一种昆虫养殖的智能化立体生产系统
1.本实用新型涉及物联网和人工智能技术领域,尤其是一种昆虫养殖的智能化立体生产系统。
背景技术:
2.现代昆虫养殖主要关注于农业养殖技术本身,大量依靠人力进行环境管理、投喂饲料、生长监测,且需要依靠养殖人员的丰富经验,工作辛苦,养殖难度大,利润率不高。现在也有一些针对昆虫养殖的装置实用新型,但不是基于传统的平面养殖结构,就是针对于养殖中的某个环节进行改进,还有的就是没有充分利用现在先进的物联网和人工智能技术,均无法实现昆虫养殖过程的标准化、专业化和无人化,也就无法实现大规模的养殖生产,阻碍昆虫产品的应用和推广。
技术实现要素:
3.本实用新型人针对上述问题及技术需求,提出了一种昆虫养殖的智能化立体生产系统,利用管理服务器和养殖箱自动化流水线系统将养殖箱定时传送进行视频检测、称重和投喂饲料,利用立体放置架进行养殖箱的立体管理堆放,利用管理服务器内置的机器视觉技术进行昆虫的生长监测,利用物联网感知技术进行环境参数反馈调节,将养殖专业和科技手段结合,实现昆虫养殖过程的标准化、专业化、无人化。
4.本实用新型的技术方案如下:
5.一种昆虫养殖的智能化立体生产系统,包括管理服务器、养殖箱自动化流水线系统、设置在养殖区内的若干个立体放置架、环境控制装置和环境监测传感器系统、以及置于立体放置架内的若干个养殖箱;
6.养殖箱自动化流水线系统包括环形皮带传送装置、置于环形皮带传送装置的皮带下方的称重装置、置于环形皮带传送装置上方的摄像头和自动投喂器,环形皮带传送装置通过对接模组与立体放置架连接;
7.管理服务器分别连接环境控制装置、环境监测传感器系统、称重装置、摄像头、自动投喂器、对接模组和传送带电机;传送带电机连接控制环形皮带传送装置和对接模组的皮带动作;管理服务器通过内置的环境反馈调整算法分析由环境监测传感器系统采集的环境信息控制环境控制装置;管理服务器通过内置的机器视觉算法分析由摄像头采集的养殖箱内昆虫图像获取昆虫状态,昆虫状态包括昆虫的大小、活性和脱皮程度;管理服务器通过内置的饲料投喂优化算法分析昆虫状态和由称重装置采集的昆虫质量获取最优投喂量,自动投喂器根据最优投喂量向养殖箱投放饲料;管理服务器通过内置的养殖箱位置优化算法分析昆虫状态和环境信息获取立体放置架的最优位置;
8.放置在立体放置架上的养殖箱通过对接模组传输至环形皮带传送装置上进行流水作业,依次通过摄像头、称重装置和自动投喂器后,通过管理服务器指定的对接模组传回至立体放置架的最优位置。
9.其进一步的技术方案为,对接模组包括第一对接轨道、第二对接轨道、堆垛机和设置在第二对接轨道前的二维码扫描器,堆垛机和二维码扫描器分别连接管理服务器;在养殖区内,每两个立体放置架背对背放置作为一组立体放置架,每组立体放置架之间设置一个第一对接轨道作为每组立体放置架的共用出入口,在第一组立体放置架和最后一组立体放置架的对面还分别设有一个立体放置架并且正面相对,分别在一个立体放置架与第一组立体放置架和最后一组立体放置架之间设置第一对接轨道;堆垛机在第一对接轨道上移动,第二对接轨道作为环形皮带传送装置的岔口通道与对应的第一对接轨道对接,放置在立体放置架上的养殖箱通过堆垛机和第一对接轨道传送至对应的第二对接轨道上进入环形皮带传送装置上进行流水作业。
10.其进一步的技术方案为,每个养殖箱上均设有对应的二维码,每个二维码对应一个养殖箱编号,当养殖箱在养殖箱自动化流水线系统中进行流水作业时,摄像头通过采集养殖箱的二维码并传送至管理服务器,管理服务器根据获取的养殖箱编号对应记录养殖箱的昆虫状态和环境信息;在确定好养殖箱放置在立体放置架的最优位置后,管理服务器下发最优位置指令给二维码扫描器和堆垛机,二维码扫描器顺序扫描养殖箱的二维码并判断养殖箱是否通过当前岔口通道,第二对接轨道上设有闸门,若通过则打开闸门并通过堆垛机将养殖箱传送至最优位置,若不通过则关闭闸门,养殖箱通过环形皮带传送装置传送至下一二维码扫描器进行扫描和判断直至到达最优位置对应的岔口通道。
11.其进一步的技术方案为,堆垛机包括垂直升降轨道和第一滚动皮带,立体放置架的每一格上均设有第二滚动皮带,堆垛机根据最优位置指令通过第一对接轨道移动至立体放置架的相应水平位置,然后通过垂直升降轨道移动至立体放置架的相应竖直位置后,传送带电机控制第一滚动皮带的转向将养殖箱传送至立体放置架的最优位置;当准备开始流水作业,养殖箱出库过程中,养殖箱通过第二滚动皮带传送至堆垛机上,通过垂直升降轨道、第一对接轨道和第一滚动皮带传送至对应的第二对接轨道上,打开闸门后进入环形皮带传送装置上进行流水作业。
12.其进一步的技术方案为,殖箱底部设有网孔结构,堆垛机还包括振动电机和收集箱,在养殖箱出库过程中,堆垛机开启振动电机,养殖箱内的昆虫粪便和残余饲料作为肥料通过网孔结构掉落在收集箱内,养殖箱出库后箱内只保留昆虫。
13.其进一步的技术方案为,环境控制装置包括空调、排风扇、加湿器和自动窗帘;环境监测传感器系统通过无线网关连接管理服务器,无线网关设置在养殖区内,环境监测传感器系统分别设置在立体放置架的每一格上,用于采集立体放置架每一格的环境信息,环境监测传感器系统包括温湿度传感器、光照传感器、氧气传感器、有害气体传感器和声音传感器。
14.本实用新型的有益技术效果是:
15.本申请利用管理服务器将放置在立体放置架内的养殖箱定时传送到养殖箱自动化流水线系统进行视频检测、称重和投喂饲料后,再通过管理服务器指定的对接模组传回至立体放置架的最优位置,利用立体放置架和对接模组实现了养殖箱的立体管理堆放,利用管理服务器内置的机器视觉算法自动进行昆虫状态的生长监测,利用管理服务器内置的环境反馈调整算法控制环境控制装置的环境参数反馈调节,利用管理服务器内置的饲料投喂优化算法获取昆虫各生长阶段的最优投喂量,利用管理服务器内置的养殖箱位置优化算
法确定立体放置架的最优位置;本申请将养殖专业和科技手段结合,配合实时环境指标,进行精准化饲料投喂,无需人为干预,形成完整的养殖闭环系统,针对昆虫养殖过程中的所有环节进行改进,形成体系化的智能化立体生产系统,实现养殖过程的标准化、专业化和无人化,帮助实现大规模的养殖生产,助力昆虫产品的应用和推广。
附图说明
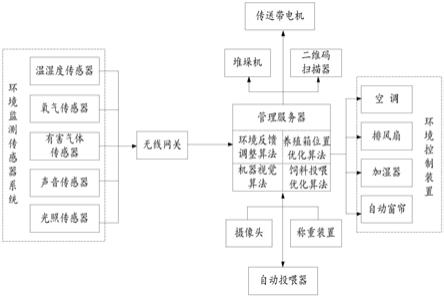
16.图1是本申请提供的智能化立体生产系统的原理框图。
17.图2是本申请提供的养殖箱自动化流水线系统的结构示意图。
18.图3是本申请提供的立体放置架的结构示意图。
19.图4是本申请提供的基于智能化立体生产系统的养殖方法流程图。
20.图5是本申请提供的养殖箱位置优化算法的流程图。
21.图6是本申请提供的环境反馈调整算法的流程图。
具体实施方式
22.下面结合附图对本实用新型的具体实施方式做进一步说明。
23.本申请公开了一种昆虫养殖的智能化立体生产系统,结合图1
‑
图3所示,智能化立体生产系统包括管理服务器、养殖箱自动化流水线系统、设置在养殖区内的若干个立体放置架1、环境控制装置和环境监测传感器系统2、以及置于立体放置架1内的若干个养殖箱3。每个养殖箱3上均设有对应的二维码,每个二维码对应一个养殖箱编号,养殖箱底部设有网孔结构。
24.如图2所示,养殖箱自动化流水线系统包括环形皮带传送装置4、置于环形皮带传送装置4的皮带下方的称重装置5、置于环形皮带传送装置上方的摄像头6和自动投喂器7,环形皮带传送装置4通过对接模组与立体放置架1连接。
25.对接模组包括第一对接轨道8、第二对接轨道9、堆垛机10和设置在第二对接轨道9前的二维码扫描器11,堆垛机10和二维码扫描器11分别连接管理服务器。堆垛机10包括垂直升降轨道101、第一滚动皮带、振动电机和收集箱,立体放置架1的每一格上均设有第二滚动皮带,第二对接轨道9上设有闸门 901。如图3所示,在养殖区内,每两个立体放置架1背对背放置作为一组立体放置架,每组立体放置架之间设置一个第一对接轨道8作为每组立体放置架的共用出入口,在第一组立体放置架和最后一组立体放置架的对面还分别设有一个立体放置架并且正面相对,分别在一个立体放置架与第一组立体放置架和最后一组立体放置架之间设置一个第一对接轨道8。堆垛机10在第一对接轨道8 上移动,第二对接轨道9作为环形皮带传送装置4的岔口通道与对应的第一对接轨道8对接。本申请利用立体放置架和对接模组实现了养殖箱的立体管理堆放,通过将每两个立体放置架设为一组背对背放置,全面利用了养殖空间并且节约了成本。
26.如图1所示,管理服务器分别连接环境控制装置、环境监测传感器系统2、称重装置5、摄像头6、自动投喂器7、对接模组和传送带电机。环境控制装置包括空调、排风扇、加湿器和自动窗帘。环境监测传感器系统2通过无线网关 12连接管理服务器,无线网关12设置在养殖区内,无线网关12与管理服务器采用wifi/zigbee/蓝牙/lora等技术无线连接,环境监测传感器系统2分别设置在立体放置架1的每一格上,用于采集立体放置架每一格的环境信
息,环境监测传感器系统2包括温湿度传感器、光照传感器、氧气传感器、有害气体传感器和声音传感器。其中各个传感器均采用现有传感器,因此本申请不详细介绍各个传感器的内置电路结构。传送带电机连接控制环形皮带传送装置4和对接模组的皮带动作(也即第一滚动皮带和第二滚动皮带)。管理服务器通过内置的环境反馈调整算法分析由环境监测传感器系统2采集的环境信息用以控制环境控制装置。管理服务器通过内置的机器视觉算法分析由摄像头6采集的养殖箱内昆虫图像获取昆虫状态,昆虫状态包括昆虫的大小、活性和脱皮程度,具体的,机器视觉算法包括边缘检测、运动检测和颜色检测,通过边缘检测获取昆虫的大小,通过运动检测获取昆虫的活性,通过颜色检测获取昆虫的脱皮程度。管理服务器通过内置的饲料投喂优化算法分析昆虫状态和由称重装置5采集的昆虫质量获取最优投喂量,自动投喂器7根据最优投喂量向养殖箱3投放饲料。管理服务器通过内置的养殖箱位置优化算法分析昆虫状态和环境信息获取立体放置架的最优位置。
27.放置在立体放置架1上的养殖箱3通过对接模组传输至环形皮带传送装置 4上进行流水作业,依次通过摄像头6、称重装置5和自动投喂器7后,通过管理服务器指定的对接模组传回至立体放置架的最优位置。
28.本申请还公开了一种使用上述昆虫养殖的智能化立体生产系统的养殖方法,如图4所示,该养殖方法包括如下步骤:
29.步骤1:将一批次昆虫幼虫等质量放置在各个养殖箱3内,将养殖箱3放置在立体放置架1上。
30.通过称重装置5获取各个养殖箱内的昆虫初始质量后,对应记录在管理服务器内的各个养殖箱编号中,将养殖箱3通过环形皮带传送装置4和对接模组顺序放置在立体放置架1上。
31.步骤2:根据昆虫生长习性,管理服务器定时通过对接模组取出需要投喂的养殖箱并传输至环形皮带传送装置4上进行流水作业。
32.具体地,当准备开始流水作业,养殖箱出库过程中:放置在立体放置架1 上的养殖箱3通过第二滚动皮带传送至堆垛机10上,通过垂直升降轨道101、第一对接轨道8和第一滚动皮带传送至对应的第二对接轨道9上,打开闸门901 后进入环形皮带传送装置4上进行流水作业,同时堆垛机10开启振动电机,养殖箱3内的昆虫粪便和残余饲料作为肥料通过网孔结构掉落在收集箱内,当收集满后可以进行向外销售或内部自用,养殖箱3出库后箱内只保留昆虫。
33.步骤3:当养殖箱3到达摄像头6下方时,环形皮带传送装置4暂停,管理服务器通过内置的机器视觉算法分析由摄像头6采集的养殖箱内昆虫图像获取昆虫状态,同时通过摄像头6采集的二维码确定养殖箱编号,并记录在管理服务器中,环形皮带传送装置4继续传动。
34.当养殖箱在养殖箱自动化流水线系统中进行流水作业时,摄像头6通过采集养殖箱的二维码并传送至管理服务器,管理服务器根据获取的养殖箱编号对应记录养殖箱的昆虫状态和环境信息。
35.步骤4:当养殖箱3到达称重装置5时,环形皮带传送装置4暂停,称重装置5将采集的当前昆虫质量发送至管理服务器,管理服务器将当前昆虫质量与上一轮昆虫质量进行比较,获取昆虫生长情况并记录在对应的养殖箱编号中,环形皮带传送装置4继续传动。
36.步骤5:当养殖箱3到达自动投喂器7下方时,环形皮带传送装置4暂停,管理服务器通过内置的饲料投喂优化算法分析昆虫状态和昆虫生长情况获取最优投喂量,自动投喂器7根据最优投喂量向养殖箱3投放饲料,并将本次最优投喂量记录在对应的养殖箱编号中,环形皮带传送装置4继续传动。
37.首先通过昆虫状态区分昆虫处于幼虫或者成虫阶段。若昆虫处于幼虫阶段,则通过y=n
×
m获取最优投喂量,保障幼虫快速成长,其中,y为最优投喂量, n为当前昆虫种类的养殖系数,m为当前昆虫质量。若昆虫处于成虫阶段,则通过y=a
×
m
‑
b获取最优投喂量,逐渐降低饲料量,其中,a和b为当前昆虫种类的养殖系数,具体的,养殖系数是由不同昆虫的养殖技术决定的,不同昆虫成虫和幼虫的养殖系数也不相同。当昆虫成虫生长满足m=b/a时,自动投喂器7 停止投喂,并通过管理服务器提醒收获满足出厂要求的成虫。
38.步骤6:管理服务器通过内置的养殖箱位置优化算法分析昆虫状态和由环境监测传感器系统采集的环境信息获取立体放置架的最优位置,养殖箱3通过管理服务器指定的对接模组传回至立体放置架的最优位置。
39.步骤601:如图5所示,根据昆虫养殖技术,确定昆虫在生长阶段的最优环境参数分别为温度t
q
、湿度h
q
、光照度l
q
、氧气浓度o
q
和有害气体浓度g
q
。
40.步骤602:初始化参量权重且平均分配,包括设置:步骤602:初始化参量权重且平均分配,包括设置:
41.步骤603:出库前养殖箱在立体放置架对应的格子中的实测环境参数分别为温度t
n
、湿度h
n
、光照度l
n
、氧气浓度o
n
和有害气体浓度g
n
。
42.步骤604:通过 variety
n
=c
×
(t
q
‑
t
n
)+d
×
(h
q
‑
h
n
)+e
×
(l
q
‑
l
n
)+f
×
(o
q
‑
o
n
)+g
×
(g
q
‑
g
n
) 计算立体放置架中每个格子的环境质量偏差度,其中,variety
n
为环境质量偏差度,c、d、e、f、g均为参量权重。
43.步骤605:养殖箱3入库时放置在立体放置架1中环境质量偏差度最小的空余格子中。
44.养殖箱入库时:在确定好养殖箱放置在立体放置架的最优位置后,管理服务器下发最优位置指令给二维码扫描器11和堆垛机10,二维码扫描器11顺序扫描养殖箱3的二维码并判断养殖箱3是否通过当前岔口通道,若通过则打开闸门901,堆垛机10根据最优位置指令通过第一对接轨道8移动至立体放置架 1的相应水平位置,然后通过垂直升降轨道101移动至立体放置架1的相应竖直位置后,传送带电机控制第一滚动皮带的转向将养殖箱3传送至立体放置架 1的最优位置(也即环境质量偏差度最小的空余格子内)。若不通过则关闭闸门 901,养殖箱3通过环形皮带传送装置4传送至下一二维码扫描器11处进行扫描和判断直至到达最优位置对应的岔口通道。步骤601
‑
605基于贪心算法并实现了优化养殖箱在立体放置架空余格子的位置分配。
45.步骤606:当所有养殖箱3均经过了一轮出入库后,采用线性规划算法优化调整参量权重,优化函数为且满足约束条件
求解出优化函数f最小值时的各个参量权重,为下一轮立体放置架1的最优位置更新每个格子的环境质量偏差度,当下一轮养殖箱入库开始时,重新执行出库前养殖箱在立体放置架对应的格子中的实测环境参数分别为温度t
n
、湿度h
n
、光照度l
n
、氧气浓度o
n
和有害气体浓度g
n
的步骤,也即步骤603。
46.步骤7:管理服务器通过内置的环境反馈调整算法分析环境信息并控制环境控制装置满足昆虫生长环境的平均要求,控制的目标是使得立体放置架1所有格子的各个环境参数与养殖箱3对应的所需最优环境参数的方差值之和最小。
47.环境反馈调整算法基于pid控制算法,其流程图如图6所示,以温度反馈调整为例,其它环境参数的反馈调整均与温度反馈调整一致。假设温度传感器采样间隔时间为t,监测第n个格子在kt时刻实际的环境参数为温度t
n
(k),每个格子上养殖箱所需的优化温度值为则方差为方差为零是最理想的情况,采用增量式pid控制算法的目的是使得方差趋近于零,计算出环境调整增量值为
48.δu(k)=k
p
[v(k)
‑
v(k
‑
1)]+k
i
v(k)+k
d
[v(k)
‑
2v(k
‑
1)+v(k
‑
2)],其中k
p
是比例系数,k
i
是积分系数,k
d
是微分系数,按照经验值k
p
=0.5,k
i
=0.2,k
d
=0.1,则空调每次调整的温度值为定时重复执行监测第n个格子在kt 时刻实际的环境参数为温度t
n
(k)的步骤。
[0049]
步骤8:重新执行管理服务器定时通过对接模组取出需要投喂的养殖箱并传输至环形皮带传送装置4上进行流水作业的步骤,直至一批次昆虫幼虫生长为满足出厂要求的成虫。
[0050]
本申请将养殖专业和科技手段结合,配合实时环境指标,进行精准化饲料投喂,无需人为干预,形成完整的养殖闭环系统,针对昆虫养殖过程中的所有环节进行改进,形成体系化的智能化立体生产系统,实现养殖过程的标准化、专业化和无人化,帮助实现大规模的养殖生产,助力昆虫产品的应用和推广。
[0051]
以上所述的仅是本申请的优选实施方式,本实用新型不限于以上实施例。可以理解,本领域技术人员在不脱离本实用新型的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1