大尺度差旋尾控制导弹丸
本申请涉及导航,具体而言,涉及一种大尺度差旋尾控制导弹丸。
背景技术:
1、随着现代军事科技的不断发展,弹丸对目标的精确打击成为主要的研究发展方向,了解弹丸在空间中各时刻的位置、速度和方向对其精准制导至关重要。
2、然而,高速弹丸在发射时会受到高达20’000g的高强度冲击,给弹丸带来高速度和高转速,由于巨大的冲击力对弹丸上布置的传感器有一定损害,使传感器测量精度降低,更易受噪声干扰,引起弹丸导航的误差增大。同时,弹丸在飞行过程中处于高速度、高振动状态,使得传感器准确测量弹丸的状态数据更加困难,需要使用数学手段(导航方法),将状态数据与量测数据进行融合,得到最优状态估计值来弥补传感器的误差。因此,研究弹丸的导航方法十分重要。
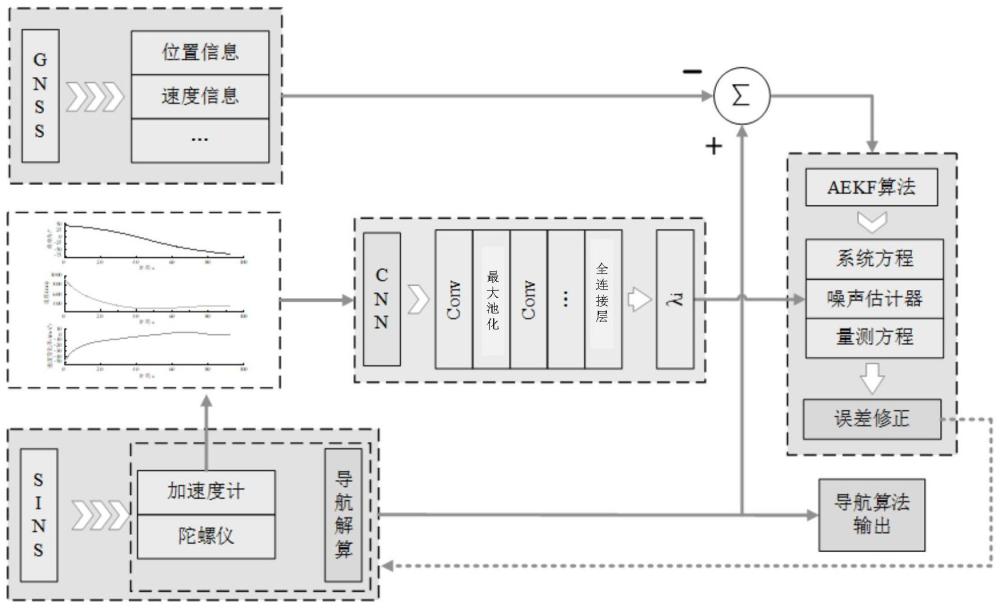
3、由于弹丸在飞行过程中的实际运动都是非线性的,只是在某些条件下非线性较弱,通常采用扩展卡尔曼滤波算法(extended kalman filter,ekf)来估计弹丸的状态。ekf的核心是基于对非线性系统的一阶线性化,然后使用卡尔曼滤波算法来实现对系统的状态估计。传统的ekf算法,其量测噪声协方差矩阵和系统噪声协方差矩阵被设定为常值,但是弹丸在飞行过程中噪声是随机的,导致滤波结果出现误差,并且线性化会造成误差随着卡尔曼增益的增加而增加,使扩展卡尔曼滤波器的收敛性不能得到保证。为了缓解噪声的随机性对系统的影响,现有技术提出了一种自适应扩展卡尔曼滤波算法(adaptive ekf,aekf),在算法迭代的过程中估计量测噪声,从而减小系统滤波的误差。但是由于弹丸在飞行过程中分为:发射段、升弧段、过顶点段和加速下降段。每个阶段弹丸系统运动规律和所受的随机噪声变化不同,量测噪声特性会随之发生变化。一般aekf算法的噪声估计器参数在算法迭代中不会根据弹丸的飞行阶段不同去立刻做出调整,这也使得传统aekf算法用在缓解噪声随机性对系统的影响时效果并不显著。
4、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种大尺度差旋尾控制导弹丸,以至少解决由于弹丸高速旋转时空气阻力对减旋翼片的作用导致获取的弹丸的运动参数不稳定的技术问题。
2、根据本发明实施例的一个方面,提供了一种大尺度差旋尾控制导弹丸,包括:主弹体;船尾,与所述主弹体固接,所述船尾上设置有多个减旋翼片,所述多个减旋翼片被配置为当所述弹丸处于以大于预设速度阈值的速度自旋状态时,在离心力的作用下,迅速向远离所述弹丸的轴线的方向弹出,但不离开所述弹体。
3、在本发明实施例中,大尺度差旋尾控制导弹丸包括主弹体和船尾,其中船尾与所述主弹体固接,所述船尾上设置有多个减旋翼片,所述多个减旋翼片被配置为当所述弹丸处于以大于预设速度阈值的速度自旋状态时,在离心力的作用下,迅速向远离所述弹丸的轴线的方向弹出,但不离开所述弹体。本申请解决了由于弹丸高速旋转时空气阻力对减旋翼片的作用导致获取的弹丸的运动参数不稳定的技术问题。
技术特征:
1.一种大尺度差旋尾控制导弹丸,其特征在于,包括弹体,所述弹体包括:
2.根据权利要求1所述的弹丸,其特征在于,所述多个减旋翼片还被配置为借助所述弹丸以大于所述预设速度阈值的速度旋转时空气阻力对所述多个减旋翼片的作用,使所述船尾的转速降低。
3.根据权利要求2所述的弹丸,其特征在于,所述船尾的背离所述主弹体的底面上设置有与所述多个减旋翼片对应的多个翼片插槽,所述多个减旋翼片通过所述多个翼片插槽与所述船尾固接。
4.根据权利要求3所述的弹丸,其特征在于,所述多个翼片插槽为4个,所述多个翼片插槽之间的间距相等,且沿着所述多个翼片插槽的沟槽的直线交汇于所述船尾的底面的中心。
5.根据权利要求1所述的弹丸,其特征在于,所述弹丸上还设置有:
6.根据权利要求5所述的弹丸,其特征在于,
7.根据权利要求5所述的弹丸,其特征在于,所述微型处理器还被配置为:
8.根据权利要求7所述的弹丸,其特征在于,所述微型处理器还被配置为:
9.根据权利要求8所述的弹丸,其特征在于,所述微型处理器还被配置为:
10.根据权利要求9所述的弹丸,其特征在于,所述微型处理器还被配置为:
技术总结
本申请提供了一种大尺度差旋尾控制导弹丸,该弹丸包括:主弹体;船尾,与所述主弹体固接,所述船尾上设置有多个减旋翼片,所述多个减旋翼片被配置为当所述弹丸处于以大于预设速度阈值的速度自旋状态时,在离心力的作用下,迅速向远离所述弹丸的轴线的方向弹出,但不离开所述弹体。本申请解决了由于弹丸高速旋转时空气阻力对减旋翼片的作用导致获取的弹丸的运动参数不稳定的技术问题。
技术研发人员:刘宁,沈凯,付梦印,苏中,王良明,邓志红,杨志伟,袁超杰
受保护的技术使用者:北京信息科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!