一种牛蛙自动宰杀加工设备的制作方法
1.本发明涉及牛蛙宰杀技术领域,尤其是涉及一种牛蛙自动宰杀加工设备。
背景技术:
2.牛蛙是一种大型食用蛙,其个体硕大,生长速度快,具有高产高效等优点,从而成为食用蛙中的主要养殖种类。
3.牛蛙是集食用、药用和皮用于一身的大型经济蛙类。牛蛙肉是上乘美味食品和高级的保健药膳,同时也具有滋补解毒的功效,手术患者食用可促进伤口愈合;牛蛙皮是优质的乐器材料,上等的制革原料,还可提炼高级豁胶。目前,对于牛蛙的宰杀和取皮,多采用人工作业方式,不仅劳动强度大,而且宰杀质量、效率均很低,从而增加了牛蛙的加工利用成本。部分机械化宰杀设备,因其功能比较单一,宰杀开膛、去内脏、取皮等作业流程比较分散,不仅占用空间大,增加作业复杂度,而且宰杀质量、加工效率也不能得到保证。
技术实现要素:
4.本发明要解决的技术问题是:针对现有技术存在的问题,提供一种牛蛙自动宰杀加工设备,提高牛蛙宰杀质量和作业效率。
5.本发明要解决的技术问题采用以下技术方案来实现:一种牛蛙自动宰杀加工设备,包括摆正定位装置、夹切机构、解剖掏挖装置以及皮肉分离装置和加工平台,所述的摆正定位装置先对加工平台上的牛蛙进行姿态摆正,再通过夹切机构对摆正后的牛蛙进行颈项部环切作业,然后通过解剖掏挖装置对环切后的牛蛙进行开膛去内脏作业,再由皮肉分离装置对开膛去内脏后的牛蛙进行剥皮作业,最后利用夹切机构对剥皮后的牛蛙进行头部去除作业。
6.进一步地,所述的摆正定位装置包括左前挡板、右前挡板、左后挡板以及右后挡板和摆正驱动机构,所述的左前挡板与右前挡板相对设置,所述的左后挡板与右后挡板相对设置;当摆正驱动机构进行摆正动作时,所述的左前挡板与右前挡板之间相对于加工平台形成纵向夹持动作,所述的左后挡板、右后挡板分别相对于加工平台同步形成横向推送动作。
7.进一步地,所述的摆正驱动机构包括连接板,所述的左前挡板与第一滑块固定连接,所述的第一滑块与第一连杆一端之间形成相对转动的活动连接结构,所述的右前挡板与第四滑块固定连接,所述的第四滑块与第四连杆一端之间形成相对转动的活动连接结构,所述第一连杆的另一端、第四连杆的另一端分别与连接板之间形成相对转动的活动连接结构,所述的第一滑块、第四滑块分别与第一滑轨形成滑动配合结构;当摆正驱动机构通过连接板进行摆正动作时,所述的第一滑块带动左前挡板、第四滑块带动右前挡板沿第一滑轨同步相对靠拢。
8.进一步地,所述的摆正驱动机构包括连接板,所述的左后挡板与第二滑块固定连接,所述的第二滑块与第二连杆一端之间形成相对转动的活动连接结构,所述的右后挡板
与第三滑块固定连接,所述的第三滑块与第三连杆一端之间形成相对转动的活动连接结构,所述第二连杆的另一端、第三连杆的另一端分别与连接板之间形成相对转动的活动连接结构,所述的第二滑块、第三滑块分别与第二滑轨形成滑动配合结构;当摆正驱动机构通过连接板进行摆正动作时,所述的第二滑块带动左后挡板、第三滑块带动右后挡板沿第二滑轨同步相对靠拢。
9.进一步地,所述的夹切机构包括上活动座、下活动座和夹切驱动机构,所述的上活动座上设置上切皮刀具,所述的下活动座上设置与上切皮刀具相对的下切皮刀具;所述的上活动座与下活动座之间通过导滑杆形成相对滑动的活动连接结构,所述的上切皮刀具与下切皮刀具之间通过夹切驱动机构驱动上活动座与下活动座相对靠近来完成夹切动作。
10.进一步地,所述的上活动座上设置上切头刀具,所述的下活动座上设置下切头刀具,所述的上切头刀具与下切头刀具之间通过夹切驱动机构驱动上活动座与下活动座相对靠近来完成切头动作。
11.进一步地,所述的解剖掏挖装置包括剖切刀具、掏刮刀具和刀具驱动机构,所述的剖切刀具、掏刮刀具分别与刀具座形成相对转动的活动连接结构,所述的刀具驱动机构驱动剖切刀具相对于刀具座转动而完成剖切动作,再由掏刮刀具对剖切部位进行掏挖动作。
12.进一步地,所述的皮肉分离装置包括左夹爪、右夹爪及夹爪驱动机构,所述的左夹爪与右夹爪相对设置,所述的夹爪驱动机构安装在夹爪座上,且驱动左夹爪与右夹爪之间通过相对运动形成夹紧动作。
13.进一步地,所述的夹爪驱动机构包括左齿轮和右齿轮,在左齿轮上固定连接左导销,在右齿轮上固定连接右导销;所述的左夹爪通过第六连杆与左齿轮连接、通过第七连杆与夹爪座连接,且左夹爪、第六连杆、夹爪座、第七连杆之间共同形成平行四边形机构;所述的右夹爪通过第五连杆与右齿轮连接、通过第八连杆与夹爪座连接,且右夹爪、第五连杆、夹爪座、第八连杆之间共同形成平行四边形机构;所述的左齿轮与右齿轮之间形成啮合传动结构,且左齿轮通过左导销驱动第六连杆相对于夹爪座转动,右齿轮通过右导销驱动第五连杆相对于夹爪座转动。
14.进一步地,还包括送料机构,所述的送料机构包括送料管和送料推杆,所述的送料推杆通过传动杆与推板连接,所述的推板在送料管内腔所限定的范围内与送料管之间形成滑动配合结构。
15.与现有技术相比,本发明的有益效果是:在进行牛蛙宰杀加工作业时,先通过摆正定位装置对加工平台上的牛蛙进行姿态摆正,再通过夹切机构对摆正后的牛蛙进行颈项部环切作业,接下来通过解剖掏挖装置对环切后的牛蛙进行开膛去内脏作业,再由皮肉分离装置对开膛去内脏后的牛蛙进行剥皮作业,最后利用夹切机构对剥皮后的牛蛙进行头部去除作业,从而形成模块化的牛蛙宰杀加工作业方式,不仅自动化程度高,极大地降低了劳动强度,而且提高了牛蛙的宰杀质量和作业效率。
附图说明
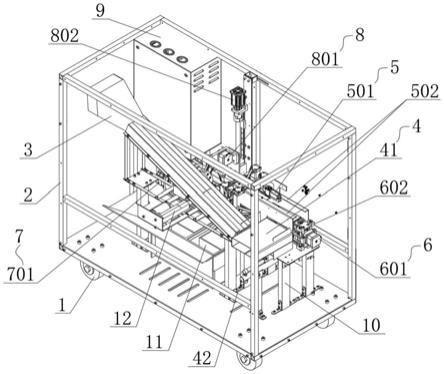
16.图1为本发明一种牛蛙自动宰杀加工设备的三维轴测图。
17.图2为图1所示的牛蛙自动宰杀加工设备的正视图。
18.图3为图1所示的牛蛙自动宰杀加工设备的俯视图。
19.图4为图1所示的牛蛙自动宰杀加工设备的侧视图。
20.图5为图1中的送料机构的正视图。
21.图6为图1中的送料机构的主视图。
22.图7为图1中的加工平台机构的三维轴测图(不含平台顶板)。
23.图8为图7所示的加工平台机构的主视图。
24.图9为图1中的加工平台机构的三维轴测图(含关闭状态的平台顶板)。
25.图10为图9所示的加工平台机构的主视图。
26.图11为图1中的加工平台机构的三维轴测图(含打开状态的平台顶板)。
27.图12为图11所示的加工平台机构的主视图。
28.图13为图1中的摆正定位装置的三维轴测图(含驱动部分)。
29.图14为图1中的摆正定位装置的三维轴测图(摆正初始状态)。
30.图15为图1中的摆正定位装置的三维轴测图(摆正最终状态)。
31.图16为图13所示的摆正定位装置的动作原理图(摆正初始状态)。
32.图17为图13所示的摆正定位装置的动作原理图(摆正最终状态)。
33.图18为图1中的夹切机构的三维轴测图(夹切初始状态)。
34.图19为图18所示的夹切机构的主视图。
35.图20为图18所示的夹切机构的侧视图(夹具处于松开状态)。
36.图21为图1中的夹切机构的三维轴测图(环切动作状态)。
37.图22为图21所示的夹切机构的主视图。
38.图23为图21所示的夹切机构的侧视图(夹具处于夹紧状态)。
39.图24为图1中的夹切机构的三维轴测图(切头动作状态)。
40.图25为图24所示的夹切机构的主视图。
41.图26为图24所示的夹切机构的侧视图。
42.图27为图1中的解剖掏挖装置的三维轴测图。
43.图28为图1中的解剖掏挖装置的主视图(初始状态)。
44.图29为图1中的解剖掏挖装置的主视图(最终状态)。
45.图30为图1中的解剖掏挖装置的俯视图。
46.图31为图1中的解剖掏挖装置的动作原理图(三维轴测图)。
47.图32为图31所示的解剖掏挖装置的主视图。
48.图33为图31所示的解剖掏挖装置的传动构造图(三维轴测图)。
49.图34为图31所示的解剖掏挖装置的剖视图。
50.图35为图1中的皮肉分离装置的三维轴测图。
51.图36为图35所示的皮肉分离装置的主视图(夹爪处于张开状态)。
52.图37为图35所示的皮肉分离装置的动作原理图(夹爪处于夹紧状态)。
53.图38为本发明一种牛蛙自动宰杀加工设备的收集机构的三维轴测图。
54.图39为图38所示的收集机构的俯视图。
55.图中标记:1-脚轮,2-机架,3-进料通道,4-送料机构,5-摆正定位装置,6-夹切机构,7-解剖掏挖装置,8-皮肉分离装置,9-电控系统,10-支撑架,11-废料收集箱,12-收集推杆,13-第一电机,14-第一丝杠,15-加工平台,16-第一滑台,17-牛蛙,18-平台中板,19-弹
簧座,20-第一底座,21-滑动座,22-平台顶板,23-顶板撑杆,24-合页,25-推料板,26-成品收集箱,41-送料管,42-送料推杆,43-推板,44-传动杆,45-挡片,501-摆正推杆,502-侧板,503-连接板,504-第一连杆,505-第一滑轨,506-第一滑块,507-第二连杆,508-第二滑块,509-第二滑轨,510-第三连杆,511-左后挡板,512-左前挡板,513-右后挡板,514-第三滑块,515-右前挡板,516-第四滑块,517-第四连杆,518-基座,601-夹切电机,602-齿轮座,603-上切皮刀具,604-上切头刀具,605-左齿条,606-上夹具,607-驱动齿轮,608-导滑杆,609-下夹具,610-下活动座,611-下切皮刀具,612-下切头刀具,613-右齿条,614-滚花螺母,615-上活动座,616-刀具微调孔,701-第二电机,702-弹簧,703-剖切刀具,704-掏刮刀具,705-解剖电机,706-引导滑轨,707-导滑销,708-导槽,709-承接板,710-刀具座,711-导轮,712-第一同步带,713-第二同步带,714-刀具挡片,715-套筒组件,716-第二丝杠,717-第二滑台,718-第二底座,719-第一带轮轴,720-第二带轮轴,801-夹皮电机,802-取皮电机,803-第三丝杠,804-夹爪座,805-第五连杆,806-左夹爪,807-右夹爪,808-第三底座,809-左齿轮,810-左导销,811-第六连杆,812-第七连杆,813-第八连杆,814-右导销,815-右齿轮,816-第三滑台。
具体实施方式
56.为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图和具体实施例对本发明进行详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
57.如图1、图2、图3、图4所示的牛蛙自动宰杀加工设备,主要包括机架2、送料机构4、摆正定位装置5、夹切机构6、解剖掏挖装置7以及皮肉分离装置8和加工平台15,所述机架2的底部安装有脚轮1,在机架2的中空内腔中安装有进料通道3、电控系统9和支撑架10,所述的进料通道3相对于机架2倾斜设置,以便进料通道3中的牛蛙得以在重力作用下沿着进料通道3滑落到送料机构4中。所述的加工平台15与第一滑台16固定连接,所述的第一滑台16与第一丝杠14形成丝杆传动机构,所述的第一丝杠14安装在第一底座20上,且第一丝杠14通过第一电机13来驱动,如图7、图8、图13所示。另外,在加工平台15的下方分别设置废料收集箱11和成品收集箱26,在成品收集箱26的上方设置收集推杆12,所述的收集推杆12固定安装在支撑架10上,所述的收集推杆12优选采用电动推杆,其动作输出端与推料板25连接,如图1、图38、图39所示。
58.所述送料机构4的具体结构如图5、图6所示,主要包括送料管41和送料推杆42,所述的送料推杆42通过传动杆44与推板43连接,在推板43的端部固定连接挡片45。所述的推板43在送料管41内腔所限定的范围内与送料管41之间形成滑动配合结构,所述的送料推杆42优选采用电动推杆,当进料通道3中的牛蛙滑落到送料管41中时,所述的送料推杆42通过传动杆44驱动推板43相对于送料管41滑动,直至送料管41中的牛蛙被推送出送料管41,此时,通过挡片45来封挡住进料通道3的出口,可以阻止进料通道3中的牛蛙持续滑落到送料管41中。
59.从送料管41被推出的牛蛙落到加工平台15上,如图7、图8所示,由摆正定位装置5对加工平台15上的牛蛙17进行姿态摆正。所述摆正定位装置5的构造如图1-3、图13、图14、图15所示,主要包括平台顶板22、左前挡板512、右前挡板515、左后挡板511以及右后挡板
513和摆正驱动机构,在加工平台15的相对两侧、以相互平行方式设置有两块侧板502,所述的左前挡板512与右前挡板515相对设置,所述的左后挡板511与右后挡板513相对设置,所述的左后挡板511、右后挡板513优选采用l形结构,且左后挡板511与右后挡板513之间形成u形结构。所述的平台顶板22与加工平台15之间形成相对翻转运动的活动连接结构,通常,所述的平台顶板22通过合页24与加工平台15连接,如图9、图10所示。
60.所述的摆正驱动机构包括摆正推杆501和连接板503,所述的摆正推杆501固定安装在基座518上,其动作输出端与连接板503连接。所述的摆正推杆501优选采用电动推杆,且通过摆正推杆501来驱动连接板503相对于加工平台15作直线运动。当摆正驱动机构通过摆正推杆501进行摆正动作时,所述的左前挡板512与右前挡板515之间相对于加工平台15形成纵向夹持动作,以对加工平台15上的牛蛙17进行纵向姿态摆正,所述的左后挡板511、右后挡板513分别相对于加工平台15同步形成横向推送动作,以对加工平台15上的牛蛙17进行横向姿态摆正,并使牛蛙17的头部能够更好地被推送到夹切机构6中。此处的同步形成横向推送动作,是指横向推送动作与纵向夹持动作同步发生。其中,如图14、图16所示为摆正初始状态,如图15、图17所示为摆正最终状态,以便后续的夹切、去皮等宰杀作业。具体地,
61.如图13-17所示,所述的左前挡板512与第一滑块506固定连接,所述的第一滑块506与第一连杆504一端之间形成相对转动的活动连接结构,所述的右前挡板515与第四滑块516固定连接,所述的第四滑块516与第四连杆517一端之间形成相对转动的活动连接结构,所述第一连杆504的另一端、第四连杆517的另一端分别与连接板503之间形成相对转动的活动连接结构,所述的第一滑块506、第四滑块516分别与第一滑轨505形成滑动配合结构;当摆正推杆501通过连接板503进行摆正动作时,所述的第一滑块506带动左前挡板512、第四滑块516带动右前挡板515沿第一滑轨505同步相对靠拢。同样地,所述的左后挡板511与第二滑块508固定连接,所述的第二滑块508与第二连杆507一端之间形成相对转动的活动连接结构,所述的右后挡板513与第三滑块514固定连接,所述的第三滑块514与第三连杆510一端之间形成相对转动的活动连接结构,所述第二连杆507的另一端、第三连杆510的另一端分别与连接板503之间形成相对转动的活动连接结构,所述的第二滑块508、第三滑块514分别与第二滑轨509形成滑动配合结构;当摆正推杆501通过连接板503进行摆正动作时,所述的第二滑块508带动左后挡板511、第三滑块514带动右后挡板513沿第二滑轨509同步相对靠拢。
62.当处于加工平台15上的牛蛙17的头部被推送到夹切机构6上后,通过夹切机构6可以对摆正后的牛蛙17进行颈项部环切作业。如图18、图19、图20所示,所述的夹切机构6包括上活动座615、下活动座610和夹切驱动机构,所述的上活动座615上设置上切皮刀具603、上切头刀具604和上夹具606,所述的下活动座610上设置下切皮刀具611、下切头刀具612和下夹具609,所述的上切皮刀具603与下切皮刀具611相对设置,所述的上切头刀具604与下切头刀具612相对设置,所述的上夹具606与下夹具609相对设置。所述的夹切驱动机构包括齿轮座602和驱动齿轮607,所述的齿轮座602与导滑杆608之间形成相对滑动的活动连接结构,所述的驱动齿轮607安装在齿轮座602上,且驱动齿轮607的相对两侧分别与左齿条605、右齿条613形成啮合传动结构,所述的左齿条605与下活动座610固定连接,所述的右齿条613与上活动座615固定连接,所述的上活动座615与下活动座610之间通过导滑杆608形成
相对滑动的活动连接结构。
63.所述的驱动齿轮607通过夹切电机601驱动,当加工平台15上的牛蛙17被推送到夹切机构6上后,首先,通过夹切驱动机构来驱动上活动座615与下活动座610相对靠近,直至上夹具606与下夹具609相互靠近、并完成对牛蛙17的头部的夹持动作;然后,由夹切驱动机构继续驱动上活动座615与下活动座610相对靠近,以使得上切皮刀具603与下切皮刀具611之间进一步地相对靠近,进而上切皮刀具603与下切皮刀具611相互配合形成环切动作,直至夹切机构6对被上夹具606与下夹具609配合夹紧摆正后的牛蛙17的颈项部完成环切作业,如图21、图22、图23所示。
64.为了方便对上切皮刀具603、下切皮刀具611进行适度调整,以保证和提高牛蛙17的颈项部的环切作业质量和作业效率,可以将上切皮刀具603与上活动座615之间通过滚花螺母614形成可拆卸的活动连接结构,同样地,将下切皮刀具611与下活动座610之间也通过滚花螺母614形成可拆卸的活动连接结构。进一步地,还可以在上活动座615上开设刀具微调孔616,所述的上切皮刀具603通过滚花螺母614在刀具微调孔616所限定的范围内活动而相对于上活动座615伸出或者缩进;同样地,也可以在下活动座610上开设刀具微调孔616,所述的下切皮刀具611通过滚花螺母614在刀具微调孔616所限定的范围内活动而相对于下活动座610伸出或者缩进,如图19所示。其中,所述的刀具微调孔616优选采用直条形通孔,其相对两端形成弧形过渡结构。
65.经过夹切机构6对牛蛙17的颈项部完成环切作业后,再通过解剖掏挖装置7对环切后的牛蛙17进行开膛去内脏作业。如图27、图28、图30所示,所述的解剖掏挖装置7主要包括剖切刀具703、掏刮刀具704和刀具驱动机构,所述的剖切刀具703通过第一带轮轴719与刀具座710之间形成相对转动的活动连接结构,所述的掏刮刀具704通过第二带轮轴720与刀具座710之间形成相对转动的活动连接结构。其中,如图31、图32、图33、图34所示,所述的剖切刀具703优选采用圆盘状锯齿结构刀具,所述的掏刮刀具704的截面形状为星条状扇叶结构,且其上的刀片的截面形状为v字形;进一步地,在掏刮刀具704上的刀片的末端开设条形槽。
66.所述的刀具驱动机构包括解剖电机705,所述的剖切刀具703与掏刮刀具704之间通过第二同步带713形成带传动结构,所述的解剖电机705通过第一同步带712与第二带轮轴720之间形成带传动结构,由解剖电机705来驱动剖切刀具703与掏刮刀具704同步转动。如图27、图28、图29、图30所示,所述的刀具座710分别与导轮711、导滑销707连接,所述的导轮711与倒l形结构的引导滑轨706配合,所述的刀具座710通过导轮711相对于引导滑轨706运动而形成倒l形运动轨迹。所述的导滑销707与承接板709之间形成相对滑动的活动连接结构,通常,所述的承接板709上开设条形结构的导槽708,所述的导滑销707在导槽708所限定的范围内相对于承接板709直线滑动。所述的承接板709通过承接板驱动机构来带动刀具座710相对于引导滑轨706运动而形成倒l形运动轨迹。其中,所述的承接板驱动机构包括第二电机701、第二滑台717和第二丝杠716,所述的第二滑台717与承接板709之间通过套筒组件715连接,所述的第二丝杠716与第二滑台717之间形成丝杆传动机构,所述的第二丝杠716安装在第二底座718上,且第二丝杠716通过第二电机701来驱动。如图2、图10、图12、图29所示,所述加工平台15的底端安装弹簧座19和滑动座21,所述的弹簧座19与加工平台15固定连接,所述的滑动座21与加工平台15之间形成相对滑动的活动连接结构,在弹簧座19
与滑动座21之间设置弹簧702,所述的弹簧702套接在滑动座21的滑动杆上。
67.当解剖掏挖装置7对加工平台15上的牛蛙17进行解剖、掏挖内脏作业时,如图28所示,所述刀具座710的初始位置为引导滑轨706最左侧,此时的刀具座710为近似竖直状态。启动解剖电机705,使得剖切刀具703、掏刮刀具704处于同步转动状态。所述的第二电机701驱动第二丝杠716同步转动,第二丝杠716驱动第二滑台717相对于第二底座718从左向右直线运动,所述的第二滑台717带动承接板709同步运动,从而使刀具座710相对于引导滑轨706运动而形成倒l形运动轨迹。在此运动过程中,刀具座710逐步由近似竖直状态变为水平状态,所述的剖切刀具703相对于刀具座710转动,先接触牛蛙17的腹部,再向前运动以剖开腹部,从而完成剖切开膛作业;在已剖开腹部处,由掏刮刀具704对剖切部位进行掏挖动作,从而完成牛蛙去内脏作业。被掏挖出来的内脏在脱离牛蛙本体后,直接落到废料收集箱11中进行收集。为了防止内脏等杂物飞溅而造成污染,可以在刀具座710上设置刀具挡片714,所述的刀具挡片714为弧形结构件,且与剖切刀具703相对,如图32、图34所示。
68.经过开膛去内脏处理后的牛蛙17,再通过皮肉分离装置8进行剥皮作业。如图35、图36所示,所述的皮肉分离装置8主要包括左夹爪806、右夹爪807及夹爪驱动机构,所述的夹爪驱动机构安装在夹爪座804上,所述的左夹爪806与右夹爪807相对设置,且驱动左夹爪806与右夹爪807之间通过相对运动形成夹紧动作。所述的夹爪座804与第三滑台816固定连接,所述的第三滑台816与第三丝杠803之间形成丝杆传动机构,所述的第三丝杠803安装在第三底座808上,且第三丝杠803通过取皮电机802来驱动。具体地,
69.如图37所示,所述的夹爪驱动机构主要包括左齿轮809、右齿轮815和夹皮电机801,在左齿轮809上固定连接左导销810,在右齿轮815上固定连接右导销814;所述的左夹爪806通过第六连杆811与左齿轮809连接、通过第七连杆812与夹爪座804连接,且左夹爪806、第六连杆811、夹爪座804、第七连杆812之间共同形成平行四边形机构;所述的右夹爪807通过第五连杆805与右齿轮815连接、通过第八连杆813与夹爪座804连接,且右夹爪807、第五连杆805、夹爪座804、第八连杆813之间共同形成平行四边形机构;所述的左齿轮809与右齿轮815之间形成啮合传动结构,且左齿轮809通过左导销810驱动第六连杆811相对于夹爪座804转动,右齿轮815通过右导销814驱动第五连杆805相对于夹爪座804转动。
70.当皮肉分离装置8进行剥皮作业时,所述的取皮电机802通过第三丝杠803驱动第三滑台816相对于第三底座808向下滑动,直至第三滑台816带动夹爪座804向下运动至指定加工位,再通过夹皮电机801驱动左齿轮809或者右齿轮815转动,所述的左齿轮809通过左导销810驱动第六连杆811相对于夹爪座804逆时针转动,所述的右齿轮815通过右导销814驱动第五连杆805相对于夹爪座804顺时针转动,直至左夹爪806与右夹爪807之间通过相对运动形成夹紧动作,由此可以实现对牛蛙皮的夹紧作业。为了保证对牛蛙皮的夹紧更加可靠,以保证和提高后续的取皮作业,所述左夹爪806的工作面形成锯齿形结构,所述右夹爪807的工作面形成锯齿形结构。当左夹爪806与右夹爪807相互配合夹紧牛蛙皮后,所述的取皮电机802通过第三丝杠803驱动第三滑台816相对于第三底座808向上滑动,所述的第三滑台816带动夹爪座804向上运动,直至牛蛙皮与牛蛙肉完全分离,从而实现牛蛙剥皮功能。
71.对于剥皮后的牛蛙,再利用夹切机构6对其进行头部去除作业。具体地,如图9、图10、图11、图12所示,所述的加工平台15与平台中板18之间形成相对滑动的活动连接结构,所述的平台中板18通过顶板撑杆23与平台顶板22形成活动连接结构,所述的顶板撑杆23优
选采用l形结构件。当平台中板18相对于加工平台15滑动时,所述的平台中板18可以通过顶板撑杆23驱动平台顶板22相对于加工平台15关闭或者打开。当平台顶板22相对于加工平台15关闭时,所述的平台顶板22与加工平台15所形成的空间有助于牛蛙的姿态摆正作业。如图29所示,当承接板709接触并驱动滑动座21向右运动时,所述的滑动座21驱动平台中板18相对于加工平台15向右运动,以使顶板撑杆23得以驱动平台顶板22相对于加工平台15打开,确保夹切机构6对剥皮后的牛蛙进行头部切除作业。与此同时,所述的滑动座21也相对于弹簧座19不断靠近,从而使得弹簧702不断被压缩,直至平台顶板22相对于加工平台15完全打开。启动夹切电机601,由夹切驱动机构继续驱动上活动座615与下活动座610相对靠近,以使得上切头刀具604与下切头刀具612之间相对靠近,直至对剥皮后的牛蛙17的头部完成切除动作,如图24、图25、图26所示。被切掉头部后的牛蛙肉被收集推杆12通过推料板25推送,并落入到成品收集箱26中进行收集。最后,当加工平台15回到初始位置后,通过夹皮电机801的反向动作来使左夹爪806与右夹爪807之间相互分离,以便被夹紧的牛蛙皮得以落入指定的收集槽中。
72.本发明通过模块化设计,实现了从活蛙送料、姿态摆正、夹头环切、开膛去内脏、去皮、去头、分类收集的一体化宰杀加工流程,具有自动化程度高、占用空间小等优点。其中,通过摆正定位装置5对牛蛙进行姿态摆正,并采用夹切机构6对牛蛙进行柔性固定,不仅结构简单、合理,而且定位精度高;通过加工平台15多工位往复的加工方式,利用解剖掏挖装置7对牛蛙进行开膛、去内脏作业,且在开膛后及时去除内脏,极大地简化了宰杀加工流程,提高了牛蛙宰杀质量和作业效率。
73.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,应当指出的是,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有1条留言
-
 0访客 来自[中国] 2023年08月12日 05:02该设备量产没有?什么时候能买到该产品?
0访客 来自[中国] 2023年08月12日 05:02该设备量产没有?什么时候能买到该产品?
1