一种基于视觉感知的无人机捕网发射装置
本发明涉及反无人机,具体涉及是一种基于视觉感知的无人机捕网发射装置。
背景技术:
1、随着国内外无人机市场的迅速发展,以个人消费端为主的微型无人机产品越来越多地应用到不同的领域。此类“低慢小”的空中动态目标为消费者带来愉悦体验的同时无人机在机场、政府办公要地等重要场所的无序飞行和非法侵入是一个紧迫的问题。
2、现有无人机处置方式一般是通过电射枪干扰或者激光照射等技术来迫降和击落无人机,或者在地面近距离地发射弹射系网捕捉,其所采用的方法要么需要配备昂贵的设备,要么由于装置较为笨重,如公布号为cn109850151a的专利公开了一种无人机抓捕网装置和无人机,其中提供了一种手持式网枪无人机捕网装置,需要人工操作,且机动性和有效距离受限。
技术实现思路
1、本发明针对以上问题,提供一种基于视觉感知的无人机捕网发射装置。
2、采用的技术方案是,一种基于视觉感知的无人机捕网发射装置,包括无人机平台、捕网发射结构、机载控制机构;
3、所述捕网发射结构安装在无人机平台上;
4、所述机载控制机构能够接收无人机平台馈送的姿态数据。
5、可选的,捕网发射结构为气动捕网发射结构。
6、可选的,捕网发射结构包括系网、加压空气存储罐、发射筒、触发机构和感知机构;
7、所述系网用于捕获靶机;
8、所述存储罐用于存储加压空气;
9、所述发射筒用于存储系网;
10、所述触发结构用于开闭存储罐;
11、所述感知机构用于估计靶机方位和距离。
12、可选的,感知机构包括深度相机、惯性测量单元和数据处理单元;
13、所述感知机构与发射筒连接;
14、所述深度相机用于采集图像坐标、对应的颜色数据和深度数据,并传递至数据处理单元;
15、所述惯性测量单元用于测量发射筒的滚转和俯仰角信息(θf,ff,);
16、所述数据处理单元对深度相机传递的数据进行处理。
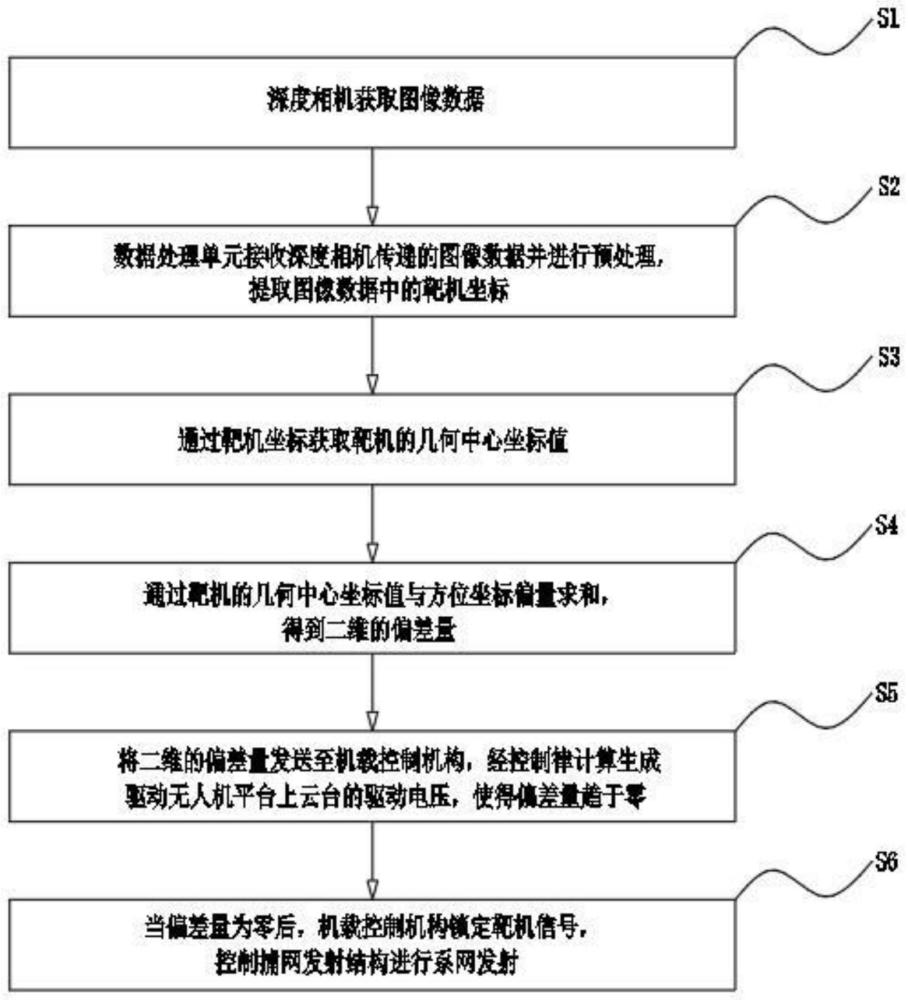
17、可选的,所述感知机构对目标方位距离进行感知,包括以下步骤:
18、s1.深度相机获取图像数据;
19、s2.数据处理单元接收深度相机传递的图像数据并进行预处理,提取图像数据中的靶机坐标;
20、s3.通过靶机坐标获取靶机的几何中心坐标值;
21、s4.通过靶机的几何中心坐标值与方位坐标偏量求和,得到二维的偏差量;
22、s5.将二维的偏差量发送至机载控制机构,经控制律计算生成驱动无人机平台上云台的驱动电压,使得偏差量趋于零;
23、s6.当偏差量为零后,机载控制机构锁定靶机信号,控制捕网发射结构进行系网发射。
24、可选的,s1中,图像数据包括图像色彩数据rgb(x,y)和深度数据d(x,y),其中,(x,y)为图像的像素坐标,对应像素的颜色值为(r,g,b),深度值为d0。
25、可选的,s2中,所述数据处理单元先通过下式将图像色彩数据rgb(x,y)和深度数据d(x,y)转换为灰度值:
26、gray_i=0.299r+0.587g+0.114b;
27、然后,对灰度转换后的图像数据使用直方图均衡化方法提升对比度,使用自适应二值化方法转换为二值图像,以提取靶机特征在图像坐标(w0,h0)中的范围(w,h),并提取对应的深度数据d,构成靶机在深度相机坐标系中的点云坐标值(w,h,d)。
28、可选的,s3中,先将靶机在深度相机坐标系中的点云坐标值(w,h,d)经过滤波器滤波后,再线性修正为发射筒坐标系下的笛卡尔坐标值(w+δw,h+δh,d+δd)i,其中,修正量δw和δh的为深度相机相对发射筒口的安装位置以及安装角度来调整校准获得;
29、然后将发射筒坐标系下索引的靶机全部坐标值(w+δw,h+δh,d+δd)i按下式求平均值:
30、
31、得到靶机的几何中心坐标值
32、可选的,s4中,通过参数发送筒上的由惯性测量单元测量的滚转与俯仰角信息(θf,ff,)和无人机平台的姿态信息(ax,ay,az,ωx,ωy,ωz)得到方位坐标偏量(δu,δv),并将靶机的几何中心坐标值中的与方位坐标偏量(δu,δv)求和,得到二维的偏差量
33、可选的,s5中,经滤波器处理后将二维的偏差量馈送至机载控制机构,经控制律计算并放大信号后生成驱动电压(uw,uv),驱动位于云台上两个正交转轴的电机转动,使坐标差值趋于零,且当该坐标差值的绝对值小于给定阈值(wξ,hξ)时,则开始累加计时或计数;若所述坐标差值的绝对值超出给定阈值(wξ,hξ)时,则累加计时或计数清零。
34、本发明的有益效果至少包括以下之一;
35、1、本发明提供了一种基于视觉感知的无人机捕网发射装置能够通过自主或受控的无人机携带弹射系网捕获空中飞行的非合作无人机。
36、2、同时,本申请提供的装置可由无人机平台携带于空中使用,通过计算机视觉算法估计靶机的相对位置补偿发射角并锁定目标,控制储气罐发射系网,受控或自主地捕捉靶机,具有自主跟踪锁定目标,成本低,重量轻,可重复使用的特点。
37、3、再则结合无人机低空探测系统,可以主动完成特定区域的控制安防巡逻与处置任务。
38、4、解决了现有无人机处置方式一般是通过电射枪干扰或者激光照射等技术来迫降和击落无人机,或者在地面近距离地发射弹射系网捕捉,需要人工操作,且机动性和有效距离受限的问题。
技术特征:
1.一种基于视觉感知的无人机捕网发射装置,其特征在于,包括无人机平台、捕网发射结构、机载控制机构;
2.根据权利要求1所述的一种基于视觉感知的无人机捕网发射装置,其特征在于,所述捕网发射结构为气动捕网发射结构。
3.根据权利要求2所述的一种基于视觉感知的无人机捕网发射装置,其特征在于,所述捕网发射结构包括系网、加压空气存储罐、发射筒、触发机构和感知机构;
4.根据权利要求3所述的一种基于视觉感知的无人机捕网发射装置,其特征在于,所述感知机构包括深度相机、惯性测量单元和数据处理单元;
5.根据权利要求4所述的一种基于视觉感知的无人机捕网发射装置,其特征在于,所述感知机构对目标方位距离进行感知,包括以下步骤:
6.根据权利要求5所述的一种基于视觉感知的无人机捕网发射装置,其特征在于,s1中,图像数据包括图像色彩数据rgb(x,y)和深度数据d(x,y),其中,(x,y)为图像的像素坐标,对应像素的颜色值为(r,g,b),深度值为d0。
7.根据权利要求6所述的一种基于视觉感知的无人机捕网发射装置,其特征在于,s2中,所述数据处理单元先通过下式将图像色彩数据rgb(x,y)和深度数据d(x,y)转换为灰度值:
8.根据权利要求7所述的一种基于视觉感知的无人机捕网发射装置,其特征在于,s3中,先将靶机在深度相机坐标系中的点云坐标值(w,h,d)经过滤波器滤波后,再线性修正为发射筒坐标系下的笛卡尔坐标值(w+δw,h+δh,d+δd)i,其中,修正量δw和δh的为深度相机相对发射筒口的安装位置以及安装角度来调整校准获得;
9.根据权利要求8所述的一种基于视觉感知的无人机捕网发射装置,其特征在于,s4中,通过参数发送筒上的由惯性测量单元测量的滚转与俯仰角信息(θf,ff,)和无人机平台的姿态信息(ax,ay,az,ωx,ωy,ωz)得到方位坐标偏量(δu,δv),并将靶机的几何中心坐标值中的与方位坐标偏量(δu,δv)求和,得到二维的偏差量
10.根据权利要求9所述的一种基于视觉感知的无人机捕网发射装置,其特征在于,s5中,经滤波器处理后将二维的偏差量馈送至机载控制机构,经控制律计算并放大信号后生成驱动电压(uw,uv),驱动位于云台上两个正交转轴的电机转动,使坐标差值趋于零,且当该坐标差值的绝对值小于给定阈值(wξ,hξ)时,则开始累加计时或计数;若所述坐标差值的绝对值超出给定阈值(wξ,hξ)时,则累加计时或计数清零。
技术总结
本发明涉及反无人机技术领域,具体涉及是一种基于视觉感知的无人机捕网发射装置,能够通过自主或受控的无人机携带弹射系网捕获空中飞行的非合作无人机。同时,本申请提供的装置可由无人机平台携带于空中使用,通过计算机视觉算法估计靶机的相对位置补偿发射角并锁定目标,控制储气罐发射系网,受控或自主地捕捉靶机,具有自主跟踪锁定目标,成本低,重量轻,可重复使用的特点。再则结合无人机低空探测系统,可以主动完成特定区域的控制安防巡逻与处置任务。解决了现有无人机处置方式一般是通过电射枪干扰或者激光照射等技术来迫降和击落无人机,或者在地面近距离地发射弹射系网捕捉,需要人工操作,且机动性和有效距离受限的问题。
技术研发人员:尹子栋,唐斌,蒲红平
受保护的技术使用者:成都航空职业技术学院
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!