一种光电瞄具中的图像稳定控制方法、装置和存储介质与流程
本发明涉及图像采集领域,具体涉及一种光电瞄具中的图像稳定控制方法、装置和存储介质。
背景技术:
1、在光电瞄具中跟踪功能是必不可少的功能,所谓巧妇难为无米之炊,跟踪算法解算是基于收到的图像画面。收到的图像画面越清晰稳定,其跟踪抓取目标的效果会更好。这很大程度上依赖于成像设备的帧频和光电瞄具的伺服系统。但有些成像设备的帧频不能满足效果,光电瞄具运动时每帧传输给跟踪模块的图像模糊,这会造成跟踪模块锁定目标失败。这时候就需要在伺服系统上进行优化算法来弥补成像系统的不足。
技术实现思路
1、有鉴于此,本发明提供了一种光电瞄具中的跟踪目标的图像稳定控制方法,包括:
2、步骤1,将跟踪过程划分为多个阶段,每个阶段对应一个脱靶量阈值;
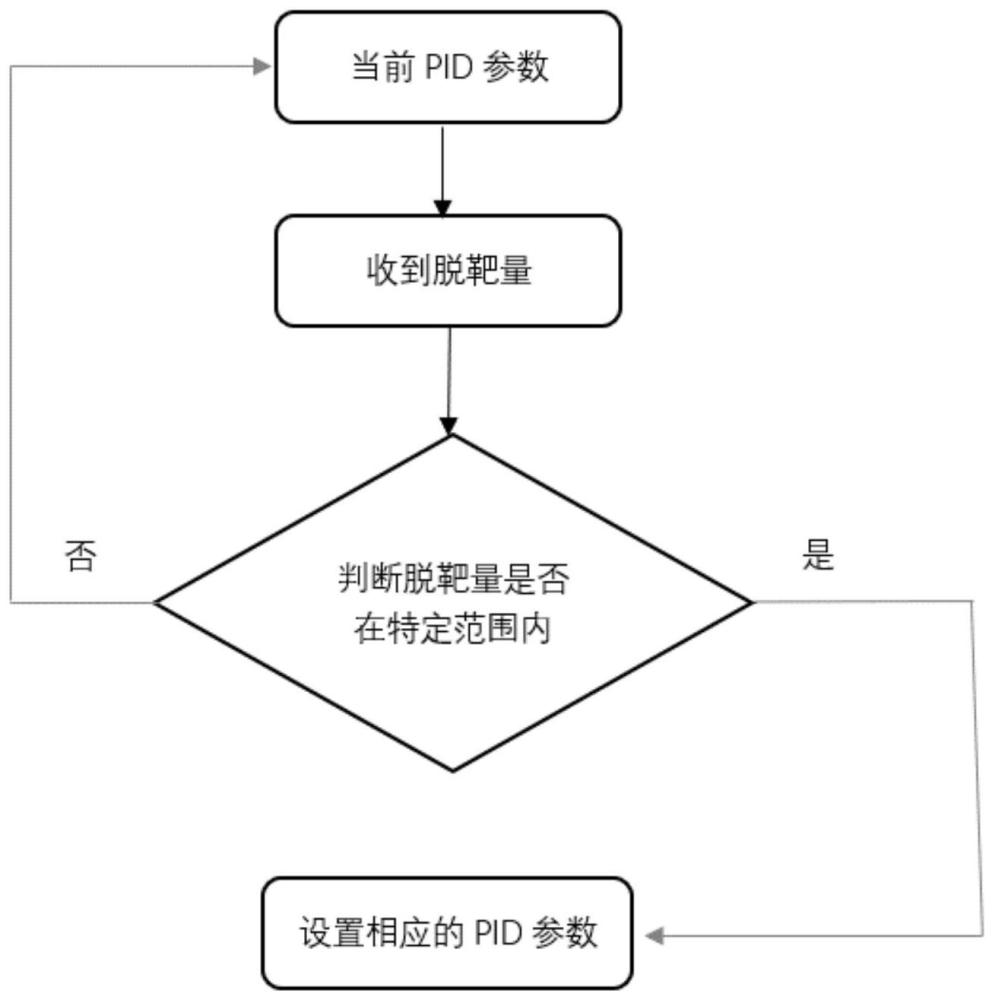
3、步骤2,实时获取光电瞄具中的跟踪目标的脱靶量;
4、步骤3,根据当前阶段的脱靶量阈值,查找匹配的一组控制参数,所述控制参数包括伺服电机的pid控制参数;
5、步骤4,应用所述pid控制参数对图像采集设备和伺服电机进行控制,改变输出给所述伺服电机的电压和伺服电机的运动速度;
6、步骤5,多阶段控制采用递减的脱靶量阈值,当脱靶量减小到当前阶段的阈值以下时,进入下一阶段,重复步骤3至4,直至完成跟踪目标的捕获。
7、特别地,所述光电瞄具俯仰轴运动范围为正九十度到负四十五度,以水平方向为零度;方位轴运动范围为零度到三百六十度;在开始跟踪时,所述光电瞄具切换运动模式同时开启跟踪,使俯仰轴定位运动到一个固定角度,方位轴在两个设定角度之间进行往复运动。
8、特别地,所述pid控制参数包括:比例增益系数kp,积分增益系数ki;通过设置所述pid控制参数,改变输出给电机的电压。
9、特别地,在开始跟踪时,设置所述pid控制参数包括:将比例增益系数kp设置为第一比例增益系数,设置积分增益系数ki为第一积分增益系数,此时输出给电机的电压为第一电压。
10、特别地,所述步骤2中,所述光电瞄具运动过程中跟踪目标出现在视野中,此时跟踪模块识别跟踪目标并对跟踪目标进行框选,同时向控制模块实时传输视野中跟踪目标脱靶量。
11、特别地,所述步骤3中当所述脱靶量大于第一阈值,则将所述光电瞄具中止当前运动模式,改变运动方向使跟踪目标移动带视野中央。
12、特别地,所述步骤4中当所述脱靶量小于第一阈值,大于第二阈值,则分别将所述比例增益系数kp设置为第二比例增益系数,设置所述积分增益系数ki为第二积分增益系数,此时输出给电机的电压为第二电压,其中所述第二比例增益系数小于所述第一比例增益系数,所述第二积分增益系数小于所述第一积分增益系数,所述第二电压小于所述第一电压。
13、特别地,所述步骤5中当所述脱靶量小于1时,此时所述跟踪目标已在视野中央,完成跟踪目标的捕获。
14、本发明还提出一种光电瞄具中的跟踪目标的图像稳定控制装置,包括:
15、脱靶量阈值设置模块,用于将跟踪过程划分为多个阶段,每个阶段对应一个脱靶量阈值;
16、脱靶量采集模块,用于实时获取光电瞄具中的跟踪目标的脱靶量;
17、脱靶量阈值匹配模块,用于根据当前阶段的脱靶量阈值,查找匹配的一组控制参数,所述控制参数包括伺服电机的pid控制参数;
18、伺服电机控制模块,用于应用所述pid控制参数对图像采集设备和伺服电机进行控制,改变输出给所述伺服电机的电压和伺服电机的运动速度;
19、跟踪目标捕获完成模块,用于多阶段控制采用递减的脱靶量阈值,当脱靶量减小到当前阶段的阈值以下时,进入下一阶段,重复应用脱靶量阈值匹配模块和伺服电机控制模块,直至完成跟踪目标的捕获。
20、本发明还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现所述的光电瞄具中的跟踪目标的图像稳定控制方法。
21、有益效果:
22、1)对传输回来的脱靶量进行多段判定,保证了伺服系统的稳定运动;
23、2)降低了图像设备的参数需求,进而降低的产品成本;
24、3)通过根据脱靶量实时调整控制参数,可显著提高光电瞄具的图像稳定性和跟踪精度;
25、4)可适应不同的参数图像采集设备,降低对设备性能的依赖;
26、5)使光电瞄具系统在跟踪运动时,传输给跟踪模块的图像保持清晰完整;
27、6)伺服电机的速度变化平稳,有利于保持跟踪控制的稳定;
28、7)采用闭环控制,可以自适应环境与目标的变化,实现鲁棒跟踪。
技术特征:
1.一种光电瞄具中的跟踪目标的图像稳定控制方法,其特征在于,包括:
2.如权利要求1所述的光电瞄具中的跟踪目标的图像稳定控制方法,其特征在于,所述光电瞄具俯仰轴运动范围为正九十度到负四十五度,以水平方向为零度;方位轴运动范围为零度到三百六十度;在开始跟踪时,所述光电瞄具切换运动模式同时开启跟踪,使俯仰轴定位运动到一个固定角度,方位轴在两个设定角度之间进行往复运动。
3.如权利要求2所述的光电瞄具中的跟踪目标的图像稳定控制方法,其特征在于,所述pid控制参数包括:比例增益系数kp,积分增益系数ki;通过设置所述pid控制参数,改变输出给电机的电压。
4.如权利要求3所述的光电瞄具中的跟踪目标的图像稳定控制方法,其特征在于,在开始跟踪时,设置所述pid控制参数包括:将比例增益系数kp设置为第一比例增益系数,设置积分增益系数ki为第一积分增益系数,此时输出给电机的电压为第一电压。
5.如权利要求4所述的光电瞄具中的跟踪目标的图像稳定控制方法,其特征在于,所述步骤2中,所述光电瞄具运动过程中跟踪目标出现在视野中,此时跟踪模块识别跟踪目标并对跟踪目标进行框选,同时向控制模块实时传输视野中跟踪目标脱靶量。
6.如权利要求5所述的光电瞄具中的跟踪目标的图像稳定控制方法,其特征在于,所述步骤3中当所述脱靶量大于第一阈值,则将所述光电瞄具中止当前运动模式,改变运动方向使跟踪目标移动带视野中央。
7.如权利要求6所述的光电瞄具中的跟踪目标的图像稳定控制方法,其特征在于,所述步骤4中当所述脱靶量小于第一阈值,大于第二阈值,则分别将所述比例增益系数kp设置为第二比例增益系数,设置所述积分增益系数ki为第二积分增益系数,此时输出给电机的电压为第二电压,其中所述第二比例增益系数小于所述第一比例增益系数,所述第二积分增益系数小于所述第一积分增益系数,所述第二电压小于所述第一电压。
8.如权利要求7所述的光电瞄具中的跟踪目标的图像稳定控制方法,其特征在于,所述步骤5中当所述脱靶量小于1时,此时所述跟踪目标已在视野中央,完成跟踪目标的捕获。
9.一种光电瞄具中的跟踪目标的图像稳定控制装置,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至8任一项所述的光电瞄具中的跟踪目标的图像稳定控制方法。
技术总结
本发明提出一种光电瞄具中的跟踪目标的图像稳定控制方法、装置和存储介质,该方法包括实时获取光电瞄具中的跟踪目标的脱靶量;将跟踪过程划分为多个阶段,每个阶段对应一个脱靶量阈值;根据当前阶段的脱靶量阈值,查找匹配的一组控制参数,所述控制参数包括伺服电机的PID控制参数;应用所述PID控制参数对图像采集设备和伺服电机进行控制,改变输出给所述伺服电机的电压和伺服电机的运动速度;多阶段控制采用递减的脱靶量阈值,当脱靶量减小到当前阶段的阈值以下时,进入下一阶段,重复执行步骤直至完成跟踪目标的捕获;通过本方案对传输回来的脱靶量进行多段判定,保证了伺服系统的稳定运动,降低了图像设备的参数需求,进而降低的产品成本。
技术研发人员:李玉柱,刘武全
受保护的技术使用者:河北汉光重工有限责任公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!