具有细长线轴的自动系带鞋类的制作方法
具有细长线轴的自动系带鞋类
1.相关申请的交叉引用
2.本申请要求于2018年8月31日提交的美国临时申请序列号62/725672的优先权权益,其内容通过引用整体并入本文。
技术领域
3.本文公开的主题总体上涉及一种具有自动系带马达和管状线轴构件的鞋类物品。
附图说明
4.在附图的各个图中,通过举例而非限制的方式示出了一些实施例。
5.图1是在示例实施例中用于鞋类物品的机动系带系统的部件的分解图。
6.图2总体示出了示例实施例中的机动系带系统的部件的框图。
7.图3a
‑
3c分别是在示例实施例中结合有机动系带系统和细长线轴的鞋类物品的透视图、侧视图和俯视图。
8.图4a和4b是在示例实施例中解绕并缠绕在细长线轴上的多个鞋带的详细视图。
9.图5a和5b是在示例实施例中具有柔性的细长线轴的鞋类物品的图示。
10.图6是在示例实施例中具有包括多个离散直径的细长线轴的鞋类物品的图示。
11.图7是在示例实施例中具有包括多个直径的细长线轴的鞋类物品的图示。
12.图8a和8b分别示出了在示例实施例中具有单个细长线轴的鞋类物品的俯视图和侧视图。
具体实施方式
13.示例方法和系统针对一种具有自动系带马达和管状线轴构件的鞋类物品。示例仅代表可能的变型。除非另有明确说明,否则部件和功能是可选的,可以组合或细分,并且操作可以按顺序变化或者组合或细分。在下面的描述中,出于解释的目的,阐述了许多具体细节以提供对示例实施例的透彻理解。然而,对于本领域技术人员而言显而易见的是,可以在没有这些具体细节的情况下实践本主题。
14.诸如鞋之类的鞋类物品可包括常规的和非常规的各种部件。常规部件可包括鞋帮、鞋底和鞋带或其他固定机构,以将穿着者的脚封闭并固定在鞋类物品内。非常规地,机动系带系统可与鞋带接合以收紧和/或放松鞋带。附加或替代电子设备可以为鞋类物品提供各种功能,包括操作和驱动马达、感测与鞋类物品的性质有关的信息、提供发光的显示器和/或其他感官刺激等等。
15.通常,特别是对于面向体育活动的性能的鞋类物品,诸如鞋类物品的尺寸、形式、坚固性和重量之类的特征可能特别重要。通过拉紧一个鞋带、多个鞋带或其他拉紧构件将鞋类物品牢固地固定在脚上的能力可进一步增强耐磨性、舒适性和性能。通常,在鞋类的鞋帮的期望范围内提供足够的紧度可能是对自动系带鞋类和鞋类的特别挑战。
16.已经开发了自动系带鞋类,其试图通过使用细长线轴来在鞋带上分配张力。细长
线轴可以是管状的、圆锥形的,具有阶梯状的部分,或者可以是任何其他合适的形状。细长线轴可以定位在系带引擎的外部,但可以连接在系带引擎和与鞋帮接合的鞋带之间,以收紧鞋帮并将鞋类物品固定到穿着者的脚上。结果可能是在一个或多个鞋带上施加了均匀理想的张力并且在鞋帮上均匀地分配张力。
17.图1是在示例实施例中用于鞋类物品的机动系带系统的部件的分解图。尽管针对鞋类物品描述了该系统,但应当认识并理解,关于鞋类物品描述的原理同样适用于多种可穿戴物品中的任何一种。图1所示的机动系带系统100包括具有壳体结构103的系带引擎102、盖104、致动器106、中底板108、中底110和外底112。图1示出了自动系带鞋类平台的部件的基本组装顺序。机动系带系统100开始于将中底板108固定在中底内。接下来,将致动器106插入到中底板的与可嵌入外底112中的接口按钮相对的侧面中的开口中。接下来,将系带引擎102放入中底板108中。在一示例中,将系带系统100插入在鞋带缆线的连续环下,并且鞋带缆线与系带引擎102中的线轴对准(在下文中讨论)。最后,将盖104插入到中底板108中的凹槽中,固定到关闭位置,并闩锁到中底板108中的凹部中。盖104可以捕获系带引擎102并且可以在操作过程中帮助保持鞋带缆线的对准。鞋带线轴220(参见图2)位于盖104的下方。
18.图2总体上示出了示例性实施例中的机动系带系统100的部件的框图。系统100包括机动系带系统的某些(但不一定是全部)部件,比如包括接口按钮200、脚存在传感器202以及系带引擎壳体102,其包围具有处理器电路204的印刷电路板部件(pca)、电池206、接收线圈208光学编码器210,运动传感器212和驱动机构214。光学编码器210可包括光学传感器和具有可由光学传感器独立检测的不同部分的编码器。驱动机构214尤其可以包括马达216、传动装置218和鞋带线轴220。运动传感器212尤其可以包括单轴或多轴加速度计、磁力计、陀螺仪或者其他传感器或装置,其配置为感测壳体结构102或者壳体结构102内或联接至其的一个或多个部件的运动。在一示例中,机动系带系统100包括联接到处理器电路204的磁力计222。
19.在图2的示例中,处理器电路204与接口按钮200、脚存在传感器202、电池206、接收线圈208和驱动机构214中的一个或多个进行数据或电源信号通信。传动装置218将马达216联接至线轴以形成驱动机构214。在图2的示例中,按钮200、脚存在传感器202和环境传感器224示出为在系带引擎102的外部或部分地在其外部。
20.在一示例中,接收线圈208定位在系带引擎102的壳体103上或内部。在各种示例中,接收线圈208定位在壳体103的外部主表面(例如顶表面或底表面)上以及在特定示例中的底表面。在各种示例中,接收线圈208是qi充电线圈,但可以替代地使用任何合适的线圈,比如a4wp充电线圈。
21.在一示例中,处理器电路204控制驱动机构214的一个或多个方面。例如,处理器电路204可以配置为从按钮200和/或脚存在传感器202和/或运动传感器212接收信息,并响应于此而控制驱动机构214,以便围绕脚使鞋类变紧或变松。在一示例中,处理器电路204另外或可替代地配置为发出命令以从脚存在传感器202或其他传感器获得或记录传感器信息及其他功能。在一示例中,处理器电路204在以下方面调节驱动机构214的操作:(1)使用脚存在传感器202检测脚存在和(2)使用运动传感器212检测指定姿势。
22.来自环境传感器224的信息可用于更新或调整脚存在传感器202的基线或参考值。
如下文进一步解释,由电容性脚存在传感器测量的电容值可随时间变化,例如响应于传感器附近的环境条件。使用来自环境传感器224的信息,处理器电路204和/或脚存在传感器202可以更新或调整测量或感测的电容值。
23.图3a
‑
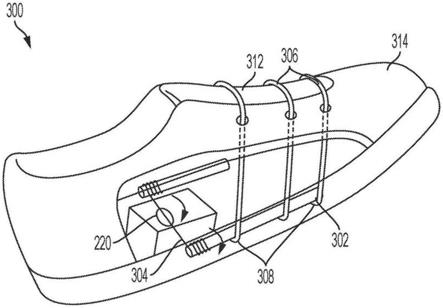
3c分别是在示例实施例中结合有机动系带系统100和细长线轴302的鞋类物品300的透视图、侧视图和俯视图。细长线轴302通过主鞋带304联接到鞋带线轴220,主鞋带在每一端固定到细长线轴302。细长线轴302安装在鞋类物品300内,使得它们可以绕其主轴线303自由旋转。
24.多个鞋带306沿着每个细长线轴302间隔开。多个鞋带306中的每一个具有固定到细长线轴302之一的第一端308和固定到另一细长线轴302的第二端310,使多个鞋带中的每个横跨鞋类物品300的鞋帮314的喉部312延伸。在各种示例中,多个鞋带306中的每个的第一和第二端308、310部分地通过缠绕在相应的细长线轴302上和部分地通过紧固、胶合、插入或以其他方式固定在细长线轴302上或内部而被固定。
25.为了收紧多个鞋带306,马达216(图2)运行并使鞋带线轴220转动,从而在主鞋带304上施加张力。由此,主鞋带304上的张力在细长线轴302上产生旋转力,从而使细长线轴302沿着它们各自的主轴线303旋转。随着细长线轴302旋转,张力被施加在多个鞋带306中的每个上,从而导致多个鞋带306在喉部312上收紧。
26.为了使多个鞋带306变松,马达216操作并导致鞋带线轴220沿与鞋带线轴216旋转的方向相反的方向旋转,以收紧多个鞋带306。然后,主鞋带304变得松弛,从而使细长线轴302从收紧多个鞋带306起沿其各自主轴线303在相反的方向上旋转,从而使多个鞋带306松弛。当穿着者将其脚从鞋类物品300上移开时,或者以其他方式在多个鞋带306上施加力,例如通过向鞋类物品300的舌头施加力或通过直接操纵多个鞋带306,多个鞋带306可能变得更加松弛,从而形成较大的开口以移开穿着者的脚。
27.图4a和4b是在示例实施例中解绕并缠绕在细长线轴302上的多个鞋带306的详细视图。在图4a中,多个鞋带306基本未缠绕,每个都在其各自的第一端308处固定到细长线轴302。当马达216操作并转动鞋带线轴220时,施加在细长线轴302上的旋转力导致多个鞋带306中的每个缠绕在细长线轴302上,如图4b所示。
28.图5a和5b是在示例实施例中具有柔性的细长线轴502的鞋类物品500的图示。鞋类物品500和细长线轴502可以与鞋类物品300和细长线轴302相同并且操作相同。然而,与细长线轴302(其可以由刚性和/或非挠性材料制成,比如塑料、金属等)相反,细长线轴502可以由诸如橡胶的柔性材料或者配置为在操作期间挠曲或弯曲的材料比如金属制成。这样做,细长线轴502可以符合鞋类物品500的轮廓。如图所示,细长线轴502可以基本遵循鞋类物品500的中底508的内侧曲线504和外侧曲线506。
29.图6是在示例实施例中具有包括多个离散直径的细长线轴602的鞋类物品600的图示。鞋类物品600和细长线轴602可以与鞋类物品300和细长线轴302相同并且操作相同。然而,细长线轴602包括多个段604、606、608,多个段604、606、608中的每个是直径彼此不同的离散段,多个段604、606、608的直径变化在每个段之间是突然的。如图所示,段604的直径大于段606的直径,段606的直径大于段608的直径。多个鞋带610中的每一个固定到多个段604、606、608中的一个。在所示的示例中,多个段604、606、608中的每一个仅对应于多个鞋带610中的一个。
30.因为细长线轴602绕主轴线603以恒定的速率旋转,所以多个鞋带610中的每一个具有不同的行程量,这归因于在多个段604、606、608中的相应一个中的相应直径不同。因此,缠绕在具有最大直径的段604上的鞋带610'将比缠绕在具有较小直径的段606上的鞋带610”具有更大的行程量。换句话说,细长线轴602的一圈缠绕或解绕的鞋带610'比鞋带610”更多。结果,可以通过选择多个段604、606、608中的每个的直径来定制多个鞋带610中的每个的束紧特性。
31.图7是在示例实施例中具有包括多个直径的细长线轴702的鞋类物品700的图示。鞋类物品700和细长线轴702可以与鞋类物品600和细长线轴602相同并且操作相同。然而,并非具有离散段604、606、608,细长线轴702是圆锥形的,因此沿细长线轴702的长度具有连续变化的直径。这样,细长线轴702具有多个段704、706、708,其对应于多个鞋带710分别位于的离散位置,但是多个段704、706、708是细长线轴702的直径连续变化的部分。
32.因为多个鞋带710中的每个绕细长线轴702的长度712缠绕,所以多个鞋带710中的每个上的扭矩随着单独的鞋带绕细长线轴702缠绕而变化。因此例如,鞋带710'开始于线轴702上的第一较大直径位置714,但随着线轴702旋转而逐渐沿长度712向下移动至第二较小直径位置716。因为鞋带710'所接合的细长线轴702的直径随着细长线轴702转动而持续减小,由线轴施加在鞋带710'上的扭矩不断减小。如图所示,多个鞋带710中的每个经历相同的扭矩减小,与如果多个鞋带710收紧时扭矩不减小的情况相比,可能在穿着者身上产生相对更柔软的紧缩感。
33.细长线轴602、702的原理可以组合在单个线轴中。因此,单个细长线轴可以包括直径逐渐变化的两个圆锥形部分和直径突然变化分离的离散部分。离散部分本身可能是圆锥形的,圆锥形部分之间会突然变化。
34.图8a和8b分别示出了在示例实施例中具有单个细长线轴802的鞋类物品800的俯视图和侧视图。细长线轴802可与本文公开的任何细长线轴相同,包括细长线轴302、502、602、702,或者可以是任何合适的配置。与细长线轴302、502、602、702一样,未示出的主鞋带使细长线轴802转动。如图所示,细长线轴802通常沿着鞋类物品800的中心线804定位,尽管应当认识并理解,细长线轴802可以定位在鞋类物品800的内侧806或外侧808上。
35.如在图8b的侧视图中所见,主鞋带810各自在两端处联接至细长线轴802。主鞋带810的每一端均与细长线轴802联接,使得细长线轴802的转动导致每个主鞋带810的两端绕着细长线轴802绕线或从其退线。这样,细长线轴802的旋转根据细长线轴802的旋转方向导致主鞋带810收紧或放松。
36.示例
37.在示例1中,一种鞋类物品包括:中底;相对于中底固定并形成喉部的鞋帮;横跨鞋帮的喉部延伸的多个鞋带;以及定位在中底内的机动系带系统,其配置成与主鞋带接合以增加和减小主鞋带上的张力,该机动系带系统包括:马达;鞋带线轴,其可操作地联接至马达,配置为基于马达的作用对主鞋带进行绕线和退线;以及细长线轴,主鞋带联接到该细长线轴,配置为基于马达的操作并经由主鞋带对多个鞋带线进行绕线和退线,多个鞋带中的每个沿着细长线轴彼此间隔开。
38.在示例2中,示例1的鞋类物品还可选地包括:细长线轴具有圆形横截面。
39.在示例3中,示例1和2中的任何一个或多个的鞋类物品还可选地包括:细长线轴具
有多个段,多个段中的每个具有不同的直径,并且其中,多个鞋带中的每个对应于多个段之一。
40.在示例4中,示例1
‑
3中的任何一个或多个的鞋类物品还可选地包括:多个段是离散段。
41.在示例5中,示例1
‑
4中的任何一个或多个的鞋类物品还可选地包括:细长线轴是圆锥形的。
42.在示例6中,示例1
‑
5中的任何一个或多个的鞋类物品还可选地包括:多个鞋带具有不同的长度。
43.在示例7中,示例1
‑
6中的任何一个或多个的鞋类物品还可选地包括:细长线轴是圆柱形的。
44.在示例8中,一种制造鞋类物品的方法包括:相对于鞋帮固定中底,鞋帮形成喉部;横跨鞋帮的喉咙延伸多个鞋带;以及将机动系带系统定位在中底内,该机动系带系统配置成与主鞋带接合以增加和减小主鞋带上的张力,该机动系带系统包括:马达;鞋带线轴,其可操作地联接至马达,配置为基于马达的作用对主鞋带进行绕线和退线;以及细长线轴,主鞋带联接到该细长线轴,配置为基于马达的操作并经由主鞋带对多个鞋带线进行绕线和退线,多个鞋带中的每个沿着细长线轴彼此间隔开。
45.在示例9中,示例8的方法还可选地包括:细长线轴具有圆形横截面。
46.在示例10中,示例8和9中的任何一个或多个的方法还可选地包括:细长线轴具有多个段,多个段中的每个具有不同的直径,并且其中,多个鞋带中的每个对应于多个段之一。
47.在示例11中,示例8
‑
10中的任何一个或多个的方法还可选地包括:多个段是离散段。
48.在示例12中,示例8
‑
11中的任何一个或多个的方法还可选地包括:细长线轴是圆锥形的。
49.在示例13中,示例8
‑
12中的任何一个或多个的方法还可选地包括:多个鞋带具有不同的长度。
50.在示例14中,示例8
‑
13中的任何一个或多个的方法还可选地包括:细长线轴是圆柱形的。
51.在示例15中,一种机动系带系统包括:马达;鞋带线轴,其可操作地联接至马达,配置为基于马达的作用对主鞋带进行绕线和退线;以及细长线轴,主鞋带联接到该细长线轴,配置为基于马达的操作并经由主鞋带对多个鞋带进行绕线和退线,多个鞋带中的每个沿着细长线轴彼此间隔开。
52.在示例16中,示例15的鞋类物品还可选地包括:细长线轴具有圆形横截面。
53.在示例17中,示例15和16中的任何一个或多个的鞋类物品还可选地包括:细长线轴具有多个段,多个段中的每个具有不同的直径,并且其中,多个鞋带中的每个对应于多个段之一。
54.在示例18中,示例15
‑
17中的任何一个或多个的鞋类物品还可选地包括:多个段是离散段。
55.在示例19中,示例15
‑
18中的任何一个或多个的鞋类物品还可选地包括:细长线轴
是圆锥形的。
56.在示例20中,示例15
‑
19中的任何一个或多个示例的鞋类物品还可选地包括:多个鞋带具有不同的长度。
57.在示例21中,示例15
‑
20中的任何一个或多个的鞋类物品还可选地包括:细长线轴是圆柱形的。
58.在整个说明书中,多个实例可以实现被描述为单个实例的部件、操作或结构。尽管将一种或多种方法的单独操作示出并描述为分开的操作,但可以同时执行一个或多个单独操作,并且不需要按照所示顺序执行操作。在示例配置中表示为分开的部件的结构和功能可以实现为组合的结构或部件。类似地,表示为单个部件的结构和功能可以实现为分开的部件。这些及其他变型、修改、添加和改进落入本文主题的范围内。
59.本文将某些实施例描述为包括逻辑或多个部件、模块或机制。模块可以构成软件模块(例如体现在机器可读介质上或传输信号中的代码)或硬件模块。“硬件模块”是能够执行某些操作的有形单元,并且可以以某种物理方式配置或布置。在各种示例实施例中,一个或多个计算机系统(例如独立计算机系统、客户端计算机系统或服务器计算机系统)或计算机系统的一个或多个硬件模块(例如处理器或一组处理器)可以通过软件(例如应用程序或应用程序部分)配置为操作成执行本文所述的某些操作的硬件模块。
60.在一些实施例中,可以机械地、电子地或其任何合适的组合来实现硬件模块。例如,硬件模块可以包括永久性地配置为执行某些操作的专用电路或逻辑。例如,硬件模块可以是专用处理器,例如现场可编程门阵列(fpga)或asic。硬件模块还可以包括可编程逻辑或电路,其由软件临时配置为执行某些操作。例如,硬件模块可以包括包含在通用处理器或其他可编程处理器内的软件。将意识到,在成本和时间方面考虑可以决定在专用且永久配置的电路中或在临时配置的电路(例如由软件配置)中机械地实现硬件模块。
61.相应地,短语“硬件模块”应被理解为包括有形实体,是物理地构造、永久地配置(例如硬接线)或临时地配置(例如编程)以某种方式操作或执行本文所述的某些操作的实体。如本文所用,“硬件实现的模块”是指硬件模块。考虑到其中硬件模块被临时配置(例如编程)的实施例,每个硬件模块不需要在时间的任何一个实例配置或实例化。例如,在硬件模块包括由软件配置为成为专用处理器的通用处理器的情况下,该通用处理器可以在不同时间分别配置为不同的专用处理器(例如包括不同的硬件模块)。软件可以相应地配置处理器,例如以在时间的一个实例构成特定的硬件模块,并在时间的不同实例构成不同的硬件模块。
62.硬件模块可以向其他硬件模块提供信息并从其接收信息。因此,所描述的硬件模块可被认为是通信耦合的。在同时存在多个硬件模块的情况下,可以通过在两个或更多个硬件模块之间的信号传输(例如通过适当的电路和总线)来实现通信。在其中在不同时间配置或实例化多个硬件模块的实施例中,可以例如通过在多个硬件模块可以访问的存储器结构中存储和检索信息来实现这种硬件模块之间的通信。例如,一个硬件模块可以执行操作并将该操作的输出存储在其通信耦合到的存储设备中。然后,另一硬件模块可以在以后的时间访问存储设备以检索和处理所存储的输出。硬件模块还可以发起与输入或输出设备的通信,并且可以在资源(例如信息的集合)上操作。
63.本文描述的示例方法的各种操作可以至少部分地由一个或多个临时配置(例如通
过软件)或永久配置为执行相关操作的处理器来执行。无论是临时配置还是永久配置,这样的处理器都可以构成处理器实现的模块,其操作成执行本文所述的一个或多个操作或功能。如本文所用,“处理器实现的模块”是指使用一个或多个处理器实现的硬件模块。
64.类似地,本文描述的方法可以至少部分地由处理器实现,处理器是硬件的示例。例如,一种方法的至少一些操作可以由一个或多个处理器或处理器实现的模块执行。此外,一个或多个处理器还可在“云计算”环境中或作为“软件即服务”(saas)来支持相关操作的性能。例如,至少一些操作可以由一组计算机(作为包括处理器的机器的示例)执行,这些操作可以通过网络(例如互联网)和一个或多个适当的接口(例如应用程序接口(api))访问。
65.某些操作的性能可以分布在一个或多个处理器之间,不仅驻留在单个计算机内,而且可以跨多个计算机部署。在一些示例实施例中,一个或多个处理器或处理器实现的模块可以位于单个地理位置(例如在家庭环境、办公室环境或服务器场内)。在其他示例实施例中,一个或多个处理器或处理器实现的模块可以分布在多个地理位置上。
66.本说明书的某些部分是根据对以机器存储器(例如计算机存储器)中的位或二进制数字信号存储的数据操作的算法或符号表示的方式呈现的。这些算法或符号表示是数据处理领域的普通技术人员用来将其工作的实质传达给本领域其他技术人员的技术的示例。如本文所用,“算法”是导致期望结果的操作或类似处理的自洽序列。在这种情况下,算法和操作涉及对物理量的物理操纵。通常,但并非必须,这些量可以采取能够由机器存储、访问、传输、组合、比较或以其他方式操纵的电、磁或光信号的形式。主要出于通用目的,有时方便使用诸如“数据”、“内容”、“位”、“值”、“元素”、“符号”、“字符”、“术语”、“数量”、“数字”等之类的词来引用此类信号。然而,这些词语仅是方便的标签,并且应与适当的物理量相关。
67.除非另有明确说明,否则本文中使用“处理”、“计算”、“确定”、“表示”、“显示”等词语进行的讨论可能是指机器(例如计算机)的动作或过程,其操纵或转换表示为一个或多个存储器(例如易失性存储器、非易失性存储器或其任意合适的组合)、寄存器或者接收、存储、传输或显示信息的其他机器部件内的物理(例如电、磁或光)量的数据。此外,除非另有明确说明,否则如专利文件中共同的,术语“一”或“一个”在本文中用于包括一个或多个实例。最后,除非另有明确说明,否则如本文所用,连词“或”是指非排他性的“或”。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1