由光学组件决定。根据激光导引头的一般经验,当照射到激光采集及处理系统120的变换后的激光信号的光斑投影能量占比约为50%时,基于分布式光学的激光导引头100将开始出现丢光现象。因此,以照射到激光采集及处理系统120的变换后的激光信号的光斑投影能量占比分析视场大小。图12示出了本发明的一个实施例的光学组件的入射角度与能量占比关系图。如图12所示,横轴为入射角度,纵轴为照射到激光采集及处理系统120的变换后的激光信号的光斑投影能量与总光斑能量之比。从图12可以看出,能量占比为50%时,入射角度约为20
°
,符合使用需求。因此基于分布式光学的激光导引头100的视场为
±
20
°
。
103.第二,基于分布式光学的激光导引头100的线性区为
±9°
。
104.基于分布式光学的激光导引头100的线性区由光学组件决定。光学组件的角度计算采用经典的和差公式,其公式3如下:
[0105][0106]
其中,θ为单个方向的角度计算值,分母部分为四象限的激光信号能量和,分子部分为正向两象限的能量和减去负向两象限的能量和,k为比例系数。参照公式3,如果s3和s4占比越来越少,角度值θ将越来越大;如果s3和s4之和的占比为0时,角度值θ将达到最大并保持不变。因此,光学组件的线性区的设计目标是:在大于等于线性区要求角度时,s3和s4之和的占比为0。依据此标准设计的光学组件线性区仿真曲线如图13所示。图13的横轴为入射角度,纵轴为s3和s4之和与四象限的激光信号能量和的比值。从图中可以看出,入射角度为10
°
时,s3和s4之和的占比为0,符合使用需求。因此基于分布式光学的激光导引头100的线性区为
±9°
。
[0107]
第三,基于分布式光学的激光导引头100的最大截获距离为4km。
[0108]
在一种可选的情形下,本发明的基于分布式光学的激光导引头100的使用条件为:激光照射能量80mj,激光脉冲宽度15ns,目标的漫反射系数0.2,大气能见度大于等于10km。
[0109]
当大气能见度为10km时,照射距离为5km,接收距离为5km,根据lowtran7软件计算大漆透过率为0.3。
[0110]
本发明的分布式光学系统110采用4个光学组件,每个光学组件的通光口径为11mm,等效到该分布式光学系统110,可认为该分布式光学系统110整体通光直径为22mm,该系统的系统透过率为66.8%。
[0111]
根据上述条件能够得出,在不同接收距离下照射到激光采集及处理系统120上的变换后的激光信号的总能量j
ρ
,j
ρ
是与接收距离相关的函数,其具体公式4如下:
[0112][0113]
其中,l为基于分布式光学的激光导引头100的接收距离,r为分布式光学系统110的整体通光半径,j为激光照射能量,τ1为目标的漫反射系数,τ2为大气透过率,τ3为系统透过率。
[0114]
本发明的激光采集与处理系统可探测到的最小接收能量为s
ρ
(脉冲宽度为15ns时),s
ρ
=12fj为已知值。令s
ρ
=j
ρ
即可确定出基于分布式光学的激光导引头100的最大截获距离4km。
[0115]
第四,基于分布式光学的激光导引头100的盲区为16m。
[0116]
在一种可选的情形下,激光刺激与处理系统具备48db的动态调节范围,则通过如下公式5确定出盲区值:
[0117][0118]
其中,aw为基于分布式光学的激光导引头100的动态调节范围,l
max
为基于分布式光学的激光导引头100的最大截获距离,l
min
为基于分布式光学的激光导引头100的盲区。在最大截获距离为4km,动态调节范围为48db的条件下,基于分布式光学的激光导引头100的盲区为16m。
[0119]
本发明的基于分布式光学的激光导引头100,相对于现有技术常规的单镜头组激光导引头,其结构与布置形式可以较好地解决火箭弹制导化改造面临的低成本、高效率、对战斗力无影响等问题。
[0120]
本发明的基于分布式光学的激光引导头,四个光学组件采用分布式布局方式,使基于分布式光学的激光导引头100无需安装在弹体最前端,火箭弹改造时无需改变战斗部及引信。采用该分布式布局方式,四个光学组件在发射之前可随舵翼一起隐藏于弹体内部,不受相邻弹药发射尾焰影响。
[0121]
本发明的基于分布式光学的激光引导头,采用光纤传导的方式将四个光学组件汇聚的激光信号经变换后传导至探测器122光敏面上。使用柔性可弯折的光纤束使四个光学组件可以随舵翼一起动作。
[0122]
本发明的基于分布式光学的激光导引头100,光纤组件112采用四组光纤束,每组光纤束以十字分割形式分为四个光束区。通过象限变换的排列方式将分立的四个光学组件汇聚的激光信号进行重组并由一个输出端口照射进探测器122。
[0123]
本发明的基于分布式光学的激光导引头100,可以综合采用光纤熔融、增大折弯半径、端面镀膜、选用高占空比光纤等方式来提高光纤组件112的透过率。
[0124]
本发明的基于分布式光学的激光导引头100,可通过导光组件113有效减小光纤组件112输出端1122光线的发散角,从而避免光纤组件112输出端1122的光斑在探测器122光敏面上产生串扰的问题。
[0125]
图15示出了本发明的一个实施例的火箭弹的结构示意图。如图15所示,火箭弹包括:上述基于分布式光学的激光导引头100、战斗部及引信200、控制舱300、以及发动机400。火箭弹从头部至尾部依次连接战斗部及引信200、基于光学的激光导引头和控制舱300、以及发动机400。分布式激光导引头与控制舱300集成于一体,四个光学组件分布隐藏于控制
舱300的四个控制舵翼内。
[0126]
在使用时,分布式激光导引头和控制舵翼集成在一起,四个光学组件分布在四个控制舵翼上,其整体安装于火箭弹的中部。安装时,先将火箭弹前端的战斗部及引信200拆下,然后将基于分布式光学的激光导引头100和控制舱300的组合加装到发动机400舱段上,最后再将战斗部及引信200装回最前端。该组装方式不会影响火箭弹原有战斗部及引信200的设计,同时四个光学组件随控制舵翼在发射之前隐藏于内部不会受到相邻火箭弹尾焰的影响。采用基于分布式光学的激光导引头,使得火箭弹所涉及的所有电路及软件无需作任何改动。采用基于分布式光学的激光导引头100可以非常方便的进行火箭弹改造,综合改造成本可控制在8万元左右,而达到同样效果的一枚导弹则需要至少50万元以上的费用。因此基于分布式光学的激光导引头100能够解决火箭弹的低成本、高效率、精确化制导改造问题。
[0127]
以上所述仅为本发明的实施例而已,并不用于限制本发明。对于本领域技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1