一种天然橡胶自动采收装置的制作方法
[0001]
本实用新型涉及农业机械领域,尤其涉及一种天然橡胶自动采收装置。
背景技术:
[0002]
橡胶采收需要在橡胶树的表面切割一道螺旋形的痕迹,然后收集由螺旋形痕迹中分泌出来的橡胶汁。使用刀具在橡胶树的表面切割螺旋形痕迹的行为被称作割胶。传动的割胶工人使用常规的刀具手工割胶十分辛苦,为了减轻工人的负担,申请号为201621254121.x的中国专利《一种割胶机》提供了一种能够自动割胶的设备,主要包括轨道、行走机构和切割刀;其缺陷在于:1.切割刀缺乏调整功能,橡胶树本身并非是一个规则的圆柱体,橡胶树皮下的一些特别结构可能对切割刀构成阻挡,使得切割刀受阻而无法前行,这导致现有技术的割胶机在割胶过程中容易遇到障碍而停止,需要工人频繁的调整;2.整个割胶机是固定在橡胶树上,这种固定方式比较麻烦而且对橡胶树的树皮容易造成伤害。
技术实现要素:
[0003]
本实用新型要解决的技术问题是现有技术的割胶机的切割刀缺乏自动调整功能,容易受到各类阻碍而暂停;同时割胶机的固定方式不够方便且容易伤害橡胶树。
[0004]
为解决上述技术问题,本实用新型采用的技术方案为:一种天然橡胶自动采收装置,包括基础支架、底板、第一弧形导轨、第一驱动器、刀具和第二驱动器;
[0005]
第一弧形导轨水平安装在基础支架上,第一弧形导轨应能够环抱橡胶树,第一驱动器驱动底板沿着第一弧形导轨运动;
[0006]
第二驱动器和刀具均安装在底板上,第二驱动器驱动刀具在竖直方向上下运动;当第一驱动器和第二驱动器共同启动时,刀具能够在橡胶树的表面形成一段螺旋线形状的切割痕迹,该切割痕迹用于收获橡胶汁;
[0007]
刀具包括切割刀、刀架、固定板、弹簧、牵拉线和拉线装置,切割刀安装在刀架上,刀架与固定板铰接,固定板用于连接第二驱动器,弹簧和牵拉线分别连接在刀架两侧,拉线装置与牵拉线连接,拉线装置通过牵拉线能够驱动刀架偏转,牵拉线和弹簧共同作用即可精确控制刀架的偏转角度,刀架的偏转角度能够控制切割刀伸入橡胶树表皮的深度,达到满足橡胶收获同时又尽可能保护橡胶树的目的。
[0008]
进一步的,所述刀架上还安装有引导柱,引导柱与切割刀平行;在切割橡胶树表皮的过程中,引导柱始终与橡胶树的表皮贴合,引导柱的作用在于使得切割刀能够随着橡胶树的表皮的起伏而产生对应的起伏,使得切割刀在整个切割过程中始终切割固定的深度。
[0009]
进一步的,所述拉线装置包括拉线电机和线盘,拉线电机驱动线盘旋转,牵拉线缠绕在线盘上。
[0010]
进一步的,橡胶采购装置还包括控制器,所述控制器控制拉线电机,控制器控制拉线电机的正转、反转、转速以及启停,所述固定板上设置有第一限位传感器和第二限位传感
器,第一限位传感器和第二限位传感器分别位于刀架的两侧,当第一限位传感器或第二限位传感器被触发后,控制器停止拉线电机。
[0011]
进一步的,所述第一驱动器包括第一电机、传动齿轮组和主动齿轮,第一电机、传动齿轮组和主动齿轮均安装在底板上,所述第一弧形导轨上设置有内齿,主动齿轮与内齿啮合,第一电机通过传动齿轮组驱动主动齿轮旋转,进而使得底板沿着第一弧形导轨往复运动。
[0012]
进一步的,所述基础支架上或第一弧形导轨上设置有第三限位传感器和第四限位传感器,第三限位传感器和第四限位传感器分别位于第一弧形导轨的两端,所述控制器控制第一电机的启停,当第三限位传感器和第四限位传感器被触发后,控制器停止第一电机。
[0013]
进一步的,所述第二驱动器包括第二电机、竖直导轨、滑块和丝杠,竖直导轨竖直安装在底板上,第二电机驱动丝杠旋转,丝杠与竖直导轨平行,滑块可滑动的安装在竖直导轨上,滑块上设置有螺纹孔,滑块通过螺纹孔套在丝杠上;所述固定板安装在滑块上,即整个刀具与滑块连接,当第二电机驱动丝杠旋转,滑块将带动整个刀具沿着竖直导轨上下运动;
[0014]
所述竖直导轨的两端设置有第五限位传感器和第六限位传感器,所述控制器控制第二电机的启停,当第五限位传感器和第六限位传感器被触发后,控制器停止第二电机。
[0015]
进一步的,天然橡胶自动采收装置还包括第二弧形导轨,第二弧形导轨位于第一弧形导轨之上并且与第一弧形导轨上下对应,所述底板的底部安装有第一导轮和支撑轮,支撑轮抵在基础支架的表面,所述竖直导轨的顶部安装有顶板,顶板上安装有辅助齿轮和第二导轮;辅助齿轮与第二弧形导轨的内齿啮合;
[0016]
所述第一弧形导轨和第二弧形导轨均设置有弧形导槽,第一导轮位于第一弧形导轨的弧形导槽内,第二导轨位于第二弧形导轨的弧形导槽内;
[0017]
竖直导轨是一个较长的部件,第一弧形导轨和第二弧形导轨能够相对稳定竖直导轨的两端,避免竖直导轨偏斜;第一导轮和主动齿轮能够对底板进行限位,避免底板自转,第一导轮、主动齿轮和支撑轮则用于对底板进行三点支撑,保持底板始终水平;第二导轮和辅助齿轮的作用类似,能够对顶板进行限位。
[0018]
进一步的,所述控制器采集第一电机和第二电机的电流,当第一电机或第二电机的电流超过设定值后,控制器控制拉线电机通过牵拉线牵拉刀架;切割刀在橡胶树的表面切割时,有可能因为橡胶树部分结构导致切割刀被卡住,此时整个刀具无法移动,相应的,第一电机和第二电机由于负载急剧增大而导致电流急剧增加;为了克服切割刀被卡住的问题,拉线电机适当启动可以将刀架偏转一定的角度,使得切割刀适当抬起以越过障碍。
[0019]
进一步的,所述基础支架的底部设置有多个插针,插针能够插入泥土中,基础支架利用插针固定在橡胶树下;
[0020]
所述基础支架的底部设置有水平方向的安装板,安装板中设置有安装孔,、所述插针的顶部设置有螺纹,插针的顶部插入安装孔内并通过两个螺母固定,通过调整螺母即可调整整个插针的上下高度,进而调节整个基础支架的高度;所述插针的侧面设置有脚踏,工人下踩脚踏即可将插针插入泥土。
[0021]
有益效果:(1)本实用新型的天然橡胶自动采收装置在刀架两侧配置弹簧和拉线装置,通过拉线装置实现刀架偏转角度的精确控制,进而控制切割刀伸入树皮的深度,达到
满足橡胶收获同时又尽可能保护橡胶树的目的。(2)本实用新型的天然橡胶自动采收装置设置控制器采集第一电机和第二电机的电流,判断刀具的运行是否受阻,在刀具受阻的情况下自动控制拉线电机适当抬起切割刀,帮助整个刀具越过障碍,保证割胶动作的顺利完成。(3)本实用新型的天然橡胶自动采收装置在刀架两侧、第一弧形导轨两端以及竖直导轨两端均设置有限位传感器,精确控制整个刀具的位置,保障割胶的动作规范。(4)本实用新型的天然橡胶自动采收装置在基础支架的底部设置插针,使得整个采收装置能够固定在橡胶树下的泥土中,既能保障采收装置的稳定又能避免伤害橡胶树。
附图说明
[0022]
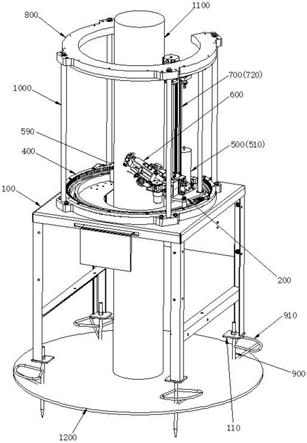
图1是实施例1天然橡胶自动采收装置的应用状态图。
[0023]
图2是实施例1天然橡胶自动采收装置中刀具的结构图。
[0024]
图3是实施例1天然橡胶自动采收装置中刀具和第一弧形导轨的结构图。
[0025]
图4是实施例1天然橡胶自动采收装置中竖直导轨和第二弧形导轨的结构图。
[0026]
图5是实施例1天然橡胶自动采收装置中刀具、第一驱动器和第二驱动器的结构图。
[0027]
其中:100、基础支架;110、安装板;200、底板;300、顶板;400、第一弧形导轨;500、第一驱动器;510、第一电机;520、传动齿轮组;530、主动齿轮;540、第一导轮;550、支撑轮;560、辅助齿轮;570、第二导轮;580、第三限位传感器;590、第四限位传感器;600、刀具;610、切割刀;620、刀架;630、固定板;640、弹簧;650、牵拉线;660、引导柱;670、拉线电机;680、线盘;690、第一限位传感器;611、第二限位传感器;700、第二驱动器;710、第二电机;720、竖直导轨;730、滑块;740、丝杠;750、第五限位传感器;760、第六限位传感器;800、第二弧形导轨;900、插针;910、脚踏;1000、连杆;1100、橡胶树;1200、泥土。
具体实施方式
[0028]
下面结合具体实施方式对本实用新型作进一步详细说明。
[0029]
实施例1
[0030]
如图1所示,本实施例的天然橡胶自动采收装置,包括基础支架100、底板200、顶板300、第一弧形导轨400、第一驱动器500、刀具600、第二驱动器700、控制器、第二弧形导轨800和插针900;
[0031]
第一弧形导轨400水平安装在基础支架100上,第一弧形导轨400应能够环抱橡胶树,第二弧形导轨800位于第一弧形导轨400之上并且与第一弧形导轨400上下对应,第一弧形导轨400和第二弧形导轨800通过多根连杆1000固定;
[0032]
如图2至5所示,刀具600包括切割刀610、刀架620、固定板630、弹簧640、牵拉线650、引导柱660、拉线电机670、线盘680、第一限位传感器690和第二限位传感器611,切割刀610和引导柱660均安装在刀架620上,引导柱660与切割刀610平行(具体如图3所示),刀架620与固定板630铰接,弹簧640和牵拉线650分别连接在刀架620两侧,拉线电机670驱动线盘680旋转,牵拉线650缠绕在线盘680上,拉线电机670通过牵拉线650能够驱动刀架620偏转,牵拉线650和弹簧640共同作用即可精确控制刀架620的偏转角度,刀架620的偏转角度能够控制切割刀610伸入橡胶树表皮的深度;固定板630上设置有第一限位传感器690和第
二限位传感器611,第一限位传感器690和第二限位传感器611分别位于刀架620的两侧;
[0033]
第一驱动器500包括第一电机510、传动齿轮组520、主动齿轮530、第一导轮540、支撑轮550、辅助齿轮560、第二导轮570、第三限位传感器580和第四限位传感器590;第三限位传感器580和第四限位传感器590分别位于第一弧形导轨400的两端;
[0034]
第二驱动器700包括第二电机710、竖直导轨720、滑块730、丝杠740、第五限位传感器750和第六限位传感器760;第五限位传感器750和第六限位传感器760分别位于竖直导轨720的两端;
[0035]
竖直导轨720的上下两端分别连接顶板300和底板200,第一电机510、传动齿轮组520和主动齿轮530均安装在底板200上,第一弧形导轨400上设置有内齿,主动齿轮530与内齿啮合,第一电机510通过传动齿轮组520驱动主动齿轮530旋转,进而使得底板200沿着第一弧形导轨400往复运动;底板200的底部安装有第一导轮540和支撑轮550,支撑轮550抵在基础支架100的表面,顶板300上安装有辅助齿轮560和第二导轮570;辅助齿轮560与第二弧形导轨800的内齿啮合;第一弧形导轨400和第二弧形导轨800均设置有弧形导槽,第一导轮540位于第一弧形导轨400的弧形导槽内,第二导轨位于第二弧形导轨800的弧形导槽内;
[0036]
第二电机710驱动丝杠740旋转,丝杠740与竖直导轨720平行,滑块730可滑动的安装在竖直导轨720上,滑块730上设置有螺纹孔,滑块730通过螺纹孔套在丝杠740上;所述固定板630安装在滑块730上,即整个刀具600与滑块730连接,当第二电机710驱动丝杠740旋转,滑块730将带动整个刀具600沿着竖直导轨720上下运动;
[0037]
基础支架100的底部设置有水平方向的安装板110,安装板110中设置有安装孔,插针900的顶部设置有螺纹,插针900的顶部插入安装孔内并通过两个螺母固定,通过调整螺母即可调整整个插针900的上下高度,进而调节整个基础支架100的高度;所述插针900的侧面设置有脚踏910,工人下踩脚踏910即可将插针900插入泥土1200;
[0038]
控制器能够控制拉线电机670、第一电机510和第二电机710,当第一限位传感器690或第二限位传感器611被触发后,控制器停止拉线电机670;当第三限位传感器580和第四限位传感器590被触发后,控制器停止第一电机510;当第五限位传感器750和第六限位传感器760被触发后,控制器停止第二电机710;控制器采集第一电机510和第二电机710的电流,当第一电机510或第二电机710的电流超过设定值后,控制器控制拉线电机670通过牵拉线650牵拉刀架620。
[0039]
如图1所示,本实施例的天然橡胶自动采收装置的工作流程是:
[0040]
(1)工人将整个装置以如图1所示的方式固定在橡胶树1100下,第一弧形导轨400和第二弧形导轨800环抱橡胶树1100,工人脚踩脚踏910将插针900插入泥土1200;
[0041]
(2)调节拉线电机670,使得如图2所示的切割刀610伸入树皮合适的深度;
[0042]
(3)第一电机510和第二电机710同时启动,水平弧形运动和上下运动相结合即可使得切割刀610形成螺旋形运动,最终在橡胶树1100的表面切割出螺旋形痕迹;
[0043]
(4)在切割过程中,如图3所示的引导柱660始终与树皮贴合,使得切割刀610能够随着树皮表面的起伏而产生同步的起伏;
[0044]
(5)如果在切割过程中遇到特殊情况,切割刀610可能受到阻滞,此时第一电机510和第二电机710由于负载急剧增大而导致电流急剧增加,控制器在检测到电流增大后控制拉线电机670适当启动将刀架620偏转一定的角度,使得切割刀610适当抬起以越过障碍。
[0045]
虽然说明书中对本实用新型的实施方式进行了说明,但这些实施方式只是作为提示,不应限定本实用新型的保护范围。在不脱离本实用新型宗旨的范围内进行各种省略、置换和变更均应包含在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1