一种园林工程用自动化挖坑填土装置的制作方法
1.本技术涉及挖坑填土装置相关技术领域,尤其是涉及一种园林工程用自动化挖坑填土装置。
背景技术:
2.园林工程的概念有广义和狭义之分。从广义上讲,它是综合的景观建设工程,是自项目起始至设计、施工及后期养护的全过程。从狭义上理解,园林工程是指以工程手段和艺术方法,通过对园林各个设计要素的现场施工而使目标园地成为特定优美景观区域的过程。
3.在对园林工程的建设中,需要进行挖坑种植,并进行填土作业,在挖坑和填土的过程中,都是通过人工进行,因此需要耗费大量人力,同时影响工作效率。
技术实现要素:
4.为了解决需要耗费大量人力,同时影响工作效率的问题,本技术提供一种园林工程用自动化挖坑填土装置。
5.本技术提供一种园林工程用自动化挖坑填土装置,采用如下的技术方案:
6.一种园林工程用自动化挖坑填土装置,包括:
7.底座,所述底座的下方设置有支撑腿,且所述支撑腿设置有四个,所述底座的上方设置有挖坑机构,所述底座的中部转动设置有转台,所述转台的下侧设置有填土机构;
8.所述转台的两侧对称开设有滑槽,所述填土机构包括滑动设置于滑槽内部的滑块,所述滑块的下方均固定连接有铲土块,两个所述滑块之间设置有联动机构。
9.通过采用上述技术方案:通过滑块带动铲土块在滑槽内部进行滑动,可以将地面上的土壤铲入坑中,节省人力。
10.可选的,所述联动机构包括转动设置在滑槽内并分别螺纹穿过滑块的螺杆,所述转台位于螺杆的一侧设置有联动电机,所述联动电机的输出端上固定连接有第一斜齿轮,所述螺杆靠近第一斜齿轮的一端均固定连接有第二斜齿轮,所述第二斜齿轮与第一斜齿轮之间啮合连接。
11.通过采用上述技术方案:通过第一斜齿轮与第二斜齿轮,可以控制螺杆向两个方向进行转动,从而控制铲土块向相对方向进行移动。
12.可选的,所述底座的上方设置有固定杆,所述固定杆设置有四个,所述固定杆的上方均设置有活动杆,所述固定杆靠近活动杆的一端开设有限位槽,所述活动杆滑动设置于限位槽的内部,四个所述活动杆的上方固定连接有支撑板。
13.通过采用上述技术方案:通过固定杆对活动杆进行滑动支撑,并通过活动杆对支撑板进行固定支撑。
14.可选的,所述挖坑机构包括转动设置于支撑板上方的驱动电机,所述驱动电机的输出端贯穿支撑板,并固定连接有螺纹杆,所述螺纹杆的下方固定连接有钻杆,所述螺纹杆
与固定杆之间设置有限位机构。
15.通过采用上述技术方案:通过螺纹杆可以带动钻杆进行转动,使钻杆进行挖坑作业。
16.可选的,所述限位机构包括固定设置在四个固定杆之间的连接座,所述连接座的中部开设有螺纹孔,所述螺纹杆贯穿螺纹孔,并与螺纹孔之间螺纹连接。
17.通过采用上述技术方案:通过连接座对螺纹杆进行螺纹支撑,控制螺纹杆的移动方向。
18.可选的,所述底座的中部开设有通孔,所述钻杆贯穿通孔,并向下进行延伸。
19.通过采用上述技术方案:通过设置的通孔便于对钻杆进行通过,不会妨碍钻杆进行挖坑作业。
20.可选的,所述限位槽的内部均设置有压缩弹簧,所述压缩弹簧的两端分别与固定杆和活动杆之间固定连接。
21.通过采用上述技术方案:通过设置的压缩弹簧对活动杆进行弹性支撑,增加活动杆支撑的稳定性。
22.可选的,所述转台的边侧设置有旋转把手,所述旋转把手的表面设置有橡胶垫。
23.通过采用上述技术方案:通过设置的旋转把手可以控制转台进行支撑,并通过橡胶垫增加手感舒适度。
24.与现有技术相比,本技术的有益效果是:
25.1、在本技术中,通过驱动电机、螺纹杆、钻杆、连接座与螺纹孔之间相互配合,使螺纹杆带动钻杆对地面进行自动挖坑作业,减少人工劳动,提高工作效率。
26.2、在本技术中,通过联动电机、第一斜齿轮、第二斜齿轮、螺杆与滑块之间相互配合,可以使铲土块向相对方向进行移动,使铲土块可以将地面上的土壤进行铲进挖的坑中,并通过旋转把手可以控制转台进行转动,从而控制铲土块的铲土方向,提高填土效率。
附图说明
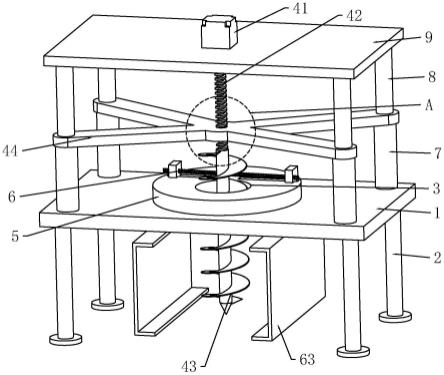
27.图1为本技术中的立体结构示意图;
28.图2为本技术中的固定杆内部结构示意图;
29.图3为本技术中的图1中a处放大结构示意图;
30.图4为本技术中的底座俯视结构示意图。
31.附图标记说明:1、底座;2、支撑腿;3、通孔;4、挖坑机构;41、驱动电机;42、螺纹杆;43、钻杆;44、限位机构;441、连接座;442、螺纹孔;5、转台;6、填土机构;61、滑槽;62、滑块;63、铲土块;64、联动机构;641、螺杆;642、联动电机;643、第一斜齿轮;644、第二斜齿轮;7、固定杆;71、限位槽;8、活动杆;9、支撑板;10、压缩弹簧;11、旋转把手。
具体实施方式
32.以下结合附图1-4对本技术作进一步详细说明。
33.本技术提供以下技术方案,请参阅图1,该园林工程用自动化挖坑填土装置,包括:对本技术整体进行支撑的底座1,底座1的下方设置有支撑腿2,且支撑腿2设置有四个,通过设置的支撑腿2对底座1进行稳定支撑。
34.请参阅图1和图2,底座1的上方设置有固定杆7,固定杆7设置有四个,通过设置的底座1对四个固定杆7进行固定支撑,固定杆7的上方均设置有活动杆8,固定杆7靠近活动杆8的一端开设有限位槽71,活动杆8滑动设置于限位槽71的内部,四个活动杆8的上方固定连接有支撑板9,通过设置的限位槽71对活动杆8进行滑动支撑,并使活动杆8对支撑板9进行固定支撑,其中限位槽71的内部均设置有压缩弹簧10,压缩弹簧10的两端分别与固定杆7和活动杆8之间固定连接,使限位槽71对活动杆8进行弹性支撑,使活动杆8不会轻易发生滑动。
35.请参阅图1,其中为了方便进行挖坑作业,底座1的上方设置有挖坑机构4,挖坑机构4包括转动设置于支撑板9上方的驱动电机41,驱动电机41的输出端贯穿支撑板9,并固定连接有螺纹杆42,通过设置的支撑板9对驱动电机41进行固定支撑,并通过驱动电机41的输出端对螺纹杆42进行固定支撑,且可以使驱动电机41带动螺纹杆42进行转动,螺纹杆42的下方固定连接有钻杆43,通过设置的螺纹杆42可以带动钻杆43进行同步转动。
36.请参阅图1和图3,同时为了对钻杆43的打孔深度进行控制,螺纹杆42与固定杆7之间设置有限位机构44,限位机构44包括固定设置在四个固定杆7之间的连接座441,通过设置的固定杆7对连接座441进行固定支撑,连接座441的中部开设有螺纹孔442,螺纹杆42贯穿螺纹孔442,并与螺纹孔442之间螺纹连接,通过设置的螺纹孔442对螺纹杆42进行螺纹支撑,使螺纹杆42在转动时才能进行位置升降,同时对螺纹杆42的移动方向进行限定。
37.请参阅图4,底座1的中部转动设置有转台5,通过设置的底座1对转台5进行转动支撑,转台5的中部开设有通孔3,钻杆43贯穿通孔3,并向下进行延伸,使通过设置的钻杆43的可以对地面进行打孔作业,且转台5的边侧设置有旋转把手11,旋转把手11的表面设置有橡胶垫,通过设置的旋转把手11可以控制转台5进行转动,并通过橡胶垫可以增加手感舒适度。
38.请参阅图1和图4,为了自动将挖出来的土壤进行填合,减少人力劳动,转台5的下侧设置有填土机构6,转台5的两侧对称开设有滑槽61,填土机构6包括滑动设置于滑槽61内部的滑块62,通过设置的滑槽61对滑块62进行滑动支撑,滑块62的下方均固定连接有铲土块63,通过设置的滑块62对铲土块63进行固定支撑,同时可以使滑块62带动铲土块63进行位置同步移动。
39.请参阅图1和图4,为了使铲土块63可以将地面的土壤填入坑中,两个滑块62之间设置有联动机构64,联动机构64包括两个分别转动设置在滑槽61内的螺杆641,螺杆641螺纹穿过滑块62,使螺杆641在转动时可以带动滑块62进行位置滑动,转台5位于螺杆641的一侧设置有联动电机642,联动电机642的输出端上固定连接有第一斜齿轮643,通过设置的转台5对联动电机642进行固定支撑,并通过联动电机642的输出端可以驱动第一斜齿轮643进行转动,螺杆641靠近第一斜齿轮643的一端均固定连接有第二斜齿轮644,第二斜齿轮644与第一斜齿轮643之间啮合连接,通过第一斜齿轮643可以带动两个第二斜齿轮644进行同步反向转动,使两个螺杆641向相反的方向进行转动,从而使两个滑块62带动铲土块63进行相对方向的移动,使铲土块63可以对地面上的土壤进行铲除。
40.本技术实施例的实施原理为:
41.使用时,启动驱动电机41,通过驱动电机41的输出端带动螺纹杆42进行转动,通过螺纹杆42带动钻杆43进行同步转动,并通过螺纹孔442可以带动螺纹杆42向下进行旋转移
动,使螺纹杆42带动钻杆43对地面进行自动挖坑作业,提高工作效率。
42.启动联动电机642,通过联动电机642的输出端带动第一斜齿轮643进行转动,通过第一斜齿轮643带动两个第二斜齿轮644进行同步反向转动,使两个螺杆641向相反的方向进行转动,从而使两个滑块62带动铲土块63进行相对方向的移动,使铲土块63可以对地面上的土壤进行铲进挖的坑中,并通过旋转把手11可以控制转台5进行转动,从而控制铲土块63的铲土方向,提高填土效率。
43.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1