省力外骨骼割稻机构
1.本发明涉及一种辅助割稻装置,更具体的说是涉及一种省力外骨骼割稻机构。
背景技术:
2.割稻是在稻谷成熟以后需要进行必要操作,通过将稻田上成熟的稻谷割下来,然后再通过打谷的方式,将割下来的稻禾上的谷粒打下来,如此实现对于稻谷的收获,而目前现有的割稻方式主要有手动和机械两种。
3.机械方式为目前现有的割稻车,其一般体积较大,适用于地面较平且种植面积较大的场合,不适用于种植面积小,且为梯田结构的场合,因此现有技术中出现了一种背负式的小型割稻机,通过背带背住一个电机或是燃油机,然后再通过一根较长的连杆连接一个圆形的刀片,然后在圆形刀片的上方设置一个弧线的挡板,在割稻的过程中,通过刀片切割稻谷,然后利用挡板的作用使得稻谷只倾向一边,但是上述结构的小型割稻机,燃油机或是电机还是会存在一定的重量的,因此使用人员在使用的过程中还是具有较大的体力消耗,且现有技术中因为电池容量的原因,一般都是采用燃油机来作为动力,因此还会存在需要加油的问题,减低了人们使用的便携性,同时其在割稻的过程中是一直需要保持处于人脚的前方的,因此在割稻的过程中若是人手一下不能保持当前动作的话,便很容易出现刀片割伤人脚的情况。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种便携性高且安全性更高的的省力外骨骼割稻机构。
5.为实现上述目的,本发明提供了如下技术方案:一种省力外骨骼割稻机构,包括腰带、前护板和支撑杆,所述腰带用于绑到外部人腰上,所述前护板固定安装在腰带相对于人前方的位置上,所述支撑杆的上端铰接在前护板上,且具有角度卡止位,所述支撑杆为弹性可伸缩设置,该支撑杆的下端固定安装有底筒,当支撑杆处于角度卡止位时,支撑杆向前翘起,底筒处于人脚的前方,所述腰带的侧部设有可旋转的手臂支撑架。
6.作为本发明的进一步改进,还包括辅助切刀、切刀杆和动力装置,所述切刀杆通过绑带绑到人的手臂上,所述辅助切刀安装在切刀杆相对于人手腕的一端上,所述动力装置通过绑带连接在人的膝盖上,所述动力装置包括挤压气囊和连接管,所述挤压气囊处于腘窝内,以在人蹲下来时被挤压,所述连接管的一端与挤压气囊连接,另一端与辅助切刀连接,以在挤压气囊被挤压时,驱动辅助切刀进行切割动作,所述连接管的管身被绑在切刀杆上,所述支撑杆内设有活塞机构,所述活塞机构通过管道与连接管连接。
7.作为本发明的进一步改进,辅助切刀包括刀座、左刀和右刀,所述刀座固定安装在切刀杆的端部上,并处于人手的下方,所述左刀和右刀的一端均铰接在刀座上,所述左刀和右刀背向刃部的一端连接有气动杆,所述气动杆与连接管连接,所述气动杆的中部套接有连接环,该连接环固定安装在刀座上,所述气动杆的侧壁上固定有套管,所述连接管连接在
套管上,所述套管内设有压力阀。
8.作为本发明的进一步改进,所述刀座上固定有供人手握的刀柄,所述刀柄上套接有软垫,所述软垫上开设有防滑纹路。
9.作为本发明的进一步改进,还包括辅助抓取头和驱动装置,所述驱动装置包括驱动气囊和绑带,所述驱动气囊固定在绑带上,通过绑带安装到人的腘窝内,所述驱动气囊通过管道与辅助抓取头连接,所述辅助抓取头包括抓取手套和抓取杆,所述抓取杆的杆身贴合固定在抓取手套的背面上,所述抓取杆为气动结构,并与管道连接,以接收管道输出的气体后卷缩。
10.作为本发明的进一步改进,所述抓取杆包括底杆、第一弯杆和第二弯杆以及第三弯杆,所述底杆、第一弯杆和第二弯杆以及第三弯杆分别固定在手套的手背、中指的第一段指关节、中指的第二段指关节和中指的第三段指关节的位置上,所述底杆的一端与管道连接,另一端与第一弯杆的一端铰接,所述第一弯杆的另一端与第二弯杆的一端铰接,所述第二弯杆的另一端与第三弯杆铰接,所述底杆、第一弯杆和第二弯杆以及第三弯杆的铰接处均按照有气动电机,所述底杆、第一弯杆和第二弯杆以及第三弯杆内穿设有气道,连接各个气动电机。
11.作为本发明的进一步改进,所述气动电机包括前连杆和后连杆,所述前连杆的一端与底杆、第一弯杆或第二弯杆的端部同轴固定,所述后连杆的一端与第一弯杆、第二弯杆或第三弯杆的端部同轴固定,所述前连杆和后连杆的另一端分别固定有前铰接盘和后铰接盘,所述前铰接盘和后铰接盘之间通过转轴同轴可旋转连接,所述前铰接盘相对于后铰接盘的一端端面上开设有圆弧形滑槽,该圆弧形滑槽的一端与气道相互连通,另一端的侧壁上开设有缺口与气道相连通,所述后铰接盘相对于前铰接盘的一端端面上固定有活塞,所述活塞可滑移的嵌设在圆弧形滑槽内,当前铰接盘和后铰接盘相互拼接时,圆弧形滑槽构成密封结构。
12.本发明的有益效果,通过腰带、前护板和支撑杆的组合设置,可实现在割稻的过程中,对于人的弯腰这个动作进行有效的支撑作用,如此大大的节省了人们在用镰刀割稻过程中的体力,而通过手臂支撑架的设置,则可实现在使用现有的电动或是油动割稻机时,可以有效的实现支撑人的拿取手臂的作用,避免出现手臂脱力导致机器损坏或是割伤脚的情况。
附图说明
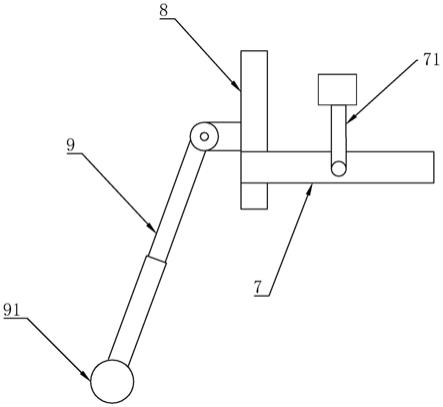
13.图1为本发明的省力外骨骼割稻机构的结构示意图;
14.图2为辅助切刀的结构示意图;
15.图3为辅助抓取头的结构示意图;
16.图4为图3中气动电机的结构示意图。
具体实施方式
17.下面将结合附图所给出的实施例对本发明做进一步的详述。
18.参照图1至3所示,本实施例的一种省力外骨骼割稻机构,包括腰带7、前护板8和支撑杆9,所述腰带7用于绑到外部人腰上,所述前护板8固定安装在腰带7相对于人前方的位
置上,所述支撑杆9的上端铰接在前护板8上,且具有角度卡止位,所述支撑杆9为弹性可伸缩设置,该支撑杆9的下端固定安装有底筒91,当支撑杆9处于角度卡止位时,支撑杆9向前翘起,底筒91处于人脚的前方,所述腰带7的侧部设有可旋转的手臂支撑架71,在使用本实施例的机构的过程中,只需要将要带7绑到人腰上即可,如此在人前倾弯腰的时候,支撑杆9下端的底筒91便会抵接到外部地面上,通过支撑杆9提供一个支撑力给前护板8,之后通过前护板8便可有效的实现对于人体的支撑作用,如此大大的节省了人的割稻体力,同时还可通过底筒91和手臂支撑架71的作用,有效的实现在采用电动或是油动割稻时,节省人的手臂力量的效果。
19.作为改进的一种具体实施方式,还包括辅助切刀1、切刀杆2和动力装置3,所述切刀杆2通过绑带绑到人的手臂上,所述辅助切刀1安装在切刀杆2相对于人手腕的一端上,所述动力装置3通过绑带连接在人的膝盖上,所述动力装置3包括挤压气囊31和连接管32,所述挤压气囊31处于腘窝内,以在人蹲下来时被挤压,所述连接管32的一端与挤压气囊31连接,另一端与辅助切刀1连接,以在挤压气囊31被挤压时,驱动辅助切刀1进行切割动作,所述连接管32的管身被绑在切刀杆2上,所述支撑杆9内设有活塞机构,所述活塞机构通过管道与连接管32连接,在使用本实施例的割稻装置的过程中,首先通过绑带的方式将切刀杆2绑到人的右手臂上,然后将挤压气囊31绑到人腿上的腘窝上,在割稻操作的时候,首先通过左手抓住稻杆,然后右手带着辅助切刀1靠近就待切割的位置,接着通过下蹲的方式,便可通过辅助切刀1将稻杆切下来,如此相比于现有技术中采用背负燃油机的方式,去除了燃油机的重量,减轻了人的负担,同时也不需要进行加油操作,使用起来更加方便快捷,同时也减少了许多部件,成本也更低,能够更好的适用于现有的种植面积小的场合。
20.作为改进的一种具体实施方式,所述辅助切刀1包括刀座11、左刀12和右刀13,所述刀座11固定安装在切刀杆2的端部上,并处于人手的下方,所述左刀12和右刀13的一端均铰接在刀座11上,所述左刀12和右刀13背向刃部的一端连接有气动杆14,所述气动杆14与连接管32连接,所述气动杆14的中部套接有连接环,该连接环固定安装在刀座11上,所述气动杆14的侧壁上固定有套管15,所述连接管32连接在套管15上,所述套管15内设有压力阀,通过刀座11的设置,便可提供一个切割的底座,供左刀12和右刀13安装,然后通过气动杆14的设置,便可有效的实现接收挤压气囊31被挤压时输出的空气,然后通过气动杆14伸长的方式来实现驱动左刀12和右刀13的左右旋转,进而实现切割稻谷的效果,且整体结构简单,容易实现。
21.作为改进的一种具体实施方式,所述刀座11上固定有供人手握的刀柄16,所述刀柄16上套接有软垫,所述软垫上开设有防滑纹路,通过上述结构的设置,人在割稻的过程中就能够更加方便的抓取刀座11了,使得整体装置使用起来更加的方便快捷。
22.作为改进的一种具体实施方式,还包括辅助抓取头4和驱动装置6,所述驱动装置6包括驱动气囊61和绑带,所述驱动气囊61固定在绑带上,通过绑带安装到人的腘窝内,所述驱动气囊61通过管道与辅助抓取头4连接,所述辅助抓取头4包括抓取手套41和抓取杆42,所述抓取杆42的杆身贴合固定在抓取手套41的背面上,所述抓取杆42为气动结构,并与管道连接,以接收管道输出的气体后卷缩,由于在割稻的过程中为了保证稻谷割下来时不会出现散乱的情况,因此都需要左手抓着稻杆,如此采用将辅助抓取头4设置成抓取手套41和抓取杆42的组合作用,便可实现在抓取的过程中,先通过手指驱动抓取手套41进行抓取动
作,将外部的稻杆抓住,并且在人蹲下来的时候,驱动气囊61就会被人的腿部挤压,输出气体至抓取杆42内,抓取杆42便会产生弯曲动作,并且在驱动气囊61被挤压时,抓取杆42便会保持弯曲状态,因此便可避免在割稻的过程中,因为手放松导致的稻杆散开的问题,同时也不需要同现有技术中一样,需要使用较大的力抓取稻杆了。
23.作为改进的一种具体实施方式,所述抓取杆42包括底杆421、第一弯杆422和第二弯杆423以及第三弯杆424,所述底杆421、第一弯杆422和第二弯杆423以及第三弯杆424分别固定在手套41的手背、中指的第一段指关节、中指的第二段指关节和中指的第三段指关节的位置上,所述底杆421的一端与管道连接,另一端与第一弯杆422的一端铰接,所述第一弯杆422的另一端与第二弯杆423的一端铰接,所述第二弯杆423的另一端与第三弯杆424铰接,所述底杆421、第一弯杆422和第二弯杆423以及第三弯杆424的铰接处均按照有气动电机425,所述底杆421、第一弯杆422和第二弯杆423以及第三弯杆424内穿设有气道,连接各个气动电机425,通过上述结构的设置,便可实现抓取杆42能够配合人手的结构进行弯曲抓取了,与人手的贴合度更高。
24.作为改进的一种具体实施方式,所述气动电机425包括前连杆4251和后连杆4252,所述前连杆4251的一端与底杆421、第一弯杆422或第二弯杆423的端部同轴固定,所述后连杆4252的一端与第一弯杆422、第二弯杆423或第三弯杆424的端部同轴固定,所述前连杆4251和后连杆4252的另一端分别固定有前铰接盘4253和后铰接盘4254,所述前铰接盘4253和后铰接盘4254之间通过转轴同轴可旋转连接,所述前铰接盘4253相对于后铰接盘4254的一端端面上开设有圆弧形滑槽,该圆弧形滑槽的一端与气道相互连通,另一端的侧壁上开设有缺口与气道相连通,所述后铰接盘4254相对于前铰接盘4253的一端端面上固定有活塞,所述活塞可滑移的嵌设在圆弧形滑槽内,当前铰接盘4253和后铰接盘4254相互拼接时,圆弧形滑槽构成密封结构,通过上述结构的设置,便可实现利用气道结构,使得在驱动气囊61被挤压的时候,空气从气道依次进入到前连杆4251和后连杆4252内,因此便会推动活塞,使得前铰接盘4253和后铰接盘4254相对旋转,进而实现驱动后连杆4252产生旋转,使得第一弯杆422、第二弯杆423和第三弯杆424产生相互旋转,进而实现辅助抓取的效果。
25.其中,本实施例中的挤压气囊31和驱动气囊61结构相同,在被挤压后的复位方式为通过复位弹簧的方式,通过复位弹簧的弹力来实现复位的效果,其中本实施例中的切刀杆2上固定有缓冲杆,在缓冲杆的端部设置一个支撑盘,在割稻的过程中,支撑盘会被支撑在外部田地上,然后通过缓冲杆的支撑作用,对人的右手进行支撑,如此进一步的减少了人在割稻过程中所消耗的体力。
26.综上所述,本实施例的割稻装置,通过挤压气囊31和连接管32以及辅助切刀1的设置,可转移人在蹲下来的过程中所产生的力量到辅助切刀1上,如此相比于现有技术中的方式,减少了燃油机,大大的减少了人的负重,降低割稻人员的工作量。
27.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1