一种全自动制作鸡蛋仔的装置的制作方法
1.本实用新型涉及自动售买行业技术领域,具体为一种全自动制作鸡蛋仔的装置。
背景技术:
2.蛋仔机是制作蛋仔的机器,蛋仔机做出来的蛋仔口味外脆内软,入口细腻,奶味十足,得到儿童及老年人的喜爱,蛋仔在五十年代出现在中国香港地区,经过几十年的发展已经遍布全国,制作蛋仔的机器是一个小小的圆形连缀而成的不规则形状容器,将面粉和鸡蛋放入容器内,在将原材料置入该模具内,待模具置满以后,闭上模具进行烘烤,大约两三分钟,就可以食用,鸡蛋仔是中国香港地区地道街头小吃之一,中国台湾地区称为鸡蛋糕、鸡蛋饼,20世纪50年代出现在中国香港地区,凭借酥脆香甜的口感很快就征服了人们,遍布中国香港地区的大街小巷,鸡蛋仔制作简单,以鸡蛋、砂糖、面粉、淡奶等造成汁液,倒在两块特制蜂巢状铁制模版的中间,放在火上烤成;倒出来的鸡蛋仔呈金黄色,有蛋糕的香味,加上中间是半空的,咬下时口感特别弹牙。
3.鸡蛋仔在进行售卖的时候,均采用的人工制作,人工操作的时候会增强人工的劳动强度,而且一人进行操作的时候,需要点单又需要制作和打包,会耗费较多的时间,造成生产效率低下,卫生得不到保证,人工生产成本较高,而且人工长期制作的话,效率会越来越低。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种全自动制作鸡蛋仔的装置,解决了人工操作的时候会增强人工的劳动强度,生产效率低下,卫生得不到保证,人工生产成本较高的问题。
5.为实现以上目的,本实用新型通过以下技术方案予以实现:一种全自动制作鸡蛋仔的装置,包括顶板,所述顶板顶部一侧的前后均设置有烤盘翻转机构,并且顶板顶部中部的正面固定连接有出液装置,所述顶板的顶部且位于出液装置的后方固定连接有机器人,所述顶板顶部一侧的正面固定连接有盘子存放框,所述顶板的顶部且位于盘子存放框的后方固定连接有出料机构;
6.所述烤盘翻转机构包括烤盘支座、第一导轨后座、第一导轨前座、第二导轨后座和第二导轨前座,所述烤盘支座的内部设置有烤盘支座轴,并且烤盘支座轴的一端固定连接有连接块,所述连接块的顶部固定连接有打开翻转头烤盘连接板,所述打开翻转头烤盘连接板一侧的顶部与底部分别转动连接有上烤盘和下烤盘,所述出料机构包括垫块、电机座和轴承座,所述垫块的顶部固定连接有线性导轨,并且线性导轨的顶部滑动连接有承接盘。
7.优选的,所述第一导轨前座的顶部固定连接有第一步进电机,并且第一导轨后座的顶部固定连接有第一减速器机座,所述第一减速器机座的一侧固定连接有第二步进电机,并且第二步进电机的输出端通过联轴器固定连接有减速器,所述减速器的输出端固定连接有打开翻转头,所述打开翻转头的一侧贯穿打开翻转头烤盘连接板并延伸至其内部。
8.优选的,所述第二导轨前座的一侧固定连接有第三步进电机,并且第二导轨后座的顶部固定连接有第二减速器机座,所述第二减速器机座的一侧固定连接有第四步进电机,并且第四步进电机输出端通过减速器固定连接有翻转头,所述翻转头的一侧固定连接有烤盘定位块。
9.优选的,所述第一导轨前座与第一导轨后座相对的一侧之间、第二导轨前座与第二导轨后座相对的一侧之间均固定连接有导向轴,所述第一导轨前座与第一导轨后座的正面之间、第二导轨前座与第二导轨后座的正面之间均固定连接有第一感应器安装条。
10.优选的,所述第一感应器安装条表面的两侧均固定连接有感应器安装板,所述感应器安装板的表面固定连接有第一传感器,并且第一传感器的顶部设置有感应板。
11.优选的,所述第一减速器机座和第二减速器机座的一侧均固定连接有第二感应器安装条,并且第二感应器安装条的表面设置有第二传感器。
12.优选的,所述电机座的一侧固定连接有第五步进电机,并且轴承座的内部设置有从动轴,所述第五步进电机的输出端与从动轴的一端均固定连接有同步轮,并且两个同步轮的表面之间传动连接有皮带,所述皮带的顶部与承接盘的底部相连接所述垫块顶部的两侧均固定连接有防撞块,并且垫块的一侧固定连接有第三感应器安装条,所述第三感应器安装条的一侧固定连接有第三传感器。
13.优选的,所述出液装置包括出液机和放置架,所述放置架的底部设置有底座,并且放置架顶部的两侧均开设有放置槽,所述机器人包括六轴机器人,所述六轴机器人的顶部固定连接有机器人头部,并且六轴机器人的一侧设置有电动夹爪,所述电动夹爪的一侧设置有电动夹爪治具。
14.优选的,所述顶板底部的一侧固定连接有机器人控制器,并且顶板底部的另一侧设置有冰箱,所述机器人控制器的一侧固定连接有真空泵,并且顶板的顶部设置有取杯器。
15.优选的,所述冰箱的底部固定连接有底板,并且底板和机器人控制器的顶部均固定连接有万向轮,所述顶板的顶部且位于出料机构的一侧固定连接有风扇。
16.有益效果
17.本实用新型提供了一种全自动制作鸡蛋仔的装置。与现有技术相比具备以下有益效果:
18.(1)、该全自动制作鸡蛋仔的装置,通过顶板顶部一侧的前后均设置有烤盘翻转机构,并且顶板顶部中部的正面固定连接有出液装置,顶板的顶部且位于出液装置的后方固定连接有机器人,顶板顶部一侧的正面固定连接有盘子存放框,顶板的顶部且位于盘子存放框的后方固定连接有出料机构,烤盘翻转机构包括烤盘支座、第一导轨后座、第一导轨前座、第二导轨后座和第二导轨前座,烤盘支座的内部设置有烤盘支座轴,并且烤盘支座轴的一端固定连接有连接块,连接块的顶部固定连接有打开翻转头烤盘连接板,打开翻转头烤盘连接板一侧的顶部与底部分别转动连接有上烤盘和下烤盘,使用六轴机械臂代替人手制作,鸡蛋仔采用烤盘翻转机构进行烘烤,可以使得鸡蛋仔受热均匀,提高鸡蛋仔加工的质量,可全自动完成鸡蛋仔的制作全程无人工参与,效率明显提升,大大的降低了客户的生产成本和卫生的需求。
19.(2)、该全自动制作鸡蛋仔的装置,通过机器人包括六轴机器人,六轴机器人的顶部固定连接有机器人头部,并且六轴机器人的一侧设置有电动夹爪,电动夹爪的一侧设置
有电动夹爪治具,六轴机器人配合使用,可以做到无人全自动生产,这个主设备不但提高生产效率,还可以24小时处于销售状态,自动生产达到降低人力生产成本。
20.(3)、该全自动制作鸡蛋仔的装置,通过顶板底部的一侧固定连接有机器人控制器,并且顶板底部的另一侧设置有冰箱,机器人控制器的一侧固定连接有真空泵,并且顶板的顶部设置有取杯器,冰箱的底部固定连接有底板,并且底板和机器人控制器的顶部均固定连接有万向轮,顶板的顶部且位于出料机构的一侧固定连接有风扇,整体采用全自动的操作,客户自动点单,自动取餐,全程采用自动操作,可以提高整体的操作效率,给用户带来新奇的体验。
附图说明
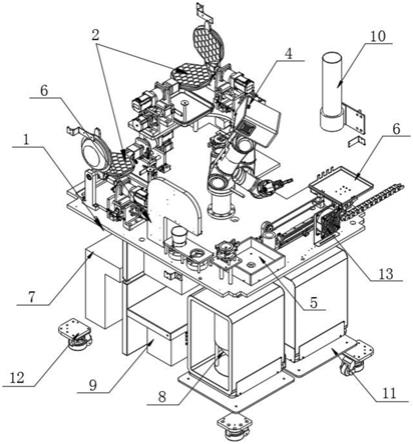
21.图1为本实用新型结构的立体图;
22.图2为本实用新型烤盘翻转机构的结构示意图;
23.图3为本实用新型第二步进电机的结构示意图;
24.图4为本实用新型第四步进电机的结构示意图;
25.图5为本实用新型出料机构的结构示意图;
26.图6为本实用新型机器人的结构示意图;
27.图7为本实用新型出液装置的结构示意图。
28.图中:1-顶板、2-烤盘翻转机构、21-烤盘支座、22-第一导轨后座、23
‑ꢀ
第一导轨前座、24-第二导轨后座、25-第二导轨前座、26-烤盘支座轴、27
‑ꢀ
连接块、28-打开翻转头烤盘连接板、29-上烤盘、210-下烤盘、211-第一步进电机、212-第一减速器机座、213-第二步进电机、214-打开翻转头、215
‑ꢀ
第三步进电机、216-第二减速器机座、217-第四步进电机、218-翻转头、219
‑ꢀ
烤盘定位块、220-导向轴、221-第一感应器安装条、222-感应器安装板、223
‑ꢀ
第一传感器、224-感应板、225-第二感应器安装条、226-第二传感器、3-出液装置、31-出液机、32-放置架、33-底座、34-放置槽、4-机器人、41-六轴机器人、42-机器人头部、43-电动夹爪、44-电动夹爪治具、5-盘子存放框、 6-出料机构、61-垫块、62-电机座、63-轴承座、64-线性导轨、65-承接盘、 66-第五步进电机、67-从动轴、68-同步轮、69-皮带、610-防撞块、611-第三感应器安装条、612-第三传感器、7-机器人控制器、8-冰箱、9-真空泵、 10-取杯器、11-底板、12-万向轮、13-风扇。
具体实施方式
29.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
30.请参阅图1-7,本实用新型提供一种技术方案:一种全自动制作鸡蛋仔的装置,包括顶板1,顶板1顶部一侧的前后均设置有烤盘翻转机构2,并且顶板1顶部中部的正面固定连接有出液装置3,顶板1的顶部且位于出液装置3 的后方固定连接有机器人4,顶板1顶部一侧的正面固定连接有盘子存放框5,顶板1的顶部且位于盘子存放框5的后方固定连接有出料机构6;
31.烤盘翻转机构2包括烤盘支座21、第一导轨后座22、第一导轨前座23、第二导轨后座24和第二导轨前座25,烤盘支座21的内部设置有烤盘支座轴 26,并且烤盘支座轴26的一端固定连接有连接块27,连接块27的顶部固定连接有打开翻转头烤盘连接板28,打开翻转头烤盘连接板28一侧的顶部与底部分别转动连接有上烤盘29和下烤盘210,出料机构6包括垫块61、电机座 62和轴承座63,垫块61的顶部固定连接有线性导轨64,并且线性导轨64的顶部滑动连接有承接盘65,鸡蛋仔采用烤盘翻转机构2进行烘烤,可以使得鸡蛋仔受热均匀,提高鸡蛋仔加工的质量,可全自动完成鸡蛋仔的制作全程无人工参与,效率明显提升,大大的降低了客户的生产成本和卫生的需求。
32.本实用新型中,第一导轨前座23的顶部固定连接有第一步进电机211,并且第一导轨后座22的顶部固定连接有第一减速器机座212,第一减速器机座212的一侧固定连接有第二步进电机213,并且第二步进电机213的输出端通过联轴器固定连接有减速器,减速器的输出端固定连接有打开翻转头214,打开翻转头214的一侧贯穿打开翻转头烤盘连接板28并延伸至其内部。
33.本实用新型中,第二导轨前座25的一侧固定连接有第三步进电机215,并且第二导轨后座24的顶部固定连接有第二减速器机座216,第二减速器机座216的一侧固定连接有第四步进电机217,并且第四步进电机217输出端通过减速器固定连接有翻转头218,翻转头218的一侧固定连接有烤盘定位块 219。
34.本实用新型中,第一导轨前座23与第一导轨后座22相对的一侧之间、第二导轨前座25与第二导轨后座24相对的一侧之间均固定连接有导向轴 220,第一导轨前座23与第一导轨后座22的正面之间、第二导轨前座25与第二导轨后座24的正面之间均固定连接有第一感应器安装条221。
35.本实用新型中,第一感应器安装条221表面的两侧均固定连接有感应器安装板222,感应器安装板222的表面固定连接有第一传感器223,并且第一传感器223的顶部设置有感应板224。
36.本实用新型中,第一减速器机座212和第二减速器机座216的一侧均固定连接有第二感应器安装条225,并且第二感应器安装条225的表面设置有第二传感器226。
37.本实用新型中,电机座62的一侧固定连接有第五步进电机66,并且轴承座63的内部设置有从动轴67,第五步进电机66的输出端与从动轴67的一端均固定连接有同步轮68,并且两个同步轮68的表面之间传动连接有皮带69,皮带69的顶部与承接盘65的底部相连接垫块61顶部的两侧均固定连接有防撞块610,并且垫块61的一侧固定连接有第三感应器安装条611,第三感应器安装条611的一侧固定连接有第三传感器612。
38.本实用新型中,出液装置3包括出液机31和放置架32,放置架32的底部设置有底座33,并且放置架32顶部的两侧均开设有放置槽34,机器人4 包括六轴机器人41,整体采用全自动的操作,客户自动点单,自动取餐,全程采用自动操作,可以提高整体的操作效率,给用户带来新奇的体验,电动夹爪43与六轴机器人41连接在一起,由六轴机器人41为电动夹爪42提供电和指令,六轴机器人41的顶部固定连接有机器人头部42,机器人头部42 有音箱和手机、充电宝,手机通过无线wifi与触摸一体机连接一起,手机主要目的是发出各种面部表情,音箱发出一些加工过程中的提示和播放音乐,充电宝为手机和音箱提供电能,客人通过触摸一体机上的界面付款后由,触摸一体机的程序发指令到plc,再由plc发指令到六轴机
器人41完成整过加工鸡蛋仔的过程,并且六轴机器人41的一侧设置有电动夹爪43,电动夹爪 43的一侧设置有电动夹爪治具44,电动夹爪治具44根据指令完成各作拿取动作,(需要到设备的各个地方拿取一些辅助治具配合一起使用),六轴机器人41配合使用,可以做到无人全自动生产,这个主设备不但提高生产效率,还可以24小时处于销售状态,自动生产达到降低人力生产成本。
39.本实用新型中,顶板1底部的一侧固定连接有机器人控制器7,并且顶板 1底部的另一侧设置有冰箱8,机器人控制器7的一侧固定连接有真空泵9,并且顶板1的顶部设置有取杯器10。
40.本实用新型中,冰箱8的底部固定连接有底板11,并且底板11和机器人控制器7的顶部均固定连接有万向轮12,顶板1的顶部且位于出料机构6的一侧固定连接有风扇13。
41.同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。
42.使用时,客人通过一体机扫码支付,启动鸡蛋仔机开始制作鸡蛋仔,(有两种口味可供选择),六轴机器人41从取杯器10取一次性水杯放到出液装置3指定的地方,一次性水杯被放置在放置架32上的放置槽34中,通过真空泵9从冰箱8中抽取蛋仔液放入一次性水杯中,六轴机器人41从放置架32 上取一次性水杯,并将蛋仔液均匀的倒到鸡蛋仔烤盘中,(如客户再次扫码支付可以倒入另一烤盘中),六轴机器人41将一次性托盘吸取到指定位置,当六轴机器人41的电动夹爪治具44上已装有鸡蛋仔液时,发信息给plc,plc 发信息到步进电机驱动器,步进电机驱动器再发令指给第一步进电机211移动指定位置后,到达指定第一传感器223发出信息给plc,plc再发信息到步进电机驱动器,步进电机驱动器发出指令到第二步进电机213,打开上烤盘 29,当上烤盘29打开到指定位置后,第二传感器226发信息到plc要求六轴机器人41将鸡蛋仔液倒至下烤盘210上,当六轴机器人41的上的鸡蛋仔液倒完后,六轴机器人41发信息给plc,plc发信息给步进电机驱动器,步进电机驱动器发指定给第二步进电机213要求闭合烤盘,当烤盘闭合后,第二传感器226发信给plc,plc要发信息给步进电机驱动器要求第一步进电机211 移动到原点,当第一步进电机211称动到原点后,第一传感器223发信息给 plc,plc再发信息给步进电机驱动器,指令步进电机c移动到提定位置后,传感器发信息给plc,plc再发信息给步进电机驱动器指令,第四步进电机217 翻转到指定动作,第四步进电机217完成指定动作后,发信息给plc,plc发信息给烤盘,要求烤盘烤一定时间,当烤盘烤的时间达到后,plc发出信息步进电机驱动器指令第三步进电机215移动回来原点,第二传感器226发信息给plc,plc发信息给步进电机驱动器指令,第二步进电机213移动到指定位置后,到达指定位置传感器发信息给plc、plc发信息给步进电机驱动器指令,第一步进电机211打开上烤盘,当上烤盘29到达指定位置后,第二传感器226 发信息给plc通知六轴机器人41取出已经烤好的鸡蛋仔,烤盘翻转机构2将鸡蛋仔制作完成,六轴机器人41拿起叉子,将鸡蛋仔叉起来,六轴机器人41 将鸡蛋仔成品叉到出料装置6,六轴机器人41从盘子存放框5取来盘子放在承接盘65上面,承接盘65上的第三传感器612接收到上面有物体的指令信息发到pcl,plc再发指令到步进电机驱动器,步进电机驱动器发指令给第五步进电机66移动的合适放已经完成的成型的鸡蛋仔位置上,当承接盘65移动的合适的位置后第三传感器612发出信息给plc,plc再发出指令给六轴机器人41,可以放下六轴机器人41治具上面的鸡蛋仔,当六轴机器人41放下鸡蛋仔后,再发信息给plc,pcl再发信息给步进电机驱动器,再让步进电机驱动器发出指令给第五步进电机66,第五步进电机66通过同步
轮68和皮带 69的带动,将承接盘65移动到客户可以拿到鸡蛋仔的位置,到达指定位置后,再由第三传感器612发信息到plc,当客人拿走鸡蛋仔后,承接盘65上的第三传感器612会发信息到plc,plc接后信息后,发指令到步进电机驱动器,要求第五步进电机66移动到原点位置,风扇13启动把鸡蛋仔吹到变脆,鸡蛋鸡仔变脆后,出料装置6输送到指定位置后,客户自拿取。
43.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
44.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1