一种分布喂入式马铃薯排种装置自适应测控方法及系统与流程
1.本发明涉及农业测控技术,特别是一种分布喂入式马铃薯排种装置自适应测控方法及系统。
背景技术:
2.马铃薯粮菜兼用,营养丰富,种植广泛。马铃薯“主粮化”政策有助于保障国家粮食安全,推动现代农业的发展。马铃薯播种机是马铃薯产业发展的关键机器,其播种质量直接关系到马铃薯的生长发育和产量,而排种装置对马铃薯播种质量起着至关重要的作用。
3.目前勺式排种器应用最为广泛,取种勺通过勺柄连接在输送链或输送带上,具有造价低、不伤种、株距可调等优点,但具有一定局限性,若种箱内的种薯数量较多,种薯间压实作用大,不利于取种;反之种薯数量有限,则种薯与取种勺接触机会较少,亦不利于取种,容易产生漏种现象,影响排种性能。因此,如何根据排种频率实时调节供种量,保证供种稳定和高效排种是马铃薯排种技术亟待解决的问题。
技术实现要素:
4.本发明所要解决的技术问题是针对现有技术的上述问题,提供一种分布喂入式马铃薯排种装置自适应测控方法及系统。
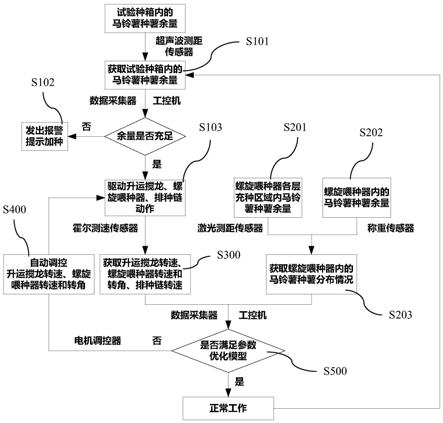
5.为了实现上述目的,本发明提供了一种分布喂入式马铃薯排种装置自适应测控方法,其中,包括如下步骤:
6.s100、判断试验种箱内的种薯余量并获得种薯余量数据;
7.s200、检测螺旋喂种器内的种薯分布情况并获得种薯分布数据;
8.s300、获取升运搅龙转速、排种链转速和螺旋喂种器转速及转角的运动参数数据;以及
9.s400、基于分布喂入式马铃薯排种装置参数优化数学模型,根据所述种薯余量数据、种薯分布数据和运动参数数据,向工控机发送指令,自动调控所述升运搅龙转速、螺旋喂种器转速及转角到设定工作参数组合。
10.上述的分布喂入式马铃薯排种装置自适应测控方法,其中,步骤s100采用超声波测距判断所述试验种箱内的种薯余量,进一步包括:
11.s101、将超声波测距传感器设置在安装距离为距所述试验种箱底部x处,并进行超声波测距获取试验种箱内的种薯余量;
12.s102、若所述超声波测距的距离大于临界测距反应距离x时,则判断所述试验种箱内的种薯余量不足,工控机发出加种报警提示,以保证稳定供种;以及
13.s103、若所述试验种箱内的种薯余量充足,则驱动升运搅龙、螺旋喂种器和排种链工作。
14.上述的分布喂入式马铃薯排种装置自适应测控方法,其中,所述安装距离x为:
[0015][0016]
其中,q为搅龙输送能力,单位为kg/s,t为种薯补种的时间,单位为s,s为试验种箱横截面面积,单位为m2,λ为填充系数,ρ为种薯密度,单位为kg/m3,x为临界测距反应距离,单位为m。
[0017]
上述的分布喂入式马铃薯排种装置自适应测控方法,其中,步骤s200采用阵列激光测距与称重相结合检测所述螺旋喂种器内的种薯分布情况,进一步包括:
[0018]
s201、采用激光非接触式测距,根据所述螺旋喂种器每层充种区域的激光信号反射强度,获得所述螺旋喂种器每层充种区域内的种薯余量;
[0019]
s202、通过称重检测所述螺旋喂种器的重力变化,求得所述螺旋喂种器内的实时种薯余量;以及
[0020]
s203、根据所述螺旋喂种器每层充种区域内的种薯余量和所述螺旋喂种器内的种薯余量,得到所述螺旋喂种器内的种薯分布情况。
[0021]
上述的分布喂入式马铃薯排种装置自适应测控方法,其中,步骤s300中采用霍尔测速传感器获取所述升运搅龙转速、排种链转速和螺旋喂种器转速及转角,其中,所述升运搅龙转速、螺旋喂种器转速及排种链转速为:
[0022]
单位为r/min;
[0023]
所述螺旋喂种器转角为:
[0024]
单位为rad;
[0025]
其中,t1和t2分别为霍尔测速传感器测量的两个时间点,l1和l2分别为同一被测物体对应时间t1和t2的移动距离。
[0026]
上述的分布喂入式马铃薯排种装置自适应测控方法,其中,步骤s400进一步包括:
[0027]
s401、根据所述种薯余量数据,确定各工作部件对应的电机是否正常动作;
[0028]
s402、根据所述种薯分布数据,确定所述升运搅龙转速和螺旋喂种器转速及转角;以及
[0029]
s403、所述霍尔测速传感器实时检测所述排种链转速,结合所述种薯余量数据、所述种薯分布数据、所述升运搅龙转速和螺旋喂种器转速及转角,实时匹配所述排种链转速。
[0030]
上述的分布喂入式马铃薯排种装置自适应测控方法,其中,还包括如下步骤:
[0031]
s500、判断是否满足参数优化模型,若是,则控制分布喂入式马铃薯排种装置正常工作,且循环步骤s100
‑
s400;若否,则回到步骤s400重新自动调控所述升运搅龙转速、螺旋喂种器转速及转角到设定工作参数组合,以保证持续稳定供种和高效排种,提升播种效率和种植精度。
[0032]
为了更好地实现上述目的,本发明还提供了一种分布喂入式马铃薯排种装置自适应测控系统,设置在分布喂入式马铃薯排种装置上,其中,包括:
[0033]
超声波测距传感器,水平放置并设置于距离所述分布喂入式马铃薯排种装置试验种箱底部安装距离为x处,用于判断所述试验种箱内的种薯余量;
[0034]
多个霍尔测速传感器,分别设置于所述分布喂入式马铃薯排种装置的升运搅龙转轴、排种链转轴和螺旋喂种器外筒上,用于获取升运搅龙转速、排种链转速和螺旋喂种器转速及转角;
[0035]
称重传感器,安装在所述分布喂入式马铃薯排种装置的螺旋喂种器底端,用于检测螺旋喂种器内的种薯余量;
[0036]
多个激光测距传感器,分别对应所述螺旋喂种器内各层充种区域设置,用于检测所述螺旋喂种器内每层充种区域内的种薯余量;
[0037]
电机调控器,分别与所述分布喂入式马铃薯排种装置的升运搅龙驱动电机、螺旋喂种器驱动电机连接,用于控制所述升运搅龙转速和螺旋喂种器转速及转角;
[0038]
数据采集器,分别与所述超声波测距传感器、称重传感器、激光测距传感器和霍尔测速传感器连接,用于采集所述超声波测距传感器、称重传感器、激光测距传感器和霍尔测速传感器的脉冲信号;以及
[0039]
工控机,分别与所述电机调控器和数据采集器连接,用于接收所述脉冲信号后进行数据处理,若所述试验种箱内的种薯余量充足,则发送指令自动调控所述升运搅龙转速和螺旋喂种器转速及转角到设定工作参数组合。
[0040]
上述的分布喂入式马铃薯排种装置自适应测控系统,其中,还包括报警器,用于所述试验种箱内的种薯余量不足时发出加种报警。
[0041]
上述的分布喂入式马铃薯排种装置自适应测控系统,其中,所述安装距离x为:
[0042][0043]
其中,q为搅龙输送能力,单位为kg/s,t为种薯补种的时间,单位为s,s为试验种箱横截面面积,单位为m2,λ为填充系数,ρ为种薯密度,单位为kg/m3,x为临界测距反应距离,单位为m。
[0044]
本发明的技术效果在于:
[0045]
本发明解决了现有技术中分布喂入式马铃薯排种装置存在的自动化程度低、供种与排种频率难匹配等问题,实现了螺旋喂种器内的种薯分布情况和试验种箱内种薯余量检测等关键工作参数检测和控制,并自动调控升运搅龙转速、螺旋喂种器转速和转角到最优工作参数组合,提高了分布喂入式马铃薯排种装置自动化程度水平,保证了持续稳定供种和高效排种,提升了播种效率和种植精度。
[0046]
以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
[0047]
图1为本发明一实施例的分布喂入式马铃薯排种装置自适应测控方法流程图;
[0048]
图2为本发明一实施例的分布喂入式马铃薯排种装置结构示意图;
[0049]
图3为本发明一实施例的勺式排种机构结构示意图;
[0050]
图4为本发明一实施例的分布喂入式马铃薯排种装置自适应测控系统工作原理图。
[0051]
其中,附图标记
[0052]
1 霍尔测速传感器
[0053]
2 称重传感器
[0054]
3 激光测距传感器
[0055]
4 超声波测距传感器
[0056]
5 数据采集器
[0057]
6 工控机
[0058]
7 电机调控器
[0059]
8 升运搅龙驱动电机
[0060]
9 螺旋喂种器驱动电机
[0061]
10 试验种箱
[0062]
11 升运搅龙机构
[0063]
12 勺式排种机构
[0064]
121 取种勺
[0065]
122 排种链
[0066]
123 下种管道
[0067]
124 螺旋喂种器
[0068]
125 排种链轮
[0069]
13 传动装置
[0070]
14 自适应测控系统
[0071]
15 机架
[0072]
16 报警器
具体实施方式
[0073]
下面结合附图对本发明的结构原理和工作原理作具体的描述:
[0074]
参见图1,图1为本发明一实施例的分布喂入式马铃薯排种装置自适应测控方法流程图。本发明的分布喂入式马铃薯排种装置自适应测控方法,适用于分布喂入式马铃薯排种装置,该分布喂入式马铃薯排种装置包括机架15和安装在所述机架15上的试验种箱10、升运搅龙机构11和勺式排种机构12,其中升运搅龙机构11分别连接试验种箱10和勺式排种机构12,该勺式排种机构12包括螺旋喂种器124、排种链122和下种管道123,排种链122上均布有多个取种勺121,排种链122张紧在排种链轮125上,传动装置13分别与升运搅龙机构11和勺式排种机构12连接,排种链122分别穿过所述下种管道123和所述螺旋喂种器124,以实现种薯的单粒分离,完成充种和排种工作。
[0075]
该分布喂入式马铃薯排种装置自适应测控方法包括如下步骤:
[0076]
步骤s100、判断试验种箱10内的种薯余量并获得种薯余量数据;
[0077]
步骤s200、检测螺旋喂种器124内的种薯分布情况并获得种薯分布数据;
[0078]
步骤s300、获取升运搅龙转速、排种链转速和螺旋喂种器转速及转角的运动参数数据;以及
[0079]
步骤s400、优化排种装置工作参数,基于分布喂入式马铃薯排种装置参数优化数学模型,根据所述种薯余量数据、种薯分布数据和运动参数数据,向工控机6发送指令,自动调控所述升运搅龙转速、螺旋喂种器转速及转角到设定的最佳工作参数组合。
[0080]
还包括如下步骤:
[0081]
步骤s500、判断是否满足参数优化模型,若是,则控制分布喂入式马铃薯排种装置正常工作,且循环步骤s100
‑
s400;若否,则回到步骤s400重新自动调控所述升运搅龙转速、螺旋喂种器转速及转角到设定的最佳工作参数组合。可提高分布喂入式马铃薯排种装置的自动化水平,以保证持续稳定供种和高效排种,提升播种效率和种植精度。
[0082]
其中,步骤s100优选采用超声波测距判断所述试验种箱10内的种薯余量,进一步包括:
[0083]
步骤s101、将超声波测距传感器4设置在安装距离为距所述试验种箱10底部xm处,并进行超声波测距获取试验种箱10内的种薯余量;
[0084]
步骤s102、若所述超声波测距的距离大于临界测距反应距离x时,则判断所述试验种箱10内的种薯余量不足,工控机6发出加种报警提示,提示需加种,以保证稳定供种;以及
[0085]
步骤s103、若所述试验种箱10内的种薯余量充足,则驱动升运搅龙机构11、螺旋喂种器124和排种链122工作。
[0086]
其中,安装距离x取决于搅龙输送能力、补种时间及临界测距反应距离,所述安装距离x为:
[0087][0088]
其中,q为搅龙输送能力,单位为kg/s,t为种薯补种的时间,单位为s,s为试验种箱10横截面面积,单位为m2,λ为填充系数,ρ为种薯密度,单位为kg/m3,x为临界测距反应距离,单位为m。
[0089]
本实施例的步骤s200优选采用阵列激光测距与称重相结合的方法检测所述螺旋喂种器124内的种薯分布情况,进一步包括:
[0090]
步骤s201、采用激光非接触式测距的方法,根据所述螺旋喂种器124各层充种区域的激光信号反射强度,检测获得所述螺旋喂种器124各层充种区域内的种薯余量;
[0091]
步骤s202、通过称重的方法,根据输送信号的变化可以检测所述螺旋喂种器124的重力变化,求得所述螺旋喂种器124内的实时种薯余量;以及
[0092]
步骤s203、结合步骤s201和s202获取信息,根据所述螺旋喂种器124每层充种区域内的种薯余量和所述螺旋喂种器124内的种薯余量,得到所述螺旋喂种器124内的种薯分布情况。
[0093]
本实施例的步骤s300中采用霍尔测速传感器1获取所述升运搅龙转速、排种链转速和螺旋喂种器转速及转角信息,包括:
[0094]
步骤s301、通过在两个时间的信号对比,两个时间点分别记为t1和t2,标注同一个点,分辨被测物体移动的距离,分别记为l1和l2;
[0095]
步骤s302、根据步骤s301的信息,则所述升运搅龙转速、螺旋喂种器转速及排种链转速为:
[0096]
单位为r/min;
[0097]
所述螺旋喂种器124转角为:
[0098]
单位为rad;
[0099]
其中,t1和t2分别为霍尔测速传感器1测量的两个时间点,l1和l2分别为同一被测物体对应时间t1和t2的移动距离。
[0100]
步骤s400进一步包括:
[0101]
步骤s401、根据步骤s100判断试验种箱10内的所述种薯余量数据,确定各工作部件对应的电机是否正常动作;
[0102]
步骤s402、根据步骤s200检测螺旋喂种器124内的所述种薯分布数据,确定所述升运搅龙转速和螺旋喂种器转速及转角;以及
[0103]
步骤s403、根据所述霍尔测速传感器1实时检测所述排种链转速信息,结合步骤s401和s402的所述种薯余量数据、所述种薯分布数据、所述升运搅龙转速和螺旋喂种器转速及转角,实时匹配所述排种链转速,保证高效取种。
[0104]
参见图2
‑
图4,图2为本发明一实施例的分布喂入式马铃薯排种装置结构示意图,图3为本发明一实施例的勺式排种机构12结构示意图,图4为本发明一实施例的分布喂入式马铃薯排种装置自适应测控系统14工作原理图。本发明还提供了一种适用上述方法的分布喂入式马铃薯排种装置自适应测控系统14,设置在分布喂入式马铃薯排种装置上,包括:超声波测距传感器4,通过安装支架水平放置并用螺栓固定设置于距离所述分布喂入式马铃薯排种装置试验种箱10底部安装距离为x米处,用于判断所述试验种箱10内的种薯余量;多个霍尔测速传感器1,分别设置安装于所述分布喂入式马铃薯排种装置的升运搅龙转轴、排种链转轴和螺旋喂种器124的外筒上,用于获取升运搅龙转速、排种链转速和螺旋喂种器转速及转角;称重传感器2,安装在所述分布喂入式马铃薯排种装置的螺旋喂种器124底端,用于检测螺旋喂种器124内的种薯余量;多个激光测距传感器3,分别对应所述螺旋喂种器124内各层充种区域设置,优选安装在距离螺旋喂种器124内各层充种区域顶端y米处,由激光测距传感器精度决定,用于检测所述螺旋喂种器124内每层充种区域内的种薯余量;电机调控器7,分别与所述分布喂入式马铃薯排种装置的升运搅龙驱动电机8、螺旋喂种器驱动电机9连接,用于控制所述升运搅龙转速和螺旋喂种器转速及转角;数据采集器5,分别与所述超声波测距传感器4、称重传感器2、多个激光测距传感器3和多个霍尔测速传感器1连接,用于采集所述超声波测距传感器4、称重传感器2、激光测距传感器3和霍尔测速传感器1的脉冲信号;以及工控机6,分别与所述电机调控器7和数据采集器5连接,用于接收所述脉冲信号后进行数据处理并发送指令,若所述试验种箱10内的种薯余量充足,则发送指令自动调控所述升运搅龙转速和螺旋喂种器转速及转角到设定的最优工作参数组合。否则,工控机6及时发出报警,还可包括报警器16,用于所述试验种箱10内的种薯余量不足时发出加种报警,提示需加种。
[0105]
其中,所述安装距离x为:
[0106][0107]
其中,q为搅龙输送能力,单位为kg/s,t为种薯补种的时间,单位为s,s为试验种箱10横截面面积,单位为m2,λ为填充系数,ρ为种薯密度,单位为kg/m3,x为临界测距反应距离,单位为m。
[0108]
工作时,通过采用超声波测距方式判断试验种箱10内的种薯余量,若试验种箱10内的种薯余量充足,向工控机6发送指令,各工作部件相应电机正常动作,否则工控机6及时发出报警,提示需加种。通过阵列激光非接触式测距的方法,按照螺旋喂种器124各层充种区域影响激光信号反射强度,进而检测螺旋喂种器124各层充种区域种薯余量;通过称重的方法,根据输送信号的变化可以求得螺旋喂种器124的重力变化,进而可实时检测螺旋喂种器124内的种薯余量,基于此可获取螺旋喂种器124内的种薯分布情况。通过采用霍尔测速传感器1获取升运搅龙转速、螺旋喂种器转速及转角和排种链转速信息。优化勺式排种机构12的工作参数,通过数据采集器5接收多个传感器的脉冲信号,进行数据处理,并向工控机6发送指令,自动调控升运搅龙转速、螺旋喂种器转速和转角到最优工作参数组合。
[0109]
本发明解决了现有技术中分布喂入式马铃薯排种装置存在的自动化程度低、供种与排种频率难匹配等问题,实现了螺旋喂种器124内的种薯分布情况和试验种箱10内种薯余量检测等关键工作参数检测和控制,并自动调控升运搅龙转速、螺旋喂种器转速和转角到最优工作参数组合,提高了分布喂入式马铃薯排种装置自动化程度水平,保证了持续稳定供种和高效排种,提升了播种效率和种植精度。
[0110]
当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1