基于BP神经网络的时空约束智能协同制导方法及系统
本发明属于协同制导领域。
背景技术:
1、近年来,为提升打击效能,协同制导技术得到越来越多的关注。协同制导的多枚导弹可以看作是仅基于简单控制律即可相互协作以实现任务目标的多智能体系统。多枚导弹协同作战在效能上要优于单个高技术和高成本的飞行器。此外,多枚导弹构成的多智能体系统也会比单个飞行器具有更强的作战能力。其中,多枚处于不同初始条件的导弹实现对目标的同时打击是一个极具挑战的问题。
2、目前,多弹同时攻击协同制导律可以分为两类。第一类是为协同制导系统指定期望的攻击时间。min-jea tahk等提出了一种非奇异滑模制导律使导弹在指定的时间打击目标;xiaodong liu等基于自适应滑模设计了一种指定攻击时间和攻击角度的制导律。然而,为处于不同初始条件下的多枚导弹指定同一个攻击时间显然是有困难的。此外,各枚导弹间没有交互,降低了多弹协同制导系统对环境的敏感性。另一种方法是由系统中的各枚导弹相互协调,对齐攻击时间。min-jea tahk等对比例导引制导律进行拓展,设计了多弹协同攻击制导律。然而,该制导律要求每枚导弹都要有整个系统的全局信息,为集中式控制,通讯负担较重。此后,jialing zhou等基于李雅普诺夫理论设计了有限时间收敛的分布式协同攻击制导律。abhinav sinha等设计了一种超螺旋滑模制导律,使制导指令更加平滑。李文等基于一致性理论,选取飞行器与目标的相对距离和接近速度为协调变量,设计了无动力飞行器在速度时变情况下的分布式时间协同三维制导方法。jeon等在比例导引律的基础上,将导弹之间剩余时间的误差项引入到导航比中,通过减小剩余飞行时间的方差实现多导弹的协同制导。赵世钰等将协调变量、协调函数应用到协同制导的研究中,选择导弹的剩余时间作为协调变量,实现了多导弹的齐射攻击。张友安等在协同制导研究中引入了“leader-follower”的编队控制方式,定义了弹群中的领弹、被领弹的概念。赵启伦等在“领弹-被领弹”的模型下,利用多智能体二阶一致性算法对被领弹进行控制,从而实现了被领弹对领弹的跟踪,完成多导弹的协同制导任务。基于神经网络或深度学习网络的制导律需要最优化样本进行训练,样本数量一定程度上决定了智能制导律可应用的交战环境,即某些不在样本中的交战环境可能使制导律失效。为了简化制导律设计,提高制导律鲁棒性,brian gaudet等基于元强化学习设计了拦截器末制导律。南英等对传统深度q网络(dqn)的记忆池生成方法进行改进,提出了一种基于markov决策过程的弹道导弹中段突防控制模型。强化学习技术不需要深度学习所需要的样本,也无需设计控制器的结构,可自主探索实现奖励值最大的动作。
3、上述智能制导律仅针对单个弹,而不是“弹群”。胡仕友等总结了导弹武器智能精确制导技术的发展现状并对发展趋势做了分析,指出开展多弹间信息交互与协同处理技术研究,实现群体的分布式智能化协作,是未来导弹武器智能精确制导技术发展的重要方向。shao等利用径向基函数(radial basis function,rbf)神经网络实时估计目标运动信息,减少三维运动模型中的耦合干扰。从而使制导律能够自适应参数的变化,提高了制导律的鲁棒性。li等提出了一种用于拦截具有落角和横向加速度指令约束的非机动目标的制导律,该制导律将滑模控制方法与小波神经网络相结合,提高了系统的鲁棒性,减小了系统的抖振。lai等基于lyapunov稳定性理论,提出了一种基于非线性扩张状态观测器的神经自适应快速终端滑模动态面控制方法,保证了系统的稳定性。李解等为提高末制导精度,根据滑模变结构理论推导了一种基于零化视线角速率的滑模制导律,利用rbf神经网络对切换项增益进行在线估计,并将所设计的rbf滑模制导律与滑模制导律、比例导引律进行仿真对比。佟廷帅等为了解决滑模制导律在拦截高速、大机动目标存在视线角速率抖振现象以及忽略自动驾驶仪动态特性等问题,结合变结构控制理论和神经网络,提出一种基于rbf神经网络调节增益的滑模制导律。rajagopalan等详细地分析了使用神经网络设计制导律的可行性及优势。徐洋针对红外空空导弹在目标机动和红外诱饵干扰情况下利用长短期记忆(long-short term memory,lstm)网络设计具有抗干扰能力的智能制导律。filici等考虑到扰动的随机性,设计了一款在线神经网络制导律。一旦扰动出现,神经网络就会进行在线补偿。研究满足多约束和不确定条件下的制导律问题。可能的思路是先放宽约束条件和建立粗略的不确定模型,利用现有的控制理论设计带有约束变量和不确定参量的制导律;然后构建仿真系统,在遍历所要约束条件和不确定环境下进行大量的制导仿真,获得带有标签的样本;接着利用人工智能中神经网络或强化学习等强大学习和推理能力,自适应的估计出约束变量和不确定的参量,从而获得多约束和不确定条件下的智能制导律。也可以直接基于约束条件和不确定环境下对制导影响的主要特征参数,构建合适的深度学习神经网络,通过离线和在线性学习的方法获得智能制导律。还有部分文献根据飞行器编队要求和实际位置,生成一系列动态虚拟制导点,并基于模型预测控制,利用实时状态作为输入对神经网络制导模型进行在线训练,完成飞行器编队控制。还有文献提出了对飞行器采用导引回路和姿态回路分离控制策略,采用l1导引算法设计一种基于自适应神经网络的飞行控制器,有效提高飞行器的跟踪精度和抗干扰能力。
4、传统估算剩余飞行时间的方法需要一些严格的限制条件,如小前置角、纯比例导引,并且所针对打击的目标为静止目标,故对于时空协同打击高机动目标场景,此类估算方法精确性下降,本发明针对此问题,提出新的技术方案来提高对剩余飞行时间的估计精度。
技术实现思路
1、本发明目的是为了解决现有基于估算剩余飞行时间的智能协同打击目标场景,仅局限于静止目标,对于协同打击高机动目标场景存在估算剩余飞行时间精度低,导致高机动目标准确度低的问题,本发明提供了一种基于bp神经网络的时空约束智能协同制导方法及系统。
2、基于bp神经网络的时空约束智能协同制导方法,该制导方法包括如下步骤:
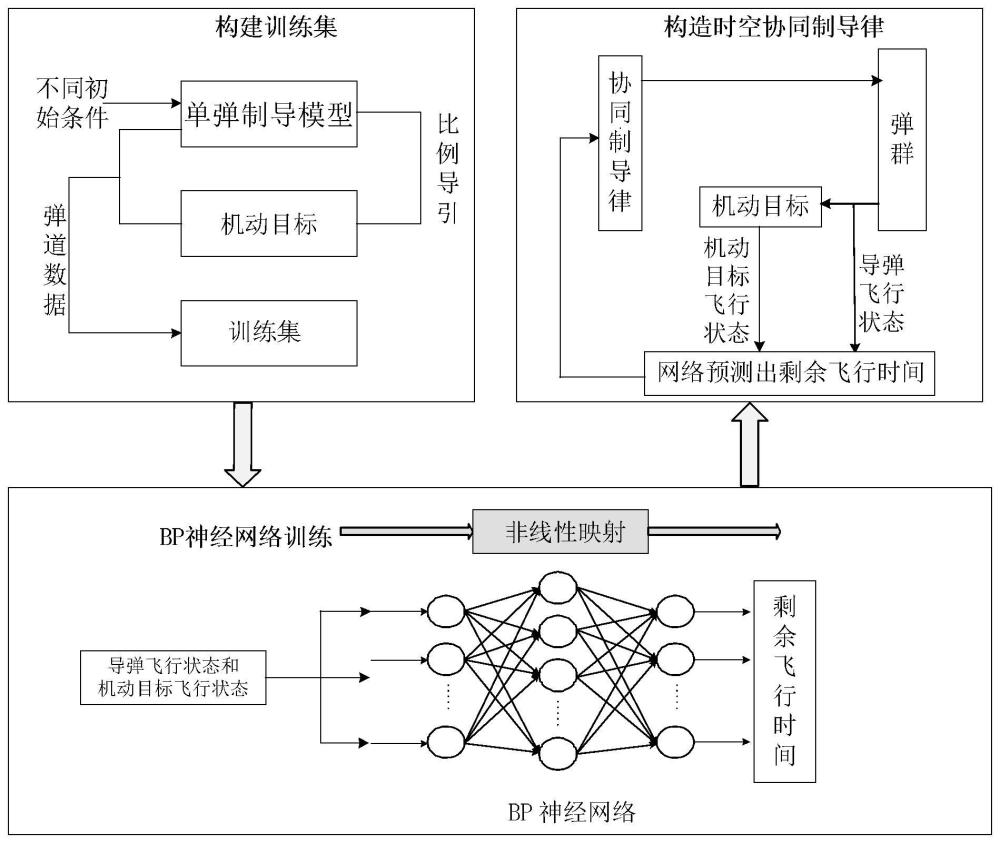
3、步骤1、构建训练集:
4、在不同仿真场景下,单弹制导模型针对机动目标采用给定单弹的比例导引进行仿真,获取各仿真场景下各采样时刻的弹道数据作为样本形成训练集;
5、每个样本包括:作为网络输入数据的弹目相对距离r、弹目视线角q、弹目相对距离导数视线角速率导弹速度vm、导弹速度前置角ηm、目标速度vt和目标加速度at,以及作为网络输出数据的导弹飞向机动目标的剩余飞行时间tgo;
6、步骤2、网络训练:
7、利用训练集对bp神经网络进行训练,获得训练后的bp神经网络;
8、步骤3、利用训练后的bp神经网络预测弹群中各导弹飞向机动目标的剩余飞行时间:
9、将弹群中各导弹的弹目相对距离r、弹目视线角q、弹目接近速度视线角速率导弹速度vm、导弹速度前置角ηm、目标速度vt和目标加速度at作为训练后的bp神经网络的输入,预测出弹群中各导弹飞向机动目标的剩余飞行时间;
10、步骤4、根据预测出的各导弹飞向机动目标的剩余飞行时间,构造各导弹的时空协同制导律,从而实现多导弹对机动目标的协同打击任务。
11、优选的是,仿真场景中的参数包括弹目初始相对距离、弹目初始视线角、导弹初始弹道倾角、目标加速度。
12、优选的是,弹目初始相对距离的变化区间为8000米至12000米,初始弹目视线角的变化区间为-180°至180°,导弹初始弹道倾角的变化区间为-80°至80°,目标加速度的变化区间为-4g至4g。
13、优选的是,通过改变仿真场景中的一个或多个参数取值,形成新的仿真场景。
14、优选的是,bp神经网络的隐含层采用了tanh激活函数,输出层采用了线性输出函数。
15、优选的是,步骤4中根据预测出的各导弹飞向机动目标的剩余飞行时间,构造各导弹的时空协同制导律的实现方式包括:
16、步骤41、根据预测出的所有导弹飞向机动目标的剩余飞行时间,计算各导弹飞向机动目标的剩余飞行时间误差ξi;其中,ξi为第i个导弹飞向机动目标的剩余飞行时间误差;
17、步骤42、根据ξi,获取第i个导弹的时变导航增益
18、步骤43、根据构建第i个导弹的时空协同制导律ami。
19、优选的是,
20、其中,aij为第i个导弹与第j个导弹间的通讯矩阵,且aij的取值为0或1,当aij=0时表示第i个导弹与第j个导弹间无法通讯,当aij=1时表示第i个导弹与第j个导弹间能通讯,tgoj为预测出的第j个导弹飞向机动目标的剩余飞行时间,j=1,2,3……n,tgoi为预测出的第i个导弹飞向机动目标的剩余飞行时间,i=1,2,3……n,n为弹群中导弹总个数。
21、优选的是,
22、其中,n2为协同制导律的导航比,μi,k1i、k2i和μi分别为第i个导弹的第一、第二和第三可调参数,sig(·)为非线性函数,且sign(·)为符号函数。
23、优选的是,
24、其中,vmi为第i个导弹的导弹速度,为第i个导弹的视线角速率,vci为第i个导弹的弹目接近速度,qi为第i个导弹的弹目视线角,qfi为第i个导弹的期望终端视线角,为第i个导弹的飞向机动目标的剩余飞行时间估计值,ri为第i个导弹的弹目相对距离,为第i个导弹的弹目相对距离导数。
25、基于bp神经网络的时空约束智能协同制导系统,包括存储设备、处理器以及存储在所述存储设备中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序实现基于bp神经网络的时空约束智能协同制导方法。
26、本发明的优点:
27、本发明利用bp神经网络对导弹末制导过程中的剩余飞行时间进行预测,进而实现对机动目标的时空约束协同制导。在智能协同制导过程设计中,为了获取网络训练所需的数据,在单弹攻击机动目标的场景下进行了大量的仿真,并且在弹道数据中选取样本特征建立了训练集。在此基础上,对网络进行训练,建立了从导弹状态到剩余飞行时间的映射关系,并将此网络应用于时空协同制导过程中。
28、在多导弹协同攻击目标过程中,导弹飞行状态、目标飞行状态等信息均会对协同进程产生影响,为了对协同制导过程的剩余飞行时间进行精确估计,所选取的神经网络输入数据向量应尽可能多的包含影响剩余时间信息。本发明所选用的导弹飞行状态信息包括弹目相对距离r、弹目视线角q、弹目相对距离导数视线角速率导弹速度vm和导弹速度前置角ηm,目标飞行状态包括目标速度vt和目标加速度at。本发明训练关于剩余飞行时间的bp神经网络,提高对剩余飞行时间的估计精度。本发明与现有技术的不同之处在于:
29、其一、本发明利用神经网络的万能逼近特性,建立了从导弹状态、目标机动特性到剩余飞行时间的映射,有效避免了传统方法中的小前置角假设等缺点。
30、其二、本发明可实现对机动目标的时空约束协同制导,并且不需要复杂的动力学迭代调参过程。
31、本发明通过不同场景下的仿真,结合与传统剩余飞行时间估计方法相对比,验证了本发明所提出的智能协同制导方法进行高机动目标打击时的正确性和有效性。
- 还没有人留言评论。精彩留言会获得点赞!