一种防止后效推力对火箭飞行体产生干扰的控制方法与流程
本发明涉及固体火箭飞行控制,尤其是涉及一种防止后效推力对火箭飞行体产生干扰的控制方法。
背景技术:
1、以三级运载火箭为例,其飞行程序一般包括:一级点火、一级关机、一级分离、二级点火、二级关机、二级分离等时序。由于固体发动机的特性决定了发动机点火后不能随意关机,一般是燃料耗尽后关机,那么在一级分离后的一段时间内以及二级分离后的一段时间内,发动机可能会存在后效推力(后效推力:在发动机推力降低至某一阈值后,系统判定发动机已经关机,但在后续一段时间内仍然存在一定的推力)。火箭分离后,两部分分别为飞行体和分离体,分离体受到后效推力的作用,会产生沿飞行方向的加速度,有可能会与前方的飞行体发生追尾碰撞,对飞行体造成较大的姿态干扰,甚至结构损伤,导致飞行失利。因此需要设计相应的控制策略,防止在分离后,在发动机后效推力作用下分离体与火箭飞行体发生碰撞的情况。目前,现有的解决方法是在火箭的某一级发动机关机后,延长发动机子级分离时间,即增长无动力滑行飞行时间,使发动机燃料尽量耗尽后再进行分离。该种方法虽然可以有效减小发动机后效推力的干扰,但是会造成无动力滑行时间的增加,使火箭损失一部分运载能力。
技术实现思路
1、为克服了现有方法的不足,本发明提供一种防止发动机的后效推力对火箭飞行体产生干扰的控制方法,该方法能够在防止发动机后效推力对火箭飞行体造成姿态干扰的同时,还避免火箭出现运载能力的损失,从而提高火箭飞行的飞行效率以及运载能力。
2、本发明所采用的技术方案是,一种防止后效推力对火箭飞行体产生干扰的控制方法,该方法包括下列步骤:
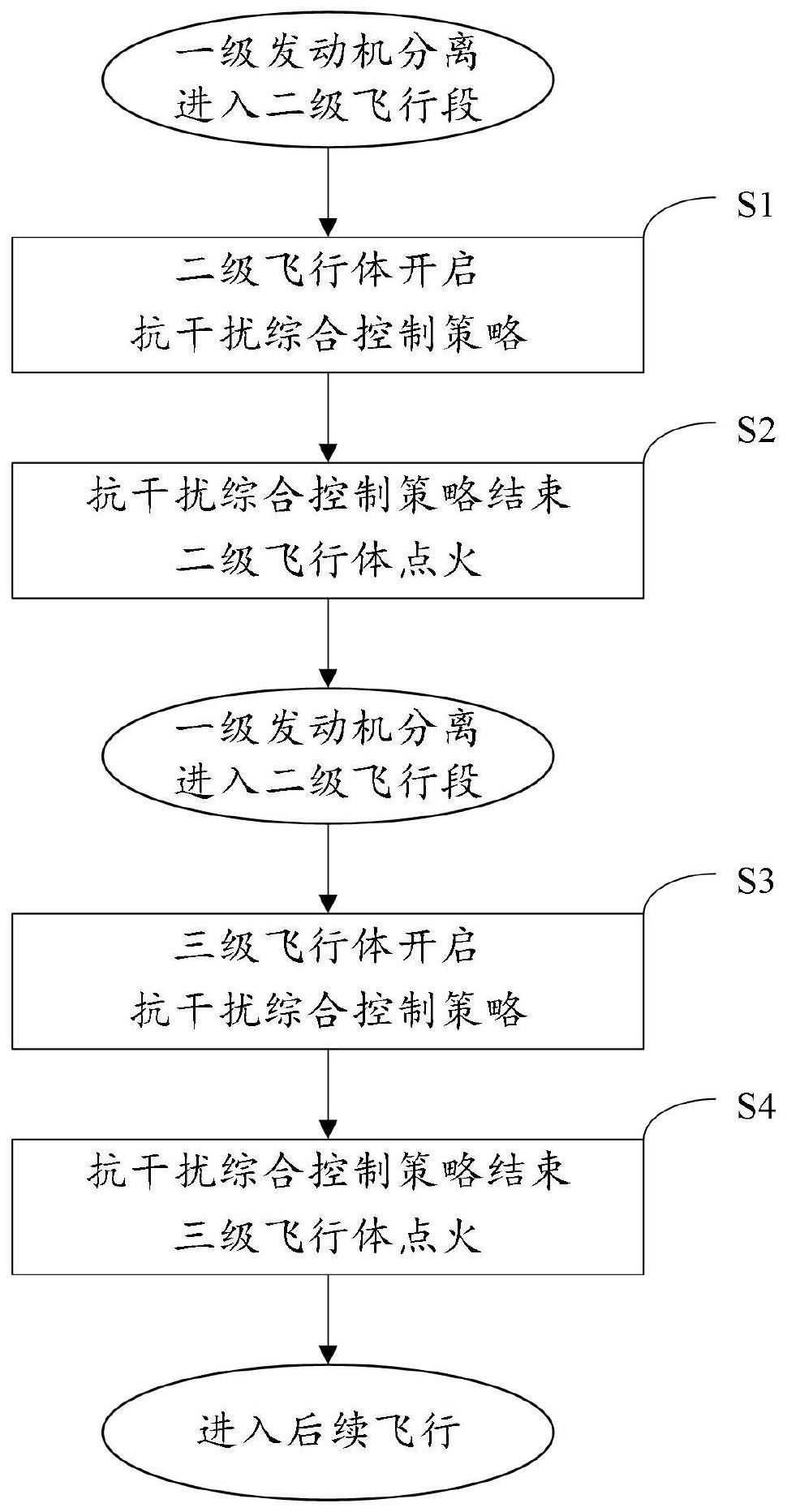
3、s1、火箭的一级发动机分离后,火箭第二级开启抗干扰控制策略进行抗干扰控制飞行,所述的抗干扰控制飞行的持续时间小于或等于n1秒;
4、s2、步骤s1中所述的抗干扰控制飞行完成后,火箭的第二级进入后续飞行阶段;
5、s3、火箭的二级发动机分离后,火箭第三级开启抗干扰控制策略进行抗干扰控制飞行,所述的抗干扰控制飞行的持续时间小于或等于n1秒;
6、s4、步骤s3中所述的抗干扰控制飞行完成后,火箭的第三级进入后续飞行阶段;
7、在步骤s2和步骤s3中,所述的开启抗干扰控制策略进行抗干扰控制飞行的具体过程为:判断火箭飞行体是否处于姿态稳定状态,如果箭体没有处于姿态稳定状态,则首先通过火箭飞行体中的姿态稳定控制回路来对火箭飞行体的姿态进行控制,使火箭飞行体的姿态处于稳定状态,然后对箭体的质心进行机动控制;如果火箭飞行体处于姿态稳定状态,则直接对火箭飞行体的质心进行机动控制;
8、所述的对火箭飞行体的质心进行机动控制的具体过程为:在火箭飞行体的俯仰偏航方向,通过开启质心机动控制策略使火箭飞行体沿着箭体坐标系的y轴和z轴方向进行一定距离的平行移动,使火箭飞行体脱离原始的运动轨迹。
9、本发明的有益效果是:采用上述一种防止后效推力对火箭飞行体产生干扰的控制方法,在火箭的某一级发动机分离后,火箭飞行体开启抗干扰控制策略进行抗干扰控制飞行一段时间后再进入后续飞行阶段,在抗干扰控制飞行的过程中,首先判断火箭飞行体是否处于姿态稳定状态,当火箭飞行体处于姿态稳定状态后,对火箭飞行体的质心进行机动控制,使火箭飞行体脱离原始的运动轨迹后再继续进入后续飞行阶段,一旦火箭飞行体脱离原始的运动轨迹,就可以有效的分离的发动机在推力后效的作用下对火箭发生追尾的风险,并且该种方法无需增长无动力滑行飞行时间,同时避免了火箭运载能力的损失,从而提高了火箭飞行的飞行效率以及运载能力。
10、作为优选,所述的通过火箭飞行体中的姿态稳定控制回路来对火箭飞行体的姿态进行控制的具体过程包括下列步骤:
11、(1.1)、通过姿态敏感器实时采集火箭飞行体的俯仰姿态角,并与设定的理论俯仰姿态角进行做差得到俯仰姿态角偏差将俯仰姿态角偏差输入到滤波器中进行滤波,滤波后的俯仰姿态角偏差输入到校正网络,由校正网络输出控制量pcy(i)、pcz(i)、pcx(i),其中,i表示火箭飞行体在时域中第i个点的离散值;
12、(1.2)、控制量pcy(i)、pcz(i)、pcx(i)输入进控制门限模块与开关限进行比较,由控制门限输出对火箭姿控喷管的控制指令py(i)、pz(i)、px(i);再将控制指令py(i)、pz(i)、px(i)输入进智能节能模块进行处理,得到最终输出到火箭侧喷流姿控发动机的动作指令py_out(i)、pz_out(i)、px_out(i)。
13、通过上述过程来对火箭飞行体中的姿态稳定控制回路进行闭环控制,使火箭飞行体趋于姿态稳定状态,从而来完成对火箭飞行体的质心机动控制。
14、作为优选,将控制指令py(i)、pz(i)、px(i)输入进智能节能模块进行处理的具体过程为:对当前时刻的前n个采样周期中采样得到的火箭侧喷流姿控发动机输出的动作指令进行统计,通过统计得到在前n个周期中火箭侧喷流姿控发动机累计的开启次数,如果累计的开启次数达到设定的初始参数值m时,则关闭姿控发动机输出的动作指令;如果累计的开启次数小于设定的初始参数值m时,则进入对初始参数值m的自适应变参设计。
15、作为优选,所述的对初始参数值m的自适应变参设计的具体过程为:判断连续s个采样周期内的俯仰姿态角偏差的绝对值是否均大于标定值,标定值=控制门限值+0.2°,如果均大于标定值,则m=m+2;如果不满足均大于标定值,则m保持不变。
16、作为优选,所述的判断火箭飞行体是否处于姿态稳定状态的具体过程为:箭上计算机读取姿态稳定控制回路中由校正网络输出的控制量pcy(i)、pcz(i)、pcx(i),并判断是否满足条件:|pcy(i)|≤ry,且|pcz(i)|≤rz,且|pcx(i)|≤rx,其中,ry、rz、rx表示设定的阈值;若满足该条件,则表示箭体处于姿态稳定状态,若不满足该条件,则表示箭体没有处于姿态稳定状态。
17、作为优选,所述的通过开启质心机动控制策略使火箭飞行体沿着箭体坐标系的y轴和z轴方向进行一定距离的平行移动的具体过程为:箭上计算机读取姿态稳定控制回路中由校正网络输出的控制量pcy(i)和pcz(i),如果满足pcy(i)>0,且pcz(i)>0,则执行指令:先将火箭侧喷流喷管t3、t4、t7、t8开启s1秒后关闭,再将火箭侧喷流喷管t2、t4、t6、t8开启s1秒后关闭,完成对火箭飞行体的质心机动控制;如果满足pcy(i)≤0,且pcz(i)≤0,则执行指令:先将火箭侧喷流喷管t1、t2、t5、t6开启s1秒后关闭,再将火箭侧喷流喷管t1、t3、t5、t7开启s1秒后关闭,完成对火箭飞行体的质心机动控制;如果仅满足pcy(i)>0,则执行指令:先将火箭侧喷流喷管t3、t4、t7、t8开启s1秒后关闭,再将火箭侧喷流喷管t1、t3、t5、t7开启s1秒后关闭,完成对火箭飞行体的质心机动控制;如果仅满足pcz(i)>0,则执行指令:先将火箭侧喷流喷管t1、t2、t5、t6开启s1秒后关闭,再将火箭侧喷流喷管t2、t4、t6、t8开启s1秒后关闭,完成对火箭飞行体的质心机动控制。
- 还没有人留言评论。精彩留言会获得点赞!