一种无人机弹射控制方法、装置、设备和存储介质与流程
本技术涉及无人机弹射的,尤其是涉及一种无人机弹射控制方法、装置、设备和存储介质。
背景技术:
1、目前,无人机技术得到飞速发展和广泛应用,无人机弹射架是无人机起飞的一个辅助设备,用于使无人机在起飞时获得较大的初始速度。
2、无人机应用在山林防火监控的场景下时,由于山林的环境复杂,对无人机弹射的要求提高,传统的监控依靠人工经验辅助无人机进行弹射,容易出现弹射失误的情况,对此情况有待进一步改善。
技术实现思路
1、为了解决现有的依靠人工经验辅助无人机进行弹射容易出现弹射失误的问题,本技术提供一种无人机弹射控制方法、装置、设备和存储介质,采用如下的技术方案:
2、第一方面,本技术提供一种无人机弹射控制方法,包括如下步骤:
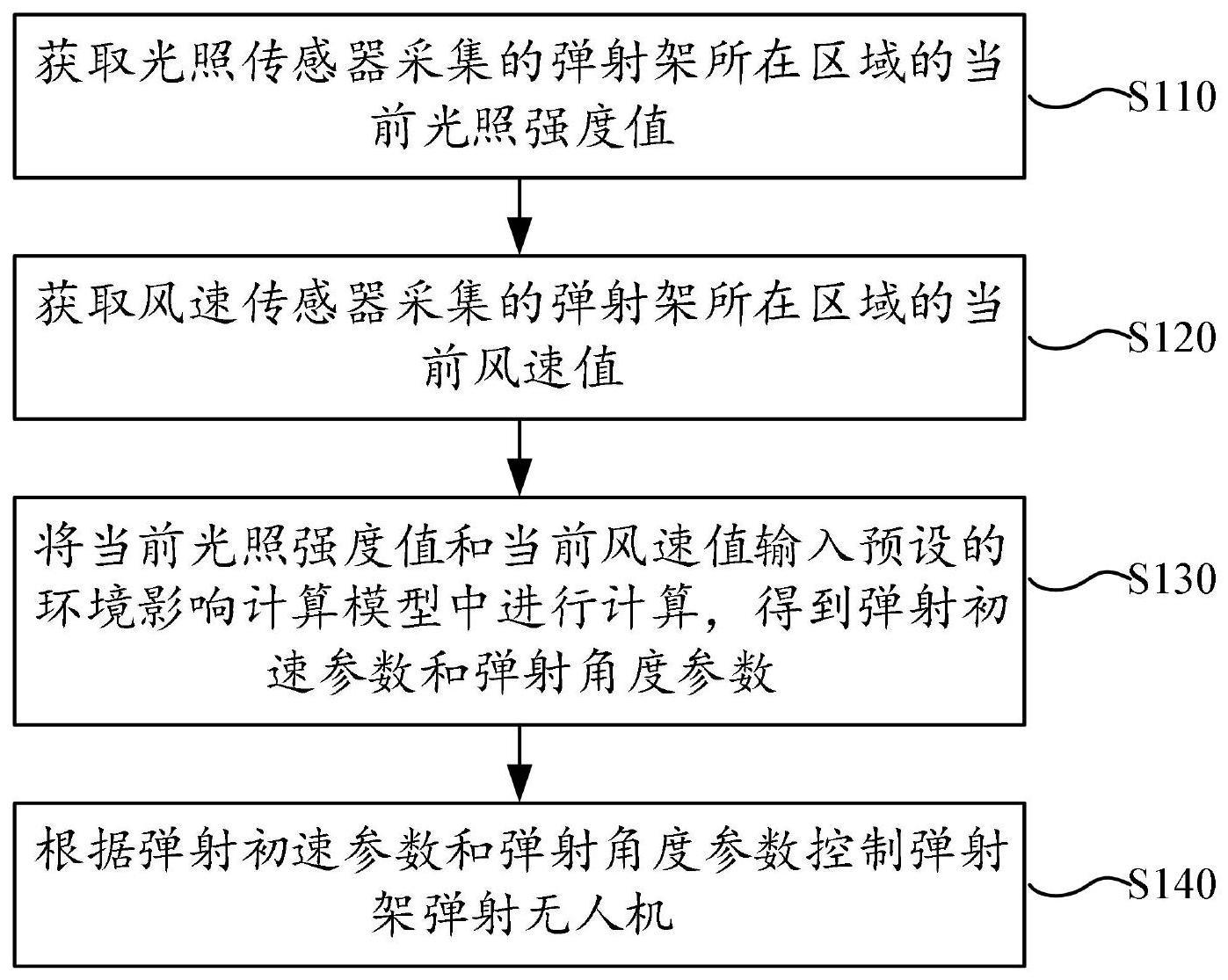
3、获取光照传感器采集的弹射架所在区域的当前光照强度值;
4、获取风速传感器采集的弹射架所在区域的当前风速值;
5、将所述当前光照强度值和所述当前风速值输入预设的环境影响计算模型中进行计算,得到弹射初速参数和弹射角度参数;
6、根据所述弹射初速参数和所述弹射角度参数控制弹射架弹射无人机。
7、通过采用上述技术方案,本技术通过光照传感器对弹射架所在区域的光照强度进行监测,通过风速传感器对风速进行监测,得到当前光照强度值和当前风速值,然后输入环境影响计算模型中进行计算,得到弹射初速参数和弹射角度参数,从而控制弹射架弹射无人机,通过此,本技术调节弹射初速参数和弹射角度参数,从而使得无人机适应于光照强度,使无人机弹射初期拍摄的图像能够稳定在合适的曝光度,防止过曝或过暗的情况出现,同时能够使无人机适应于风速大小,减少弹射初期风速对无人机飞行的影响,使无人机飞行更加稳定,最后使弹射架在无人监督能够自动根据环境因素灵活调整弹射架的弹射参数,进而实现精准弹射的技术效果,从而利用无人机进行山林防火监控。
8、可选的,所述将所述当前光照强度值和所述当前风速值输入预设的环境影响计算模型中进行计算,得到弹射初速参数和弹射角度参数,包括:
9、根据所述当前光照强度值、所述当前风速值、预设弹射初速和预设弹射角度,采用环境影响计算模型进行弹射初速参数计算,得到所述弹射初速参数;
10、所述弹射初速参数计算公式形式为:v=v0+k1(i-i0)+k2(f-f0),其中,v表示弹射初速参数,i表示当前光照强度值,i0表示环境影响计算模型的参照光照强度,v0表示在i0时对应的预设弹射初速,k1表示光照强度对弹射初速变化的敏感程度,f表示当前风速值,f0表示环境影响计算模型的参照风速,k2表示风速对弹射初速变化的敏感程度;
11、根据所述当前风速值以及预设弹射角度,采用环境影响计算模型进行弹射角度参数计算,得到所述弹射角度参数;
12、所述弹射角度参数计算公式形式为:a=a0+k3(f-f0),其中,a表示弹射初速参数,f表示当前风速值,f0表示环境影响计算模型的参照风速,a0表示在f0时对应的预设弹射角度,k3表示风速对弹射角度变化的敏感程度。
13、通过采用上述技术方案,本技术通过建立环境影响计算模型,自动根据当前光照强度值和当前风速值计算弹射初速参数和弹射角度参数,其中,弹射初速参数根据当前光照强度值以及当前风速值按照公式进行计算,弹射角度参数按照当前风速值进行计算,并具体给出了计算的公式,可以定量描述环境参数对弹射控制的影响,有效提高弹射控制的精确性和精度。
14、可选的,所述采用环境影响计算模型进行弹射初速参数计算,得到所述弹射初速参数之前,所述方法还包括:
15、获取所述弹射架所在区域的历史火情发生次数和历史火情发生规模;
16、根据所述历史火情发生次数和所述历史火情发生规模确定所述区域的火险等级的高低;
17、根据所述火险等级调节所述k1、k2、k3的值,其中,所述火险等级越高,所述k1、k2、k3的值越小。
18、通过采用上述技术方案,本技术通过获取弹射架所在区域的历史火情发生次数和历史火情发生规模,确定区域的火险等级的高低,然后根据火险等级调节所述k1、k2、k3的值,从而调节在高火险等级的区域采用保守的敏感度调节弹射初速和弹射角度,增加飞行安全。
19、可选的,所述根据所述弹射初速参数和所述弹射角度参数控制弹射架弹射无人机之后,所述方法还包括:
20、获取所述无人机在空中拍摄的环境图像;
21、根据所述环境图像对所述弹射架弹射点周围区域进行三维环境重建,并提取所述三维环境中的障碍物信息;
22、根据所述三维环境重建结果和所述障碍物信息,采用避障算法规划后续无人机从弹射点到任务区域的弹射航线;
23、控制后续无人机按照规划的弹射航线弹射到所述任务区域进行任务。
24、通过采用上述技术方案,由于采用了三维重建和避障规划技术,本技术可以规划弹射路线,实现了考虑环境障碍信息的安全飞行,从而提高无人监督使用时的安全性。
25、可选的,所述采用避障算法规划后续无人机从弹射点到任务区域的弹射航线,包括:
26、根据所述障碍物信息确定避障优先级;
27、根据所述障碍物信息和所述避障优先级,采用避障算法确定在所述弹射初速参数和所述弹射角度参数下,所述无人机从弹射点到所述任务区域的最优避障路线,所述避障算法为a星算法。
28、通过采用上述技术方案,本技术通过障碍物信息确定避障优先级,在计算得出的弹射初速参数和弹射角度参数不变的情况下,根据障碍物信息和避障优先级,采用算法确定无人机弹射点到任务区域的最优避障路线,提高了飞行任务的成功率。
29、可选的,所述根据所述环境图像对所述弹射架弹射点周围区域进行三维环境重建之后,所述方法还包括:
30、将所述当前光照强度值与预设的光照强度阈值进行对比,若所述当前光照强度值大于所述光照强度阈值,则获取当前环境温度值和预设的环境温度阈值;
31、若所述环境温度值大于所述环境温度阈值,则基于所述三维环境重建结果,确定火情区域;
32、基于所述火情区域调整所述弹射初速参数和所述弹射角度参数,以便于后续弹射的无人机快速穿越所述火情区域。
33、通过采用上述技术方案,在山林防火时,可能出现突发火灾灾情,此时光照强度值以及环境温度值均会显著上升,本技术通过采集环境温度值和光照强度值,确定火情区域,然后基于火情区域调整弹射初速参数和弹射角度参数,从而针对强光场景更好地控制飞行轨迹,实现对不利环境的复杂适应控制。
34、可选的,所述根据所述环境图像对所述弹射架弹射点周围区域进行三维环境重建之后,所述方法还包括:
35、根据所述三维环境重建结果和所述障碍物信息,确定所述弹射架弹射点周围区域的障碍物密集程度;
36、若所述密集程度超过程度阈值,则增大所述弹射初速参数,并调整所述弹射角度参数,以使后续弹射的无人机快速掠过所述障碍物。
37、通过采用上述技术方案,本技术根据三维环境重建结果和障碍物信息,确定弹射架弹射点周围的障碍物密集程度,在密集程度超过阈值时调整弹射初速参数和弹射角度参数,从而使后续弹射的无人机快速掠过障碍物。
38、第二方面,本技术提供一种无人机弹射控制装置,包括:
39、光照强度获取模块,用获取光照传感器采集的弹射架所在区域的当前光照强度值;
40、风速获取模块,用于获取风速传感器采集的弹射架所在区域的当前风速值;
41、参数计算模块,用于将所述当前光照强度值和所述当前风速值输入预设的环境影响计算模型中进行计算,得到弹射初速参数和弹射角度参数;
42、弹射控制模块,用于根据所述弹射初速参数和所述弹射角度参数控制弹射架弹射无人机。
43、第三方面,本技术提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述无人机弹射控制方法的步骤。
44、第四方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述无人机弹射控制方法的步骤。
45、综上所述,本技术包括以下至少一种有益技术效果:
46、1.本技术通过光照传感器对弹射架所在区域的光照强度进行监测,通过风速传感器对风速进行监测,得到当前光照强度值和当前风速值,然后输入环境影响计算模型中进行计算,得到弹射初速参数和弹射角度参数,从而控制弹射架弹射无人机,通过此,本技术调节弹射初速参数和弹射角度参数,从而使得无人机适应于光照强度,使无人机弹射初期拍摄的图像能够稳定在合适的曝光度,防止过曝或过暗的情况出现,同时能够使无人机适应于风速大小,减少弹射初期风速对无人机飞行的影响,使无人机飞行更加稳定,最后使弹射架在无人监督能够自动根据环境因素灵活调整弹射架的弹射参数,进而实现精准弹射的技术效果,从而利用无人机进行山林防火监控;
47、2.本技术通过获取弹射架所在区域的历史火情发生次数和历史火情发生规模,确定区域的火险等级的高低,然后根据火险等级调节所述k1、k2、k3的值,从而调节在高火险等级的区域采用保守的敏感度调节弹射初速和弹射角度,增加飞行安全;
48、3.本技术通过采集环境温度值和光照强度值,确定火情区域,然后基于火情区域调整弹射初速参数和弹射角度参数,从而针对强光场景更好地控制飞行轨迹,实现对不利环境的复杂适应控制。
- 还没有人留言评论。精彩留言会获得点赞!