耐磨复合材料的制作方法
本公开总体上涉及耐磨复合结构。
背景技术:
1、通常期望使用软弹性垫来接触物体。例如,机器人手指可以在其指尖上配备有用于抓握物体的软垫。同样,逆照(retrographic)式传感器使用具有反射涂层的透明弹性体来捕获来自与传感器接触的物体的三维表面数据。在经过多次重复使用之后,此类装置可以由于与粗糙物体或环境污垢或砂砾接触而显示磨损,最终变得无法使用并且需要更换。这仍然需要可以在重复使用期间抵抗磨损的接触垫,例如作为逆照传感器或在机器人系统中的接触垫。
2、发明简述
3、复合材料将坚固、坚硬、低摩擦的表皮与软底层进行组合,共同提供优良的耐磨性。在一个方面中,所述复合结构可以由具有适合于逆照传感的光学轮廓的弹性材料形成。然而,所得到的复合材料也可以或替代地有利地用于一系列应用中,例如垫圈、密封件、夹具、机器人末端执行器等,这些应用将受益于柔韧、耐磨的接触表面。
4、在一个方面中,在本文中公开的用于与目标表面进行耐磨接触的装置可以包括:支撑结构;设置在所述支撑结构上的基材,所述基材具有不大于10的第一肖氏a硬度和至少1mm的第一厚度;以及设置在基材上用于与目标表面接触的膜。该膜可以包括:至少70的第二肖氏a硬度、不超过200μm的第二厚度、至少30兆帕的抗拉强度、至少650%的断裂伸长率和相对哑光(matte)钢不超过1.5的动摩擦系数。所述膜可以包含热塑性聚氨酯、热固性聚氨酯或丁腈橡胶。
5、在一个方面中,在本文中公开的用于与目标表面进行耐磨接触的装置可以包括:支撑结构;设置在所述支撑结构上的基材,所述基材具有不大于10的第一肖氏a硬度和至少1mm的第一厚度;以及设置在基材上用于与目标表面接触的膜。该膜可以包括:至少50的第二肖氏a硬度、不超过500μm的第二厚度、至少10兆帕的抗拉强度、至少300%的断裂伸长率和不超过1.5的与哑光钢的动摩擦系数。所述膜可以包含热塑性聚氨酯、热固性聚氨酯或丁腈橡胶。
6、在一个方面中,在本文中公开的装置可以包括:基材,该基材包含具有第一硬度的第一弹性体;和膜,该膜包含覆盖所述第一弹性体的基材的第一表面的第二弹性体。所述第二弹性体可以包括:(a)比所述第一弹性体的第一硬度更大的第二硬度;(b)高强度;和(c)在与所述第一弹性体的基材的第一表面背对的第二表面上的低摩擦系数。
7、实施可以包括以下特征中的一个或多个。所述第二弹性体的高强度可以包括大于所述第一弹性体的抗拉强度。所述第二弹性体的高强度可以包括大于所述第一弹性体的撕裂强度。所述第一弹性体和所述第二弹性体可以进行配置以提供耐磨弹性垫。所述第一弹性体可以具有不超过20的肖氏a硬度。所述第一弹性体可以具有不超过5的肖氏a硬度。所述第二弹性体可以具有至少30的肖氏a硬度。所述第二弹性体可以具有至少50的肖氏a硬度。所述膜可以具有在5μm和1000μm之间的厚度,包括端值。所述膜可以具有在20μm和400μm之间的厚度,包括端值。所述膜可以具有不超过500μm的厚度。所述膜可以具有不超过200μm的厚度。所述第一弹性体的基材可以具有大于500μm的厚度。所述第一弹性体的基材可以具有至少1mm的厚度。所述第二弹性体可以具有至少10兆帕的抗拉强度。所述第二弹性体可以具有至少20千牛顿/米的撕裂强度。所述第二弹性体可以具有至少30兆帕的抗拉强度。所述第二弹性体可以具有至少300%的断裂伸长率。所述第二弹性体可以具有至少800%的断裂伸长率。所述第一弹性体可以包含聚二甲基硅氧烷、聚氨酯和热塑性弹性体中的至少一种。所述第二弹性体可以包含聚氨酯。所述第二弹性体可以包含热塑性聚氨酯。所述第二弹性体可以包含丁腈橡胶。所述第一弹性体可以是光学透明的。所述装置可以进一步包括用于所述第一弹性体的刚性的、光学透明的支撑结构。所述刚性的、光学透明支撑结构可以由石英、丙烯酸树脂(acrylic)、玻璃、聚苯乙烯、环氧树脂、聚碳酸酯、聚氨酯、聚对苯二甲酸乙二醇酯(pet)、乙二醇改性的聚对苯二甲酸乙二醇酯(pet-g)和聚氯乙烯(pvc)中的至少一种形成。所述装置可以进一步包括在所述第一弹性体和所述第二弹性体之间的均匀不透明层。所述装置可以进一步包括被定位以照射所述第一弹性体的照明系统和被配置成捕捉通过所述第一弹性体的均匀不透明层的图像的成像系统。所述装置可以进一步包括用于所述第一弹性体的柔性支撑结构。所述装置可以进一步包括机器人手指,其中所述第一弹性体和所述第二弹性体形成用于所述机器人手指的接触垫。所述装置可以进一步包括穿过开口的杆,其中所述第一弹性体和所述第二弹性体被成形为用于在该开口中的所述杆的环形流体密封件。所述膜可以包含低摩擦涂层。所述膜可以包含不透明层。所述装置可以进一步包括在所述第一弹性体的基材和包括所述第二弹性体膜之间的粘合层。所述第一弹性体的第一硬度可以不超过5的肖氏a硬度,其中所述第一弹性体的基材在所述膜和支撑结构之间具有至少1mm的厚度。所述膜可以具有不超过500μm的厚度,其中所述第二弹性体具有至少50的肖氏a硬度、至少10兆帕的抗拉强度、至少300%的断裂伸长率和不超过1.5的与钢哑光表面的动摩擦系数。所述第一弹性体可以具有不超过5的第一肖氏a硬度,其中所述第二弹性体具有为至少70的第二肖氏a硬度、至少850%的断裂伸长率和至少30兆帕的抗拉强度。所述膜可以具有在10μm和500μm之间的厚度,包括端值。所述膜可以具有在30μm和200μm之间的厚度,包括端值。所述膜可以具有在50μm和100μm之间的厚度,包括端值。所述第二弹性体的第二硬度可以是所述第一弹性体的第一肖氏a硬度至少10倍的第二肖氏a硬度。所述膜的第二表面可以提供具有比单独的第一弹性体或单独的第二弹性体的耐磨性更大的复合耐磨性的接触表面。所述复合耐磨性可以比所述单独的第一弹性体或所述单独的第二弹性体大至少50%。所述复合耐磨性可以比所述单独的第一弹性体或所述单独的第二弹性体大至少100%。所述复合耐磨性可以比所述单独的第一弹性体或所述单独的第二弹性体大至少200%。第一弹性体和第二弹性体的复合耐磨性以及耐磨性可以作为在20g负载下紧靠具有以1900英尺/分钟运行的200粒度砂纸的带式砂光机时的断裂时间进行测量。所述第一弹性体和所述第二弹性体的耐磨性以及复合耐磨性可以根据标准化磨损测试进行测量。
8、在一个方面中,在本文中公开的方法可以包括:提供支撑结构;将基材设置在所述支撑结构上,所述基材包含具有第一硬度的第一弹性体;和在所述第一弹性体的基材的第一表面上设置第二弹性体膜,所述第二弹性体具有比所述第一弹性体的第一硬度更大的第二硬度,其中所述第二弹性体在与所述第一弹性体的基材的第一表面背对的第二表面上具有低摩擦系数,并且其中所述第二弹性体具有高强度和高弹性。
9、附图简述
10、在以下附图中示出了在本文中所描述的装置、系统和方法的实施方案。所述附图不必按比例绘制,而是将重点放在说明本公开内容的原理上。
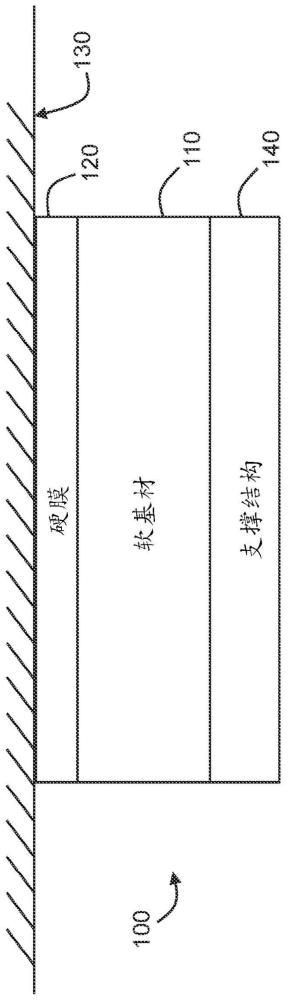
11、图1显示了耐磨复合结构的横截面。
12、图2示出了复合结构的耐磨性。
13、图3显示了包括耐磨复合结构的系统的横截面。
14、图4示出了耐磨接触垫的操作原理。
15、图5示出了耐磨接触垫的操作原理。
16、图6示出了耐磨接触垫的操作原理。
17、图7示出了耐磨接触垫的操作原理。
18、图8示出了耐磨接触垫的操作原理。
19、图9示出了作为覆盖膜的经验弹性极限的函数的各种复合材料的磨损速率。
20、详细说明
21、在本文中提到的所有文件均通过引用整体并入。对单数个项目的引用应理解为包括复数个项目,反之亦然,除非另有明确说明或从上下文中可以清楚地看出。语法连词旨在表达连接的从句、句子、单词等的任何和所有析取和连接组合,除非上下文中另有说明或从上下文中可以清楚地看出。因此,术语“或”一词通常应理解为表示“和/或”等。
22、在本文中对值的范围的叙述并不旨在进行限制,而是单独指落在该范围内的任何和所有值,除非在本文中另有说明。在此范围内的每个单独值都被并入到说明书中,如同其在本文中单独叙述一样。还应理解的是,在本文中提供了材料特性的各种数值范围和值,并将其所描述为适合于耐磨复合材料。这些值源自所报道的材料特性、实验结果和/或基于任何前述和观察到的耐磨特性的估计的组合,并且旨在一般性地所描述其中复合结构与其单独的组成成分相比表现出更优越的耐磨性的值或值的范围。
23、当伴随数值时,词语“大约”、“近似”等应被解释为如本领域普通技术人员将理解地指示偏差,以为了预期目的而令人满意地运行。值的范围和/或数值在本文中仅作为示例提供,并不对所描述的实施方案的范围构成限制。在本文中提供的任何和所有示例或示例性语言(“例如”、“如”等)的使用仅旨在更好地阐明实施方案,并不对实施方案或权利要求书的范围构成限制。在本说明书中没有语言应被解释为指示任何未要求保护的元素对于实施方案的实践是必要的。
24、在以下所描述中,术语如“第一”、“第二”、“顶部”、“底部”、“上”、“下”等均为方便用语,并且不应被解释为限制性术语,除非具体相反地说明。
25、在本文中所描述的装置、系统和方法可以包括或可以用于光学传感器中,如在2014年3月8日提交的美国专利申请no.14/201,835、2015年9月8日授权的美国专利no.9,127,938和2013年4月2日授权的美国专利no.8,411,140中所描述的任何逆照传感器。上述专利的全部内容通过引用特此并入本文中。在某些方面中,在本文中所描述的装置、系统和方法可以用于其中作为机器人工具的逆照传感接触垫,或在设计用于在磨损表面上重复使用的逆照传感器中使用。然而,在本文中所描述的装置、系统和方法也可以或替代地被包括在其它系统中,或以其它方式与其它系统一起使用,如可以有利地包括柔韧的、耐磨的接触表面的任何系统。
26、图1显示了耐磨复合结构的横截面。通常,结构100可以包括由软材料(如软弹性体)形成的基材110和由坚固的、硬的材料(如硬弹性锉)形成的膜120。所述膜120可以例如是比基材110更硬的弹性体,其至少部分地覆盖所述基材110。例如,所述膜120可以覆盖所述基材110的整个顶部表面,从而提供用于使用所述耐磨复合结构100的工作表面。所述膜120优选具有相对低的摩擦系数(cof),以便于以抵抗磨损的方式滑动穿过接触表面130。这种两层复合结构可以有利地形成柔韧的、耐磨的接触垫,该接触垫可以符合目标表面,同时抵抗由于与在目标表面上的磨损材料接触而造成的损伤。也应将理解的是,虽然弹性体为所述基材110和所述膜120提供了一系列具有合适机械性质的材料,但也可以使用或替代地使用其它材料。例如,所述基材110可以由流体形成,该流体被包含在由硬弹性体膜120或任何其它适当坚固和弹性材料的薄膜全部或部分界定的体积内。
27、通常,所述膜120和基材110可以通过支撑结构140来支撑,该支撑结构140为复合结构100提供结构性、机械性支撑,使得例如所述复合结构100可以被放置或以其它方式操作以用于预期用途。所述支撑结构140可以例如包括用于光学传感应用的刚性光学透明板,或机器人元件(如机器人手指或其它用于使用所述复合结构100对目标物体(例如作为抓握表面)进行机器人操纵的机器人执行器)中。更通常地,所述支撑结构140可以包含任何刚性结构、半刚性结构、柔性结构或这些适合于预期应用的组合。例如,在逆照传感器或类似的光学传感装置或系统中,所述支撑结构140可以包含10-20mm厚的光学透明聚对苯二甲酸乙二醇酯或聚碳酸酯,其虽然通常是刚性的,但也可以稍微弯曲,例如以符合目标表面。
28、图2示出了作为在如图1中所示的复合结构的膜厚度的函数的耐磨性。
29、通常,x轴显示放置在软基材(如以上所描述的膜)或任何其它合适的外表面材料上的硬膜的厚度。这种材料覆盖软的下伏基材,如软弹性体。膜厚度可以使用用于在软基材上的硬膜的深度的任何合适的尺寸进行测量。例如,膜厚度可以以微米、厘米、英寸等为单位进行测量。
30、y轴显示耐磨性。这可以使用随着耐磨性的增加而增加的任何合适的度量或数字(figure)进行测量。例如,耐磨性可以以时间单位进行测量,例如,在标准化的连续磨损条件下发生所述软弹性体的破裂或暴露的时间。例如,这可以是将薄膜暴露于在带式砂光机上以预定速度在预定法向力下移动的研磨表面(如具有预定砂砾的砂纸)上。在另一个方面中,耐磨性可以作为膜的可测量性质的降低值(如膜厚度的降低值,或薄膜材料的重量或体积的损失值)的倒数进行测量,例如在标准化负载条件下。更通常地,本领域中已知的并且适合于比较具有不同厚度的膜的复合材料的磨损速率的任何客观磨损测试方法都可以用于测量在本文中所设想的耐磨性。
31、如曲线200所示,耐磨性可以作为设置在所述软基材上的硬膜的厚度的函数而变化。应当理解的是,所述曲线200的形状不是精确的并且不代表任何特定材料或材料的组合,并且曲线的形状和幅度将根据特定的材料选择和物理排列而变化。相反,所述曲线200旨在总体上说明本发明人在测试在本文中所述的各种材料组合时发现的在膜厚度和耐磨性之间的意料之外的关系。特别地,应当指出的是,对于相对厚的外膜(在图2中的最右侧),复合材料的耐磨性接近所述厚膜(作为块体(bulk)材料)的耐磨特性。相反地,当膜的深度接近零时,所述复合材料的耐磨性接近下伏软弹性体的耐磨特性。在这些极端之间,似乎有一系列膜厚度,对于该一系列膜厚度,在软弹性体基材上的硬弹性体膜共同显示出令人惊讶的耐磨性提高,该耐磨性超过任一材料单独的整体性质,并且在某些情况下显著地超过这种耐磨性。对于某些材料选择,在客观测量的耐磨性(如破裂时间或材料损失值的倒数)中的改善可以超出组成材料的耐磨性的50%、100%、200%或更多。对于常见的市售弹性体和其它材料(如在本文中所描述的那些)的多种组合,这提供了复合结构的有用工作范围210,其可以有利地以优良的光学性能和改善的耐磨性而被使用于逆照传感、触觉传感、机器人处理等。高耐磨性也可以有利地用于制造用于其它应用的装置,例如垫圈、流体密封件等。还应当理解的是,对于不同的预期用途,有用的工作范围可以是不同的。例如,第二工作范围220可以适合于高压、高循环的机械垫圈。
32、这里提供了关于这些复合材料的一些附加的初步注释,下面提供了某些实施方案的详细实验数据。
33、第一,如上指出的,所述曲线200的形状旨在说明总体关系而不是用于材料的任何特定组合的实验数据。因此,例如虽然说明性曲线200从两侧单调增加到峰值,但在某些条件下和/或对于某些材料,可以存在所述关系的极性的不连续性或变化。更通常地,在复合材料中所使用的材料的性质之间似乎存在复杂的相互关系,并且有效变量至少包括膜的厚度、强度、弹性、硬度和摩擦系数以及基材的硬度。尽管并非这些参数的所有组合都已被表征,但在已经测试的材料的组合之间的总体关系看起来是一致的。例如,尽管在图2中未示出,但在所述膜的外部上的较低摩擦系数看起来增加了耐磨性,并且所述膜的较高强度和弹性看起来增加了耐磨性。
34、第二,许多耐磨性测试在本领域中是已知的,并且可以被用来比较如在本文中所描述的各种材料和复合结构的耐磨性。例如,american society for testing andmaterials(astm)的磨损测试astm d-1044(也称为taber磨损),是用于确定塑料耐磨性的标准测试。虽然这为比较磨损速率提供了有用的、客观的基准,但也可以或替代地采用其它标准化或定制的测试方案,只要它们为比较不同材料和/或复合材料之间的磨损速率提供一致的基础。实验数据的定量结果将被预期根据所选的测试技术而变化,然而总体关系被预期保持相同,并被预期一致地证明复合材料的耐磨性比其任何单独的组成材料都有显著提高。
35、通常,所述膜可以有利地由坚固的、硬的和有弹性的材料形成。弹性(例如,以弹性极限(%)、伸长应力等来测量)表征膜弯曲和拉伸以符合粗糙接触表面并减少或减轻高局部应力点的能力。弹性的各种客观测量被提供在下面的表2中。同时,高强度(例如,以撕裂强度(例如kn/m,根据astm d624类型c测量)、抗拉强度(例如mpa,根据astm d412测量)、断裂伸长率(%)或任何其它客观测量来测量)允许膜经历这些变形,而不撕裂或以其它方式断裂,特别是在需要薄膜的情况下,例如,使得所述复合结构可以在变形的同时保持其结构完整性。强度的各种客观测量被提供在下面的表1中。
36、应当理解的是,上述材料性质中的一些(如断裂伸长率)可以被认为是强度(例如,通过指定断裂点)或弹性(例如,通过指定变形程度)的度量。然而,特定度量标准是否描述强度或弹性通常比所测量的性质是否对复合材料结构的耐磨性有积极贡献(更具体地说,通过允许复合材料膜容易且牢固地符合接触表面)较不重要。因此,虽然各种度量标准在本文中被分类为测量强度或弹性,但这些应被理解为方便的类别而不是严格的定义精度。尽管有前面所述情况,基于报告的数据、实验数据和观察,看起来膜的最小有用撕裂强度为约20kn/m,或约20-30kn/m,其中具有40kn/m及以上撕裂强度的膜提供了甚至更好的耐磨性质。
37、还应当指出的是,强度和弹性的不同客观测量通常(尽管不严格)彼此相关,使得强度的不同客观测量可以用作用于识别适合于耐磨复合材料的高强度材料的代理,并且弹性的不同客观测量可以用作用于识别高弹性材料的代理。此外,虽然强度、硬度和弹性的最佳组合可以根据其它材料性质(如底层弹性体的柔软度、粗糙、磨损接触表面的性质和其它因素)而变化,但看起来对于具有大约相同硬度的不同弹性体膜来说,强度和弹性通常与改善的抗磨损性能呈正相关。
38、这些原理可以在某些应用中被利用以发挥特别的优势。例如,逆照传感器可以使用设置在软弹性体上的坚固的薄膜。该膜优选地是足够薄的以允许传感器与接触表面的优良一致性,其厚度为30μm至80μm,或更通常为约20μm至约200μm,或还更通常约5μm至约500μm,为基于接触的成像应用提供优良的物理浮雕和光学分辨率。本技术人已经观察到,该厚度范围也可以产生在本文中所描述的希望的耐磨性质。通常,在这些值的范围内,较厚的膜提供较高的耐磨性和较低的光学分辨率。因此,在一个方面,在本文中公开了一种耐磨逆照传感器,其具有设置在软弹性体上的5-500μm、20-200μm、或30-80μm或在其中包含的任何其它范围的薄膜层。还应当指出的是,如下所述,传感器也可包括光学反射层,例如,在硬弹性体膜的软弹性体侧上,该光学反射层可与硬膜结合,在软弹性体上方提供约50μm至约100μm的层——在上述范围内的厚度可用于硬膜对接触表面的高分辨率成像。在另一个方面中,所述薄膜层可以由适合于逆照传感的光学反射层形成,从而省去了对设置在其上的单独的不透明层的需要。由在本文中所描述的复合材料形成的光学传感器也可以包括粘合剂、光学涂层、低摩擦涂层、刚性基材等,其可以被包括作为附加层和/或被并入到薄膜层(和/或软弹性体)中。根据这些原理的耐磨逆照传感器的实施方案现在更详细地进行描述。
39、图3显示了包括耐磨复合结构的系统的横截面。结构300可以是具有耐磨接触表面的逆照传感器,其可以被集成到例如在美国专利no.10965854(通过引用将其全部并入本文)中所描述的任何装置和系统中。在这种背景下,所述结构300也可以包括用于捕获图像和进行目标表面的三维成像的照明和成像系统302。更通常地,在本文中所描述的复合结构可以有利地用于其中可变形的、耐磨的接触表面可以是有用的任何背景情况中,如抓手、末端执行器、或其它机械处理装置等,它们可以用于机器人操作物品。
40、对于具有逆照传感器的机器人手指,所述复合结构通常可以包含在图3中示出的层。例如,所述结构300可以包含由刚性、光学透明材料(如玻璃或透明聚甲基丙烯酸甲酯或聚碳酸酯)形成的支撑件304。该支撑件304也可以或替代地包含半刚性材料、柔性材料或它们的组合,这取决于所述结构300的预期用途。所述结构300也可以包含基材306,如设置在所述支撑件304上的柔软的、光学透明的弹性体等的层。可以提供粘合层308以将所述基材306的软弹性体粘附到一个或多个附加表面层上。例如,不透明层310,其可以含有散射和/或反射颜料,或被涂覆或以其它方式进行处理以提供用于成像的不透明表面,其可以通过粘合层308耦合到柔软透明弹性体的基材306,并且可以形成用于耐磨性的硬弹性层。摩擦控制层312可以被设置在不透明层312上,以进一步管理复合材料的抗磨损性质。在另一个方面中,所述摩擦控制层312可以包含设置在不透明层310上方的硬的、弹性、抗磨损层,从而产生具有所期望的光学和机械性质的复合材料。在一个方面中,所述摩擦控制层312可以包含低摩擦层和硬弹性层,其可以由单一、整体材料或多层材料形成。在另一个方面,所述摩擦控制层312可以由单一材料或复合材料形成,该单一材料或复合材料组合了所述不透明层310的光学性质、所述摩擦控制层312的低摩擦性质和所述摩擦控制层312的硬弹性性质,从而提供结合到所述基材306上或以其它方式设置在所述基材306上的单一材料层。
41、将理解的是,虽然图3示出了特定的层,但所述结构300可以更通常地包含通过用较硬的弹性体(或其它材料)膜覆盖软弹性体(或者其它材料)而形成的软的、耐磨的接触垫,其中所述较硬的弹性体具有相对低的摩擦系数(cof)——如参照图1所示的结构100。当由合适的弹性体形成时,此类复合材料有利地比完全由组成弹性体材料中的任一种组成的垫更耐磨,并且取决于材料,其可以具有高至少50%的耐磨性、高至少100%的耐磨性、高至少200%的耐磨性,或更高,如使用任何合适的磨损测试或耐磨性标准进行客观地测量。使用一系列合适的弹性体,此类复合材料可以例如进行配置以用作逆照传感器,例如具有足够柔软以变形至所接触的目标表面的光学透明或基本光学透明的弹性体(例如,在用于成像的波长范围内)和设置在其中的更硬的不透明层,并且可以穿过透明弹性体被照射并成像以捕获用于三维表面重建的数据。
42、所述摩擦控制层312可以包含任何合适低摩擦层或与目标表面314紧邻的复合材料(例如,在所述目标表面和所述结构300的其它层之间),以允许滑动并缓解或减轻集中接触力的点。在一个方面中,可以通过喷涂在所述摩擦控制层312上形成合适的低摩擦或低静摩擦表面。例如,这可以包括将(未固化的)抗磨损涂料(例如,具有约10%重量的丙烯酸酯单体的聚氨酯)和约2%重量的具有直径约为10μm的甲基倍半硅氧烷(silsesquioxane)微球的稀释溶液喷涂到抗磨损涂层上。喷涂涂层可以以在干燥后不平整的方式施用,留下不平坦的、哑光表面,其轮廓部分地由微球形成,以减轻大的、均匀的、高摩擦的接触表面。涂层可以被uv固化以将在所述摩擦控制层312中的粘合剂与在所述不透明层310中的粘合剂进行交联,从而稳定在复合结构的表面上的微球。下伏的不透明层310,或在所述不透明层310和所述摩擦控制层312之间的另一个硬弹性层也可以包含所述微球,例如,以相似的比例,以便在所述复合结构300被磨损时,在所述复合结构的接触表面中保持减轻摩擦微球的浓度。更通常地,各种减少摩擦和减少静摩擦的技术在本领域中是已知的,并且可以进行调节以为在本文中所描述的任何复合结构提供低摩擦或低静摩擦接触表面。
43、通常,接触垫可以由在本文中所描述的任何复合结构形成,其可以有利地显示出比形成复合材料的任何散装材料优越的耐磨性。例如,所述硬膜可以由具有肖氏a硬度为70的热塑性聚氨酯(tpu)形成,其在这种背景下是相对硬的。如果用预定的接触力将这种材料的实心板压靠在具有200砂砾带的带式砂光机上并运行60秒,则可测量的数量的tpu将被磨损掉。然而,如果将75μm厚的相同tpu的膜涂覆到一定体积的软弹性体上,例如具有5的肖氏a硬度的软弹性体(在这种背景下相对柔软),则在相同的接触条件下,复合垫可以显示出几乎完全没有磨损。更通常地说,当由软弹性体支撑时,tpu的薄膜将表现出比单独的相同tpu的厚板更大的耐磨性。图4-8说明了这种耐磨接触垫的工作原理。
44、图4显示了在底部上具有尖锐突起的粗糙物体ro1。该物体被压靠在硬弹性体垫he1上,该硬弹性体垫he1支撑在刚性块rb1上。每个突起在其形成接触的小片弹性体上施加局部力。由于每个突起的接触面积小,因此局部压力高。如果物体现在切向移动,它将在接触点处产生大的局部应力,当突起在垫上刮擦时,这可能导致局部损坏。
45、图5显示了压靠在由刚性块rb2支撑的软弹性体垫se2上的粗糙物体ro2。由于这个垫是由柔软的材料制成的,它很容易变形以适应物体的粗糙纹理。接触压力分布在大的表面积上,而不是集中在多个点上,这减少了当物体切向移动时产生高局部应力的趋势。然而,软弹性体通常具有高cofs,这将在切向运动期间增加切向力。此外,软弹性体通常机械性质较弱,因此很容易损坏,当在这些条件下滑动时会导致明显的磨损或损坏。
46、因此,由硬弹性体或软弹性体制成的垫都会因粗糙物体在其表面摩擦穿过而经受损坏,但原因不同。硬弹性体的优点是坚固且具有低cof,但缺点是在稀疏的接触点处具有高局部应力。软弹性体具有将力分布在大面积上的优点,从而防止高局部应力的点,但具有是较弱和具有高摩擦力的缺点。
47、图6显示了与粗糙表面接触的耐磨接触垫。通常,硬弹性体的膜可以覆盖软弹性体。将粗糙物体ro3压靠在复合垫上,该复合垫由涂覆在由刚性块rb3支撑的软弹性体基材se3上的硬弹性体膜hef3制成。如果该膜是薄的且是弹性的,它将容易弯曲和拉伸,以遵循粗糙物体的轮廓,并且从而允许力被分布在大面积上。同时,该膜将具有与硬弹性体相关的强度和低cof,并且因此将抵抗磨损。
48、图7示出了具有较厚的硬弹性体膜的接触垫。通常,粗糙物体ro4可以与硬弹性体膜hef4接触,该硬弹性体膜hef4被涂覆在软弹性体基底se4上,软弹性体基底se4支撑在刚性块rb4上。该膜hef4比在先前实例中的相应膜hef3厚得多。由于厚度过大,所述膜没有足够的柔性和可拉伸性来遵循物体粗糙表面的轮廓。这导致一组稀疏的具有高局部应力的接触点。因此,过厚的硬弹性体膜将增加与尖锐或粗糙的接触特征强制接合的趋势,并损坏接触垫。这也对应于在图2中所示的耐磨性曲线的右侧尾部,在那里,复合结构的耐磨性随着膜厚度的增加而接近膜的耐磨性。
49、在另一个方面中,使用非常硬的弹性体的薄膜将不会提供最佳性能。图8显示了与非常硬的弹性体膜vhef5接触的粗糙物体ro5,该弹性体膜vhef5被涂覆在软弹性体se5上,该软弹性体se5被安装在刚性块rb5上。尽管这种薄膜vhef5正好与图6中的薄膜hef3一样薄,但它是过于僵硬的使得无法遵循粗糙物体的轮廓,导致一组稀疏的具有高局部应力的接触点,这可以损坏接触垫。因此,当非常高的硬度意味着低弹性,或者更通常地,意味着不能符合目标表面时,这可能干扰复合结构的耐磨性。
50、在上文中,术语如“强度”或“高强度”被用于所描述各种弹性体。应当理解的是,有多种可以具体说明材料的强度的方式,包括抗拉强度和撕裂强度。在其中粗糙物体在弹性垫上移动的情况下,机械强度的多个方面可以是重要的。虽然这些不同的强度测量通常是相关的,但它们并不是普遍如此,并且在一些情况下,可能重要的是确保多个不同的强度度量共同足以获得优良的耐磨性。因此,当在本文中使用如高强度、更强的等术语时,应当理解为是指具体的客观强度度量,如在本文中所描述的任何一种,其中该材料性质足以确保优良的耐磨性,以及允许复合结构充当耐磨接触垫的强度度量的任何组合。
51、此外,尽管使用了通用术语“摩擦”,但应当理解的是,摩擦可以是静态的或动态的,并且摩擦相互作用是非线性的,其方式不通过摩擦系数(cofs)进行捕获。此外,摩擦是彼此接触的两种特定材料的特征,并且对一种材料(如玻璃)的摩擦力可以不同于对另一种材料(如钢)的摩擦力。同时,摩擦特征倾向于是相关的,因此,谈论不同的弹性体具有更高或更低的cofs是有意义的,例如,相对于复合结构所针对的目标表面的特定类型。
52、现在讨论已经被证明影响该复合结构耐磨性的参数。
53、由于支撑硬膜的软基材本身不与物体直接接触,因此软基材的cof对完整的复合结构没有影响。然而,例如在合适的shore硬度标尺上测量的硬度是优良耐磨性的相关度量标准。对于基材,已经测试了各种软弹性体系列,包括硅橡胶(pdms)、聚氨酯和热塑性弹性体如苯乙烯嵌段共聚物。只要它们是适当柔软的,它们中的任何一个看起来都能充分地充当用于接触垫的基材。例如,有用的耐磨复合接触垫已经使用具有低于10的肖氏a硬度的软弹性体进行制造和测试,尽管较硬的弹性体可以用在各种情况中,例如其中在耐磨性的适度降低是可接受的情况中,或其中在使用较硬和/或较低摩擦的膜的情况中。在shore00标尺上,用于耐磨接触垫的有用的软弹性体看起来在20和65之间的范围。实验数据并未暗示该硬度的任何下限,正因为如此,其它超软凝胶、流体如非粘性流体、气体等也可以或替代地用作用于耐磨复合材料的基材。
54、对于覆盖膜,相关参数看起来包括厚度、硬度(例如,在shore硬度标尺上测量)、强度(例如,以撕裂强度、抗拉强度或类似的客观测量值度量)、弹性(例如,以屈服伸长率、弹性极限、伸长率应力等进行测量)和摩擦系数(例如,动态cof或静态cof)。对于硬度而言,使用具有在约肖氏a 50和肖氏a 90之间的硬度的弹性体,复合接触垫已经显示出改善的耐磨性(相对于组成材料)。对于给定的硬度,不同的弹性体将具有不同的强度、cof和弹性的组合,从而产生不同的耐磨特性。对于高耐磨性,其看起来对于使硬弹性体变强和使其具有低cof通常是有用的。
55、外部硬膜的摩擦系数可以显著影响耐磨性。对于许多材料,动摩擦系数针对哑光不锈钢(更具体地,以60rpm旋转的具有精细砂磨表面的4.5英寸不锈钢滚筒)进行测量。一根48英寸长、具有正方形横截面的中空丙烯酸树脂杆(acrylic rod)固定着测试样品。每个样品用聚氨酯握把胶带连接到所述杆中间的一个点上。将安装好的样品与旋转滚筒接触。来自杆的重力提供了法向力f1,测量为2.1牛顿。使用弹簧测力计来测量产生的摩擦力f2。动摩擦系数计算为f2/f1。值得注意的是,elastollan tpu膜和elkempdms膜都具有相同的硬度(肖氏a 70),但pdms的摩擦系数比tpu的摩擦系数的300%以上。在其它条件相同的情况下,这表明tpu将产生具有优异耐磨性的复合结构,这一结果已得到实验证实。
56、
57、总之,用于软基底的弹性体的选择看起来并不关键,只要它足够柔软。用于硬膜的弹性体的选择看起来很关键,因为所得复合材料的耐磨性取决于硬度、强度、弹性和摩擦系数的组合。至少有两种具有优良性能的弹性体已被实验证明在复合垫中提供优良的耐磨性:聚氨酯和丁腈橡胶。通常,应当理解的是,术语“软”和“更软”以及互补术语“硬”和“更硬”用于描述在基材中的基础弹性体和覆盖膜的相对硬度(或软度),并且更具体地,表明基础弹性体比覆盖膜相对更软和更柔韧。软度和硬度的一些通常范围在本文中通过使用shore标尺的客观测量进行提供——然而,也可以使用其它材料的软度和硬度,只要复合结构通常具有足够软的基材以产生和减轻与粗糙表面的稀疏接触点,以及足够硬的、薄的、低摩擦、弹性的表面以分布表面接触和产生的接触力的方式符合接触表面。因此,虽然提供了特定的数值范围,但也可以组合使用其它范围和/或其它弹性体等以提供耐磨复合结构,并且旨在落入本公开的范围内,除非明确指出相反情况。
58、受这些一般约束,看起来聚氨酯和腈尤其为耐磨复合材料提供了合适的性质。聚氨酯通常具有高强度、低摩擦系数和高弹性,并且看起来优良地充当了覆盖膜。例如,具有在40和90之间的肖氏a硬度的聚氨酯弹性体典型地具有超过400%的断裂伸长率。
59、丁腈橡胶在这些维度上也得分不错。大多数其它弹性体系列看起来达不到这些客观度量标准,并且当在复合结构中进行测试时,在测试条件下提供了较不令人满意的耐磨性。例如,pdms通常比聚氨酯和腈更弱,并且具有比聚氨酯或腈更高的cof。因此,pdms在至少两个维度上比这两种优选的材料更差,并且作为用于软弹性体的耐磨涂层表现更差。乳胶膜(如用于一次性乳胶手套中)具有高强度和高弹性,但也具有高cofs。柔性pvc膜(如用于一次性乙烯基手套中)具有低cofs,但具有低强度和低弹性。热塑性弹性体(如sebs或seeps苯乙烯嵌段共聚物)具有高强度和高弹性,但也具有高cofs。
60、现在提供了许多工作实例。许多基材由覆盖有各种硬弹性体膜的软pdms弹性体(smooth-on eco-flex gel)构建。ecoflex凝胶是非常粘的,因此膜可以直接粘附在该基材上,而不需要任何额外的粘合剂。具有各种性质的膜是从商业来源获得的,如下所示。pdms膜使用elkem lsr silbione 4370、1份a、1份b和4份六甲基二硅氧烷,并在玻璃片上作为涂层形成。在干燥和固化之后,所述膜约为75μm厚。为了产生tpe膜,将seeps嵌段共聚物(kuraray septon 4099)与矿物油以约1:1的比例进行混合,并用甲苯以约1:4的比例进行稀释。将其倒在玻璃片材上以在干燥后形成约75μm厚的肖氏a 70膜。为了产生elastollantpu膜,将elastollan 1170a10(来自basf)溶解在四氢呋喃中并倒在玻璃片材上,在干燥后形成约80μm厚的膜。这些基材-膜复合垫的耐磨性通过将它们以20g的重量压靠在带式砂光机上进行测试,该带式砂光机以1900英尺/分钟(fpm)运行200粒度的砂带。当薄膜在这些条件下磨损时,它最终达到灾难性的失效点,随着砂纸破损穿透到下伏的软弹性体而破裂。失效的时间为如下:
61、
62、基于前述测量和各种相应材料的所报告的性质,所述膜在其具有高强度、高弹性和低摩擦的情况下表现较好。在一个方面中,聚氨酯,并且尤其是具有高硬度、高断裂伸长率和高抗拉强度的热塑性聚氨酯,提供了用于在本文中所描述的耐磨复合材料的合适材料。
63、使用如图3所示的化合物结构进行第二组实验。测试了聚氨酯、聚氨酯和丙烯酸酯混合物以及丁腈橡胶的样品作为耐磨损表皮。对于该测试,软弹性体包括热塑性弹性体septon 4033,一种由kuraray制造并通过添加剂如矿物油和regalrez 1094(由eastmanchemical制造的增粘剂)增塑的seeps聚苯乙烯嵌段共聚物。增塑剂含量为软凝胶的80重量%,其中40%来自油,40%来自增粘剂。软凝胶的硬度被测量为shore 00=33。厚度为3mm。粘合层和反射层均用basf elastollan聚氨酯1170a10配制,组合厚度为15μm。反射颜料是由silberline制造的sparkle silver ultra 7908。
64、测试的聚氨酯的性质总结在下面的表1和表2中。通常,american society fortesting and materials(astm)磨损测试astm d-1044(也称为taber磨损),是一种用于确定塑料耐磨性的标准测试。虽然各种标准化磨损测试在本领域中是已知的,但这为在本文中所描述的各种弹性体材料的性质提供了有用的基准。
65、表1.basf elastollan性质(basf数据)
66、
67、*磨损测试astm d-1044
68、表2.basf elastollan性质(basf数据)
69、
70、丙烯酸酯可用于改变聚氨酯的硬度和弹性。丙烯酸酯可以特别有用,因为它们与聚氨酯分子相容,并且已经显示能够在聚合时形成互穿的3-d网络。这种3-d网络增加了材料的强度和刚度,并且可以通过跨这些层的化学交联材料来促进相邻层的结合。3-d交联网络通过丙烯酸酯基团的聚合而发生,这可以通过将uv引发剂并入到组合物中并在涂布或浇铸后进行uv照射而容易地实现。丙烯酸酯在宽范围的包括化学结构、分子量和每分子丙烯酸酯官能团数量的化学组成中是可获得的。互穿3-d网络的强度取决于网络的交联密度,其可以通过每分子丙烯酸酯基团的官能度或数量、丙烯酸酯基团之间的分子量以及在配方中使用的丙烯酸酯的质量浓度来控制。双官能聚氨酯丙烯酸酯(其是在每个分子末端具有丙烯酸酯基团的线性聚氨酯低聚物)可以特别有效。这些材料将与聚氨酯形成均匀的网络。因此,在一个方面中,聚氨酯可以通过添加一种或多种丙烯酸酯进行改性,以改善硬度和弹性,并使用聚氨酯/丙烯酸酯混合物来改善由此得到的复合结构的耐磨性质。
71、下表3总结了发现有利于测试的sartomer丙烯酸酯氨基甲酸酯低聚物的性质。注意的是,作为聚合的均匀材料,它具有140%的伸长率,这显著小于与它共混的聚氨酯的600%-800%的伸长率。此外,抗拉强度与聚氨酯的抗拉强度相似。因此,丙烯酸酯与聚氨酯的共混可用于增加刚度,并且其聚合可用于粘合含有丙烯酸酯的相邻层。
72、表3.sartomer:脂肪族氨基甲酸酯丙烯酸酯低聚物
73、
74、将待测试的聚氨酯和聚氨酯丙烯酸酯混合物的样品用溶剂thf(四氢呋喃)涂覆在玻璃板上。将涂层从玻璃上剥离,切割成形并放置在待测试的复合结构的反射层上。所述涂层通过简单的静摩擦或两个光滑样品在接触时粘附的趋势被固定在位置上。丁腈橡胶样品被手动固定在位置上以进行测试。
75、使用在本文中讨论的材料形成的接触垫的耐磨性已通过手动测试(通过用带式砂光机和120粒度砂纸以40英寸/秒的速度砂磨复合垫的表面)进行评估。每个传感器的表面都是圆顶状的,其具有约3英寸的曲率半径。用手将圆顶状传感器表面固定靠在移动的带上,施加轻到中等的压力,该压力足以使直径约3/8英寸的圆形区域接触该移动的砂纸带。
76、每个样品的弹性也通过在这里被称为经验弹性极限的简单测试进行评估。对于该测试,将该膜的条带切成1cm宽,并沿着卷尺拉伸,以记录条带对额外拉伸表现出显著阻力的长度。该伸长率被认为大约是聚合物链被拉伸出或展开至其极限的点,使得额外的伸长将涉及使分子键发生应变或断裂。注意的是,在这里测量的经验弹性极限是不同于断裂弹性(其是在材料屈服点的伸长百分比)或传统弹性极限(其是在材料塑性地或永久地变形并失去其弹性地恢复至其原始状态的能力的点)的测量值。这些测量值通常都是相关的,但断裂弹性显著大于经验弹性极限。
77、表4:砂带砂磨机器人传感器表皮
78、basf elastollan聚氨酯&sartomer聚氨酯丙烯酸酯
79、(流延膜通过静摩擦被粘附到2d传感器上并进行砂带砂磨)
80、(120砂纸3/8"直径砂磨垫,10分钟)
81、
82、#%测量伸长率直至非常坚固阻力
83、*在5分钟和31μm的厚度时破裂
84、**在9分钟和32μm的厚度时破裂。
85、注意如表4所示,与最佳性能相关的丙烯酸酯浓度目前被确定为0%丙烯酸酯,并且在该浓度时由砂磨引起的表皮损失率是显著低的——用以40英寸/秒移动的120粒度砂纸进行砂磨,约0-0.25μm/分钟砂磨。100μm厚的表皮,其对于机器人手指来说是合理的,将受到这种类型的砂磨持续多个小时。
86、从表4中还应注意,随着聚氨酯硬度的增加,耐磨性随着所述系列材料的变化而降低,这是违反直觉的。从上表1中注意到,固体聚氨酯的耐磨性随着elastollan等级从较软到较硬的变化而增加。这种具有增加硬度的改善的耐磨性对于固体弹性体是常见的。
87、还应注意,氨基甲酸酯丙烯酸酯的添加会降低耐磨性。丙烯酸酯是双官能的,也就是说,它每个分子有两个丙烯酸酯基团,并且当在uv引发剂的存在下暴露于uv辐射时,它将与自身交联,形成三维结构,这导致聚合或uv固化混合物的硬度增加和弹性降低。对于固体样品,将预期丙烯酸酯3d结构的存在会改善耐磨性,因为它增加了强度,正如更高硬度的elastollans具有更高的强度,但观察到的恰恰相反——耐磨性降低。
88、测试了两个丁腈橡胶样品,并且将数据总结在下表5中。
89、表5
90、来自实验室手套的丁腈橡胶
91、(将2d传感器插入到手套拇指中,牢固固定在位置上并用砂带砂磨)
92、(120砂纸,3/8"直径砂磨点,10分钟)
93、
94、*测试在5.5分钟时停止,样品因砂磨而产生折痕。
95、黑色丁腈橡胶:sysco高性质黑色丁腈手套,sysco corp.
96、蓝色丁腈橡胶:microflex supreno se、ansell healthcare products llc
97、对于该测试,所述丁腈橡胶样品是从实验室手套上切下的样品中获得的。可以将从手套拇指上取下的部分拉伸到圆顶状机器人手指传感器上,并将样品固定在位置上,同时对由此形成的表面进行砂磨测试。结果表明耐磨性是显著好的,并与对于许多聚氨酯/丙烯酸酯组合样品发现的耐磨性相似,尽管不如纯聚氨酯样品好。还要注意的是,测试的两个样品的厚度非常不同,但两个样品之间的耐磨性是相当的。如果这些相同的样品在圆顶硬丙烯酸酯形状(如凸透镜)上拉伸,并固定靠在砂带上,它们会在几秒钟内因撕裂而失效。
98、图9示出了各种复合材料的磨损速率v.s.弹性。更具体地,图9示出了作为对用作为覆盖膜的各种材料所测量的经验弹性极限的函数的磨损速率(以微米/分钟为单位)。将注意到的是,磨损性能(例如,磨损速率的降低)通常与经验弹性极限相关,其中具有最高经验弹性极限(例如,最大弹性)的膜提供的最佳耐磨性。
99、使用在本文所描述的复合结构制造的接触垫可用于各种应用。例如,这些接触垫可以用在机器人手指或其它操纵器上。然而,非刚性、耐磨的接触垫可以有效地被应用在许多其它环境中。例如,这种垫可以用于柔软或柔性物体与第二物体摩擦接触的任何情况中,特别地在其中没有液体润滑剂的情况下。例如,所述复合结构可以用作为用于可移动圆柱形轴的密封件。在这样的实施方案中,腔室可以被密封以防止来自腔室内部的气体与来自腔室外部的气体混合。所述轴可以通过弹性体环形密封件穿透腔室的壁,如果该弹性体环形密封件使用如在本文中所描述的复合结构制成,则该弹性体环形密封件可以允许所述轴绕其轴线旋转或沿其轴线平移,同时造成最小的磨损。更通常地,耐磨复合材料可形成为用于移动部件的垫圈或其它流体密封件,或任何其它其中耐磨性对于机械加载的界面是期望的垫圈、密封件、擦拭器或其它部件。
100、根据上述内容,在本文中描述了耐磨复合结构。通过更具体的示例,在一个方面,如本文所述的具有显着改进的耐磨特性的用于与目标表面进行耐磨接触的装置包括支撑结构;设置在所述支撑结构上的基材,所述基材具有:不超过10的第一肖氏a硬度和至少1mm的第一厚度;以及设置在基材上用于与目标表面接触的膜,所述膜具有:至少70的第二肖氏a硬度、不超过200μm的第二厚度、至少30兆帕的抗拉强度、至少650%的断裂伸长率和不超过1.5的与哑光钢的动摩擦系数。
101、有用改善的耐磨性质也可以或替代地通过复合装置获得,该复合装置包括:支撑结构;设置在所述支撑结构上的基材,所述基材具有:不超过10的第一肖氏a硬度和至少1mm的第一厚度;以及设置在所述基材上用于与目标表面接触的膜,该膜具有:至少50的第二肖氏a硬度、不超过500μm的第二厚度、至少10兆帕的抗拉强度、至少300%的断裂伸长率和不超过1.5的与哑光钢的动摩擦系数。
102、在上述和其它实施方案中,所述膜可以例如包括热塑性聚氨酯、热固性聚氨酯或丁腈橡胶。所述基材可以例如包括聚二甲基硅氧烷、聚氨酯和热塑性弹性体中的至少一种。还将理解的是,如在前面的描述中使用的短语“设置在…上”不要求在两个所提及的层之间的直接接触。也就是说,虽然所述膜被所描述为被设置在所述基材上,但这不要求在该两层之间的直接接触,或排除介入的功能层等。相反,在一个层或结构被所描述为设置在另一个层或结构上的情况下,这允许并任选地包括一个或多个介入层,该介入层包括功能层如光学膜、粘合层、图案化或纹理化表面等。
103、在本文中还公开了一种用于制造耐磨复合材料的方法。这通常可以包括提供支撑结构,如适合于预期应用的任何刚性或柔性支撑结构。这可以例如包括机器人手指、透镜或其它光学元件、用于逆照传感器的基材、垫圈、接触垫、擦拭器等等。该方法可以包括将基材设置在支撑结构上,该基材包含具有第一硬度的第一弹性体。该方法还可以包括在所述第一弹性体的基材的第一表面上设置第二弹性体膜,所述第二弹性体具有大于第一弹性体的第一硬度的第二硬度,其中所述第二弹性体在与所述第一弹性体的基材的第一表面背对的第二表面上具有低摩擦系数,并且其中所述第二弹性体具有高强度和高弹性。通常,所述支撑结构、弹性体、基材和膜可以是如在本文中所描述的任何那些。还应将理解的是,所述方法可包括任何合适的制造技术,如铸造、旋涂、混合、固化、粘合等,视所需的所得复合材料而定。适合于制造如在本文中所描述的复合、耐磨结构的所有这些技术都旨在落入该制造方法的范围内。
104、本文描述的实现方式的方法步骤旨在包括与所附权利要求的可专利性一致的、使得此类方法步骤被执行的任何合适的方法,除非明确提供不同的含义或者从上下文中清楚地看出。因此,例如执行x的步骤包括用于使另一方(例如远程用户、远程处理资源(例如,服务器或云计算机)或机器)执行x的步骤的任何合适的方法。类似地,执行步骤x、y和z可以包括指导或控制此类其他个体或资源的任何组合来执行步骤x、y和z以获得此类步骤的益处的任何方法。因此,本文描述的实施方式的方法步骤旨在包括使一个或多个其他主体或实体执行与所附权利要求的可专利性一致的步骤的任何合适的方法,除非明确地提供了不同的含义或者以其他方式从上下文清楚地表明了不同的含义。此类主体或实体不需要在任何其它主体或实体的指导或控制下,并且也不需要位于特定管辖区内。
105、应将理解的是,上述装置、系统和方法是通过实例而非限制的方式提出的。在没有相反的明确指示的情况下,所公开的步骤可以被修改、补充、省略和/或重新排序而不脱离本公开的范围。许多变化、添加、省略和其它修改将对本领域的普通技术人员来说是显而易见的。此外,在以上描述和附图中方法步骤的顺序或呈现并不旨在要求这种执行所列步骤的顺序,除非明确需要特定顺序或以其它方式从上下文中清楚地看出顺序。因此,虽然已经示出和描述了特定的实施方案,但是对于本领域的技术人员来说将显而易见的是,可以在其中进行形式和细节上的各种改变和修改,而不脱离本公开的精神和范围,并且旨在形成如所附权利要求所定义的本发明的部分,这些权利要求将通过法律在可允许的最广义中进行解释。
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!