一种驱动型犁旋组合式一体机的双刃型旋耕装置
1.本发明属于农业机械中耕耘机械技术领域,具体涉及一种驱动型犁旋组合式一体机的双刃型旋耕装置。
背景技术:
2.长江中下游稻-油轮作地区常年采用传统耕作机械进行耕整地,造成了土壤耕层变薄,犁低层厚度增加,土壤质量退化等问题;油菜的播种需要保证土壤细碎,厢面平整,但长江中下游地区常年雨水充沛,导致土壤含水率波动大,土壤黏重板结,传统的旋耕碎土装置在该地区难以保证作业碎土质量;油菜播种前茬作物残余秸秆量大,留茬较高,传统的旋耕机械易出现缠草、缠秸秆的现象,同时秸秆易与土壤形成秸秆-土壤混合物易黏附在耕作机械工作部件上,引起堵塞、整机通过性能差等问题。采用传统的耕作机械秸秆还田难度大。因此,设计一种双刃型旋耕装置以适应长江中下游流域土壤黏重板结,秸秆量大的作业工况。
技术实现要素:
3.本发明的目的在于针对长江中下游地区土壤黏重板结、含水率波动大,前茬作物秸秆量大,传统耕作机械难以保证油菜播种土壤质量要求等问题;提供一种能提高碎土率、灭茬率的驱动型犁旋组合式一体机的双刃型旋耕装置。
4.为实现上述目的,设计了一种驱动型犁旋组合式一体机的双刃型旋耕装置,包括旋耕刀辊及若干组沿旋耕刀辊轴向且均匀布置在旋耕刀辊上的双刃型旋耕刀组件;每组双刃型旋耕刀组件包括旋耕刀盘、左弯双刃型旋耕刀及右弯双刃型旋耕刀,左弯双刃型旋耕刀和右弯双刃型旋耕刀均安装在旋耕刀盘的同一面上且左弯双刃型旋耕刀和右弯双刃型旋耕刀的安装夹角为180
°
;
5.所述左弯双刃型旋耕刀和右弯双刃型旋耕刀均包括刀身及刀柄,刀柄固定在旋耕刀盘上;刀身包括长刃部和短刃部,长刃部的回转半径与短刃部的回转半径比为1:0.85~0.95。
6.进一步地,所述长刃部包括长刃部侧切刃和长刃部正切刃,长刃部侧切刃的刃口曲线和长刃部正切刃的刃口曲线均为阿基米德螺线;阿基米德螺旋线方程为
7.ρa=ρ0+k
′
θ
[0008][0009][0010]
式中:ρa为螺线上任意一点极径
[0011]
ρ0为螺线起点的极径
[0012]k′
为螺线极角每增加1弧度极径的增量
[0013]
θ为螺线上任意点的极角
[0014]
s为长刃部切土节距
[0015]
a1为长刃部耕深
[0016]
r1为长刃部回转半径
[0017]
ρn为螺线终点处极角
[0018]
θn为螺线终点处极径
[0019]
且螺线终点处极径θn与阿基米德螺线终点处滑切角τn关系如下
[0020][0021]
进一步地,所述阿基米德螺旋线满足
[0022][0023][0024]
式中:τ为阿基米德螺旋线上的静态滑切角
[0025]
τc为阿基米德螺旋线上的动态滑切角
[0026]
δτ为与阿基米德螺旋线上的静态滑切角τ与阿基米德螺旋线上的动态滑切角τc之差
[0027]
为秸秆和/或根茬对双刃型旋耕刀刃的摩擦角
[0028]
v为拖拉机前进速度
[0029]
ω为旋耕刀回转角速度
[0030]a′
为切土时侧切刃上任意点离耕底的距离;
[0031]
同时满足阿基米德螺旋线上静态滑切角的正切值与螺线上任意一点极径ρa成正比,即
[0032]
tanτ=k
′
ρa。
[0033]
进一步地,所述短刃部包括短刃部侧切刃和短刃部正切刃,短刃部侧切刃的刃口曲线和短刃部正切刃的刃口曲线均为正弦指数曲线;正弦指数曲线方程为
[0034][0035]
式中:ρb为正弦指数曲线上任意一点极径
[0036]
ρ1为正弦指数曲线起点极径
[0037]
τ0为正弦指数曲线起点静态滑切角
[0038]
k为正弦指数曲线上静态滑切角递减比
[0039]
θ为正弦指数曲线上任意一点的极角
[0040]
满足正弦指数曲线静态滑切角τ
co
与正弦指数曲线上任意一点的极角σ的关系为
[0041]
τ
co
=τ
0-kσ。
[0042]
进一步地,所述正弦指数曲线起点静态滑切角τ0范围为35
°
~55
°
,正弦指数曲线
上静态滑切角递减比k取0.06~0.11。
[0043]
进一步地,所述长刃部正切刃工作幅宽与短刃部正切刃工作幅宽比例为1:0.7~0.8。
[0044]
进一步地,所述旋耕刀辊的横截面周长大于水稻秸秆残茬高度。
[0045]
进一步地,所述旋耕刀盘安装间距b
′
=b+δb,b为长刃部工作幅宽,δb为15~20mm。
[0046]
进一步地,所有所述双刃型旋耕刀组件在旋耕刀辊上按照双头螺旋线排列。
[0047]
与现有技术相比,本发明具有以下优点:
[0048]
其一,本发明双刃型旋耕装置拥有一对正切刃和一对侧切刃,其能够有效的提高整机作业后的碎土率,一把刀片旋转一周能够对秸秆残茬滑切两次,提高整机作业后的灭茬率。
[0049]
其二,本发明所采用的旋耕刀辊,其滚筒周长大于水稻田残茬留茬高度,能够有效避免秸秆缠绕在旋耕刀辊上形成土壤秸秆混合物,提高了整机作业时的通过性能。
附图说明
[0050]
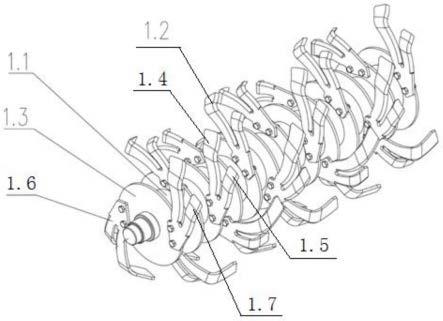
图1为本发明双刃型旋耕装置结构示意图;
[0051]
图2为图1中右弯双刃型旋耕刀结构示意图;
[0052]
图3为图1中左弯双刃型旋耕刀运动轨迹示意图;
[0053]
图4为图1的为工作原理示意图;
[0054]
图5为本发明驱动型犁旋组合式一体机结构示意图;
[0055]
图6为图5的底部示意图;
[0056]
图7为图6中右端双刃型旋耕装置结构示意图。
[0057]
图中,双刃型旋耕装置1、旋耕刀辊1.1、双刃型旋耕刀组件 1.2、旋耕刀盘1.3、长刃部1.4、短刃部1.5、右弯双刃型旋耕刀1.6、左弯双刃型旋耕刀1.7、花键套1.8、轴头1.9、主机架2、斜拉杆 2.1、三点悬挂2.2、机架侧板2.3、机架支撑前梁2.4、机架支撑后梁2.5、驱动圆盘犁组3、中间犁4、开畦沟前犁5、开畦沟后犁6、平土托板7、中央人字形齿轮箱8、长刃部侧切刃9、长刃部正切刃 10、短刃部侧切刃11、短刃部正切刃12。
具体实施方式
[0058]
下面结合附图和具体实施例对本发明作进一步的详细说明,以便本领域技术人员理解。
[0059]
如图1、2所示驱动型犁旋组合式一体机的双刃型旋耕装置1,包括旋耕刀辊1.1及若干组沿旋耕刀辊1.1轴向且均匀布置在旋耕刀辊1.1上的双刃型旋耕刀组件1.2。每组双刃型旋耕刀组件1.2包括旋耕刀盘1.3、左弯双刃型旋耕刀1.7及右弯双刃型旋耕刀1.6,旋耕刀盘1.3固定安装在旋耕刀辊1.1上,左弯双刃型旋耕刀1.7和右弯双刃型旋耕刀1.6均安装在旋耕刀盘1.3的同一面上且左弯双刃型旋耕刀1.7和右弯双刃型旋耕刀1.6的安装夹角为180
°
,同时,所有双刃型旋耕刀组件1.2在旋耕刀辊1.1上按照双头螺旋线排列。
[0060]
左弯双刃型旋耕刀1.7和右弯双刃型旋耕刀1.6均包括刀身及刀柄,刀柄固定在旋耕刀盘1.3上。刀身包括长刃部1.4和短刃部 1.5,长刃部1.4的回转半径与短刃部1.5的回
转半径比为1:0.85~0.95。长刃部1.4包括长刃部侧切刃9和长刃部正切刃10,短刃部1.5包括短刃部侧切刃11和短刃部正切刃12,且长刃部侧切刃9的刃口曲线和长刃部正切刃10的刃口曲线均为阿基米德螺线,短刃部侧切刃11的刃口曲线和短刃部正切刃12的刃口曲线均为正弦指数曲线。
[0061]
阿基米德螺旋线方程为
[0062]
ρa=ρ0+k
′
θ
[0063][0064][0065]
式中:ρa为螺线上任意一点极径
[0066]
ρ0为螺线起点的极径,mm
[0067]k′
为螺线极角每增加1弧度极径的增量,mm
[0068]
θ为螺线上任意点的极角,rad
[0069]
s为长刃部切土节距,mm
[0070]
a1为长刃部耕深,mm
[0071]
r1为长刃部回转半径,mm
[0072]
ρn为螺线终点处极角,mm
[0073]
θn为螺线终点处极径,mm
[0074]
螺线终点处极径θn与阿基米德螺线终点处滑切角τn关系如下
[0075][0076]
长刃部切土节距
[0077]
式中:v为拖拉机前进速度(mm/s)
[0078]
n为旋耕转速(r/min)
[0079]
z为同一切土小区的双刃型旋耕刀数量。
[0080]
要满足阿基米德螺旋线不缠草、耕作阻力小和产生滑切效果的要求需保证
[0081][0082]
因此应满足
[0083][0084][0085]
式中:τ为阿基米德螺旋线上的静态滑切角
[0086]
τc为阿基米德螺旋线上的动态滑切角
[0087]
δτ为与阿基米德螺旋线上的静态滑切角τ与阿基米德螺旋线上的动态滑切角τc之差
[0088]
为秸秆和/或根茬对双刃型旋耕刀刃的摩擦角
[0089]
v为拖拉机前进速度(mm/s)
[0090]
ω为旋耕刀回转角速度(rad/s)
[0091]a′
为切土时侧切刃上任意点离耕底的距离,mm
[0092]
在拖拉机前进速度,旋耕刀回转速度一定的情况下,刀片在入土过程中δτ值逐渐减少,当刀刃上任意点处于地表时即a
′
=0时δτ值是工作过程中的最大值。
[0093]
阿基米德螺旋线上静态滑切角的正切值与极径ρa成正比,即
[0094]
tanτ=k
′
ρa[0095]
阿基米德螺旋线上的静态滑切角τ随着长刃部回转半径的增加逐渐增加,刀刃每转过单位角度,径向的切土长度相同,使得刃口切土部分负荷变化较为均匀。
[0096]
正弦指数曲线方程为
[0097][0098]
式中:ρb为正弦指数曲线上任意一点极径
[0099]
ρ1为正弦指数曲线起点极径,mm
[0100]
τ0为正弦指数曲线起点静态滑切角,(
°
)
[0101]
k为正弦指数曲线上静态滑切角递减比,
[0102]
θ为正弦指数曲线上任意一点的极角,rad
[0103]
正弦指数曲线静态滑切角τ
co
与极角θ的关系为
[0104]
τ
co
=τ
0-kσ
[0105]
正弦指数曲线静态滑切角与极角成线性关系,随着极角的增加,正弦指数曲线静态滑切角成线性递减。采用正弦指数曲线作为短刃部侧切刃的刃口曲线可以有效防止刀柄挂草,保证旋耕刀在留茬高,多草的田块中不缠草。
[0106]
选择不同的曲线起点正弦指数静态滑切角τ0和正弦指数曲线上静态滑切角递减比k能够得到不同性能曲线。参考农业机械设计手册,要保证短刃部侧切刃工作过程中不缠草,刀柄基部刃口滑切角应大于短刃部侧切刃刃口曲线端点的滑切角,但滑切角过大,旋耕刀作业摩擦阻力增加,曲线起点静态滑切角τ0范围35
°
~55
°
,曲线上静态滑切角递减比k取0.06~0.11。为保证长刃部正切刃与短刃部正切刃之间不夹土、缠草,应尽量减小两正切面的重叠面积,因此设计长刃部正切刃工作幅宽与短刃部正切刃工作幅宽比例为1: 0.7~0.8。
[0107]
为避免旋耕刀辊大量缠草,旋耕刀辊的横截面周长应大于水稻秸秆残茬高度。旋耕刀盘安装间距b
′
=b+δb,b为长刃部工作幅宽,δb为15~20mm。
[0108]
本装置在田间工作时,双刃型旋耕刀短刃部、长刃部运动轨迹均为余摆线,短刃部侧切刃会首先接触秸秆-土壤,对土壤秸秆产生切削作用,当双刃型旋耕刀片在湿田及较为松软的土壤中工作时,秸秆不能被切断,秸秆将沿着短刃部侧切刃滑移,并脱离短刃部侧切刃与长刃部侧切刃接触,由长刃部侧切刃继续切削秸秆;切土过程中,双刃型旋耕刀短刃部正切刃会首先切削厚度为h的土壤,之后过度到长刃部正切刃会切削厚度为b的土壤,由工
作原理图4可知h+b=s。而传统旋耕刀切削最小土壤厚度为切土节距s,因此,相比较传统旋耕刀,双刃型旋耕装置切削土壤厚度小于切土节距,有更好的土壤细碎能力。田间试验验证,搭载双刃型旋耕装置的驱动型犁旋一体机工作后碎土率为94.74%,秸秆埋覆率为95.95%,比较搭载传统旋耕装置的驱动型犁旋一体机,碎土率提高12.43%,秸秆埋覆率提高3.65%。
[0109]
如图2、3所示驱动型犁旋组合式一体机,包括主机架2、中央人字形双轴齿轮箱8、安装在中央人字形双轴齿轮箱8前轴的驱动圆盘犁组3、安装在中央人字形双轴齿轮箱8后轴的旋耕装置、安装在中央人字形双轴齿轮箱8前方的中间犁4、安装在主机架2后方的平土托板7、安装在主机架2前方的开畦沟前犁5、安装在主机架后方的开畦沟后犁6;其中,主机架2包括斜拉杆2.1、三点悬挂 2.2、两边的机架侧板2.3、前端的机架支撑前梁2.4和后端的机架支撑后梁2.5,支撑前梁2.4和后梁2.5两端安装有法兰盘,通过螺栓与两边机架侧板2.3连接;中央人字形双轴齿轮箱8安装在支撑前梁2.4和支撑后梁2.5之间;平土托板7通过销钉向下安装在支撑后梁2.5后方。
[0110]
旋耕装置包括两组双刃型旋耕装置1,左端双刃型旋耕装置中的旋耕刀轴右端通过花键套1.8与中央人字形双轴齿轮箱8后轴左端连接、左端通过轴头1.9与主机架2的机架侧板2.3连接;右端双刃型旋耕装置中的旋耕刀轴的左端通过花键套1.8与中央人字形双轴齿轮箱8后轴右端连接、右端通过轴头1.9与主机架2的机架侧板2.3连接。左端双刃型旋耕装置的双刃型旋耕刀组件与右端双刃型旋耕装置的双刃型旋耕刀组件呈螺旋线旋向相反且升角相同布置。
[0111]
工作原理:本发明双刃型旋耕装置1安装在主机架2内,由中央人字形双轴齿轮箱8将拖拉机产生的动力传给前后输出轴带动驱动圆盘犁组3和双刃型旋耕装置1转动。耕作时,驱动圆盘犁组3 在圆盘犁轴旋转带动下初步完成对秸秆切断和土壤翻垡碎土作业,之后双刃型旋耕装置1进一步完成细碎土壤,平整地表,灭茬作业;双刃型旋耕装置1作业时,长刃部和短刃部交替入土,首先是短刃部接触未耕地土壤,初步对土壤、秸秆进行切削、破茬,然后再由回转半径较大的长刃部进一步对土壤进行切削、破茬;出土时长刃部和短刃部交替出土、抛土,将土壤抛送,撞击主机架,进一步破碎土壤;随着机具的前进,带动平土托板7工作使地表平整;同时开畦沟前后犁作业开出排水畦沟,实现拖拉机一次作业即可完成油菜种床整备工作,并且整机通过性能良好。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1