一种椰子剥皮半自动化装置
1.本发明主要涉及椰子剥皮技术领域,特指一种椰子剥皮半自动化装置。
背景技术:
2.椰子是一种营养价值丰富的水果,含有蛋白质、糖类、脂肪、维生素和钾、钙、镁等矿物质,因此食用椰子的人们越来越多,椰子在食用前通常需要先对其剥皮。现有技术中对椰子剥皮通常是采用刀具配合手工操作的方式,然而由于椰子的外壁又厚又硬,从而使得椰子剥皮耗时耗力,且在剥皮过程中刀具容易划伤手,存在一定的危险性。因此,设置一种半自动化的剥皮装置具有一定的必要性。
技术实现要素:
3.本发明需解决的技术问题是:针对现有技术存在的技术问题,本发明提供一种结构简单合理、能够自动夹紧椰子,且可以产生平动剥皮力和扭转剥皮力从而实现对椰子壁剥落的椰子剥皮半自动化装置。
4.为了解决上述问题,本发明提出的解决方案为:一种椰子剥皮半自动化装置,包括底板,依次装置在所述底板上的立柱a、尖刀和立柱b,滑动套装在所述立柱a上的升降套筒,与所述升降套筒上固定相连的升降水平杆a,滑动装设在所述立柱b上的十字套筒,水平滑动套装在所述十字套筒的横向套筒中的升降水平杆b。
5.所述立柱a的中部外侧固定装设有凸轮电机架,所述凸轮电机架上固定装设有凸轮电机,所述凸轮电机的输出轴上固定装设有凸轮,所述凸轮上设有凸轮槽,所述凸轮固定装设在凸轮电机的输出轴上。
6.所述水平升降杆a上位于所述立柱a外侧的一端固定装设有顶杆,所述顶杆的下端转动装设有滚轮,所述滚轮位于所述凸轮槽中;所述升降水平杆a位于所述立柱a内侧的一端固定装设有爪a支架及活塞缸,所述爪a支架的下端装设有椰子爪a;所述活塞缸的活塞杆与固定装设在所述水平升降杆b上的所述固定挡块相连。
7.所述水平升降杆b的左端滑动套装在所述水平升降杆a的右端上;所述水平升降杆b上滑动装设有可升降运动的升降齿条,所述升降齿条与升降齿轮啮合传动,所述升降齿轮固定装设在齿轮电机的输出轴上,所述齿轮电机固定装设于齿轮电机架的下端,所述齿轮电机架上端与所述升降水平杆b固定相连。
8.所述升降齿条的下端装设有扭转电机,所述扭转电机的输出轴上固定装设有爪b支架,所述爪b支架上装设有椰子爪b。
9.升降锁紧弹簧的两端分别与所述升降齿条的上端、所述升降水平杆b相连。
10.所述椰子爪a和椰子爪b对称设置且结构完全相同,均呈m形状,均包括上折杆,下折杆,一端铰接装设于所述上折杆上的连杆a,一端铰接装设于所述下折杆上的连杆b,沿铅垂方向装设的椰子挡板,一端与所述椰子挡板铰接另一端与所述上折杆铰接的连杆c,一端与所述椰子挡板铰接另一端与所述下折杆铰接的连杆d,一端与所述椰子挡板上端相连另
一端与所述上折杆相连的上弹簧,一端与所述椰子挡板下端相连另一端与所述下折杆相连的下弹簧,以及沿水平方向装设一端与所述椰子挡板相连的中弹簧。
11.所述椰子爪a中的连杆a的另一端、连杆b的另一端以及中弹簧的另一端均与所述爪a支架固定相连;所述椰子爪b中的连杆a的另一端、连杆b的另一端以及中弹簧的另一端均与所述爪b支架固定相连;
12.所述尖刀5的尖端朝上且位于椰子爪a和椰子爪b之间。
13.进一步地,所述椰子爪a夹紧椰子之后,所述尖刀到左侧椰子挡板的距离为0.3
‑
0.8倍的椰子壁厚。
14.进一步地,所述升降锁紧弹簧为金属螺旋弹簧,且始终处于拉伸状态。
15.本发明与现有技术相比,具有如下优点和有益效果:本发明的椰子爪a和椰子爪b在活塞缸的作用下可以夹紧或松开椰子,凸轮电机驱动凸轮转动,可以产生一个向下的冲击力,从而将椰子的左侧壁快速插入到尖刀中;扭转电机转动,带动椰子爪b扭转,从而对椰子产生一个扭转剥皮力;齿轮电机正向转动,带动升降齿轮转动,进而使得椰子右侧的椰子爪b向下对椰子施加一个平动剥皮力。由此可知,本发明是一种结构简单合理、能够自动夹紧椰子,且可以产生平动剥皮力和扭转剥皮力从而实施对椰子壁剥落的椰子剥皮半自动化装置。
附图说明
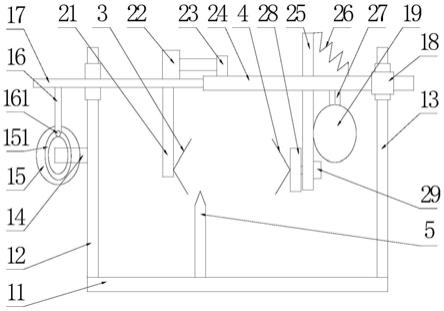
16.图1是本发明的一种椰子剥皮半自动化装置的结构原理示意图。
17.图2是本发明的椰子爪a和椰子爪b的结构原理示意图。
18.图中,11—底板;12—立柱a;13—立柱b;14—凸轮电机架;15—凸轮;151—椭圆槽;16—顶杆;161—滚轮;17—升降水平杆a;18—十字套筒;19—升降齿轮;21—爪a支架;22—活塞缸;23—固定挡块;24—升降水平杆b;25—升降齿条;26—升降锁紧弹簧;27—齿轮电机架;28—爪b支架;29—扭转电机;3—椰子爪a;30—椰子挡板;31—上折杆;32—下折杆;33—连杆a;34—连杆b;35—上弹簧;36—下弹簧;37—中弹簧;38—连杆c;39—连杆d;4—椰子爪b;5—尖刀;6—椰子。
具体实施方式
19.以下将结合附图和具体实施例对本发明作进一步详细说明。
20.参见图1,本发明的一种椰子剥皮半自动化装置,它包括底板11,依次装置在底板11上的立柱a12、尖刀5和立柱b13,滑动套装在立柱a12上的升降套筒,与升降套筒上固定相连的升降水平杆a17,滑动装设在立柱b13上的十字套筒18,水平滑动套装在十字套筒18的横向套筒中的升降水平杆b24。
21.立柱a12的中部外侧固定装设有凸轮电机架14,凸轮电机架14上固定装设有凸轮电机,凸轮电机的输出轴上固定装设有凸轮15,凸轮15上设有凸轮槽151。
22.水平升降杆a17上位于立柱a12外侧一端固定装设有顶杆16,顶杆16的下端转动装设有滚轮161,滚轮161位于凸轮槽151中;升降水平杆a17位于立柱a12内侧一端固定装设有爪a支架21,爪a支架21的下端装设有椰子爪a3;水平升降杆a17位于立柱a12内侧的一端还装设有活塞缸22,活塞缸22的活塞杆向右伸出与固定装设在水平升降杆b24上的固定挡块
23相连。
23.水平升降杆b24的左端滑动套装在水平升降杆a17的右端上;水平升降杆b24上滑动装设有可升降运动的升降齿条25,升降齿条25与升降齿轮19啮合传动连接,升降齿轮19固定装设在齿轮电机的输出轴上,齿轮电机固定装设于齿轮电机架27的下端,齿轮电机架27上端与升降水平杆b24固定相连。
24.升降齿条25的下端装设有扭转电机29,扭转电机29的输出轴上固定装设有爪b支架28,爪b支架28上装设有椰子爪b4。
25.升降锁紧弹簧26的两端分别与升降齿条25的上端、升降水平杆b24相连。
26.参见图2,椰子爪a3和椰子爪b4对称设置且结构完全相同,均呈m形状,均包括上折杆31,下折杆32,一端铰接装设于上折杆31上的连杆a33,一端铰接装设于下折杆32上的连杆b34,沿铅垂方向装设的椰子挡板30,一端与椰子挡板30铰接、另一端与上折杆31铰接的连杆c38,一端与椰子挡板30铰接、另一端与下折杆32铰接的连杆d39,一端与椰子挡板30上端相连、另一端与上折杆31相连的上弹簧35,一端与椰子挡板30下端相连、另一端与下折杆32相连的下弹簧36,以及沿水平方向装设且一端与椰子挡板30相连的中弹簧37。上弹簧35和下弹簧36用于确保椰子挡板3在夹紧椰子6的过程中不发生倾斜,此外在完成一个剥皮动作之后即释放椰子6时能够利用储存的弹性势能使上折杆31和下折杆32回到初始的几何位置。中弹簧37为抗压螺旋弹簧,且刚度大于上弹簧35或下弹簧36的刚度的两倍,上弹簧35和下弹簧36的刚度相等。由于中弹簧37的刚度远大于上弹簧35的刚度,从而使得椰子爪a3夹紧不同直径的椰子6时,左侧椰子挡板30可以发生微小的位移,但该位移与椰子壁厚相比可以忽略。
27.椰子爪a3中的连杆a33的另一端、连杆b34的另一端以及中弹簧37的另一端均与爪a支架21固定相连;椰子爪b4中的连杆a33的另一端、连杆b34的另一端以及中弹簧37的另一端均与爪b支架28固定相连。
28.尖刀5的尖端朝上且位于椰子爪a3和椰子爪b4之间且靠近椰子爪a3的一侧。
29.作为优选地,椰子爪a3夹紧椰子6之后,尖刀5到左侧椰子挡板30的距离为0.3
‑
0.8倍的椰子壁厚,从而确保椰子6向下运动时,尖刀插入到椰子壁中,以便剥落椰子壁。
30.作为优选地,升降锁紧弹簧26为金属螺旋弹簧,且始终处于拉伸状态。一方面始终处于单一受力状态即拉伸状态的升降锁紧弹簧26可以消除升降齿轮19与升降齿条25之间的啮合间隙,从而使得椰子爪b4与椰子爪a3之间具有更高的初始对心精度;另一方面由于升降锁紧弹簧26始终处于受拉伸状态,从而可以给予升降齿条25提供额外的一个向下作用力,在剥落椰子6的外壁过程中减小齿轮电机的能耗。
31.本发明的工作过程如下:
32.首先,操作人员将待剥皮的椰子6放置在椰子爪a3和椰子爪b4之间;活塞缸22工作,驱动活塞杆向左缩回,从而带动固定挡块23和升降水平杆b24沿着水平升降杆a17向左滑动,直至椰子爪a3和椰子爪b4夹紧椰子6;
33.凸轮电机转动半周,带动顶杆16和升降水平杆a17向下运动,进而带动升降水平杆b24向下运动,从而使得椰子爪a3和椰子爪b4夹紧的椰子6快速向下运动,直至尖刀5穿透椰子6左侧的椰子壁;此过程使得椰子6从最高位置平动至最低位置。
34.齿轮电机开始正向转动,带动升降齿轮19转动,进而带动升降齿条25向下运动,从
而推动爪b支架28向下运动,进而使得椰子6右侧的椰子爪b4向下对椰子6施加一个平动剥皮力;与此同时,扭转电机29也开始正向转动,带动爪b支架28绕扭转电机29的输出轴转动,从而通过椰子爪b4给予椰子6右部分一个扭转剥皮力。在平动剥皮力和扭转剥皮力的共同作用下,对尖刀5穿透的左侧椰子壁进行撕裂,从而完成对椰子6左侧壁的剥皮动作。
35.齿轮电机和扭转电机29反向转动,直至椰子爪b4回到剥皮前的工作状态。
36.凸轮电机继续转动半周,带动顶杆16和升降水平杆a17以及升降水平杆b24上升运动,直至椰子爪a3和椰子爪4回到初始高度;
37.活塞缸22反向工作,驱动活塞杆向右伸出,进而推动固定挡块23和升降水平杆b24沿着十字套筒18向右滑动,直至回到初始位置。从而完成一次四分之一圆周的椰子剥皮动作。
38.操作人员取出椰子6,转动90度后再次放置在在椰子爪a3和椰子爪b4之间,重复四次上述动作,即可完成整个椰子6的全部剥皮。
39.椰子爪a3和椰子爪b夹紧椰子6的开合原理:爪a支架21无水平方向的左右运动,而爪b支架28和升降齿条25可以沿水平方向平动。椰子6放置在在椰子爪a3和椰子爪b4之间后,当爪b支架28向左推动椰子6的同时挤压两个椰子挡板30,进而推动连杆c38和连杆d39向外运动,即向远离椰子6的中心运动,从而使得上折杆31顺时针方向转动,下折杆32逆时针方向转动,从而形成对椰子6的夹紧力,实现椰子爪a3和椰子爪b4的闭合夹紧动作;当爪b支架28向右运动时,由于中弹簧37储存了一定的压缩弹性势能,从而推动两个椰子挡板30向靠近椰子6中心的方向运动,从而实现椰子爪a3和椰子爪b4的张开动作。
40.以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应该属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1