双平行四边形RCM机构及具有该机构的微创手术机器人的制作方法
双平行四边形rcm机构及具有该机构的微创手术机器人
技术领域
1.本发明涉及一种机械设备,具体是关于一种双平行四边形rcm机构及具有该机构的微创手术机器人。
背景技术:
2.目前,微创手术机器人已广泛用于帮助医生完成更精细的手术,不仅可以辅助减少医生的工作量,同时可以减小医生手术时由于疲劳或手部震颤造成手术影响,另外还具有手术损伤小、愈合快等优势。例如,美国的达芬奇微创手术机器人系统(da vinci surgery robot system)已在临床广泛应用。
3.在腹腔镜微创手术机器人技术中,一个极其重要的部分就是它的rcm(remote center of motion,远端运动中心)机构。rcm机构的作用在于提供一个远端运动中心点,该远端运动中心点可以始终与微创手术切口重合,可确保在微创手术过程中手术器械与病人的手术切口不发生拉扯,从而保证手术安全。由于rcm机构的特点恰好与微创手术的操作特征相吻合,因此它在微创手术机器人中获得巨大成功。
4.当前主流的微创手术机器人rcm机构均采用双平行四边形机构,此种双平行四边形rcm机构原理简单,但要想实现或具有可用性需要克服一些应用上的困难,例如如何实现两自由度相关关节之间的平衡、阻尼及锁止等功能。
技术实现要素:
5.针对上述问题,本发明的其中一个目的是提供一种双平行四边形rcm机构,该rcm机构具有方便、易用、安全的特性;本发明的另一个目的是提供一种具有该双平行四边形rcm机构的微创手术机器人。
6.为实现上述目的,本发明采取以下技术方案:一种双平行四边形rcm机构,包括随停旋转关节和双平行四边形杆系;所述随停旋转关节与所述双平行四边形杆系的输入端关联;所述双平行四边形杆系的输出端与外部的手术执行机构关联,以使所述手术执行机构的轴线始终通过所述双平行四边形杆系的rcm点;在所述随停旋转关节与所述双平行四边形杆系的输入端之间设置有第一锁紧机构,用于锁紧或解锁所述随停旋转关节与所述双平行四边形杆系之间的旋转副;在所述双平行四边形杆系的至少一个铰接关节上设置有第二锁紧机构,用于锁紧或解锁形成该铰接关节的两杆件之间的旋转副。
7.所述的双平行四边形rcm机构,优选地,所述随停旋转关节包括弹簧助力机构,所述弹簧助力机构包括:安装部;转动连接部,与所述双平行四边形杆系的输入端固定连接或一体成形,且所述转动连接部的旋转轴线同时平行于所述安装部和双平行四边形杆系的输入端的长度方向;限位部,设置在所述安装部内;弹性部,通过所述限位部限制在所述安装部内;阻挡部,设置在所述转动连接部上;当外力驱动所述双平行四边形杆系相对于所述随停旋转关节转动时,所述阻挡部随着所述转动连接部的转动压缩所述弹性部,所述弹性部由此产生与外力相当的反作用力,以达到力平衡。
8.所述的双平行四边形rcm机构,优选地,所述转动连接部通过轴承转动安装在所述安装部内,所述弹性部为扭簧,所述扭簧套设在所述转动连接件外部且所述扭簧的至少一个末端能够与所述阻挡部接触,所述阻挡部用于定位及压缩所述扭簧。
9.所述的双平行四边形rcm机构,优选地,所述限位部包括设置在所述安装部内的一限位挡板,所述限位挡板上形成有限制所述扭簧在给定的角度范围内运动的限位槽,所述扭簧的一末端可移动限制在所述限位挡板的限位槽内,所述扭簧的另一末端固定在所述安装部上。
10.所述的双平行四边形rcm机构,优选地,所述阻挡部为形成在靠近所述限位挡板的所述转动连接部上的挡钉。
11.所述的双平行四边形rcm机构,优选地,所述限位部包括间隔设置在所述安装部内的两限位挡板,所述两限位挡板上形成有限制所述扭簧在给定的角度范围内运动的限位槽,所述扭簧的两末端分别可移动限制在所述两限位挡板的限位槽内。
12.所述的双平行四边形rcm机构,优选地,所述阻挡部为分别形成在靠近所述两限位挡板的所述转动连接部上的两挡钉。
13.所述的双平行四边形rcm机构,优选地,所述随停旋转关节还包括阻尼增加机构,所述阻尼增加机构包括:导向件,设置在所述安装部上且可沿所述安装部的径向旋进或旋出;摩擦件,径向可移动、周向不可转动地设置在所述转动连接部外部,且所述摩擦件与所述转动连接部之间存在摩擦界面,所述摩擦件与所述导向件之间留有间隙;弹性件,设置在所述导向件与所述摩擦件之间。
14.所述的双平行四边形rcm机构,优选地,所述安装部上开设有用于安装所述导向件和摩擦件的安装通孔,所述安装通孔的一部分形成螺纹孔,所述导向件的至少一部分形成与所述螺纹孔相配合的外螺纹段,所述导向件的外螺纹段螺纹配合在所述安装通孔的螺纹孔内;所述安装通孔的另一部分形成导向孔,所述摩擦件的至少一部分滑动配合在所述安装通孔的导向孔内,以限制所述摩擦件的周向运动但不限制所述摩擦件沿所述旋转轴的径向移动。
15.所述的双平行四边形rcm机构,优选地,所述第一锁紧机构为端面齿啮合锁紧机构,所述端面齿啮合锁紧机构包括:端面齿形盘,固定在安装部上;端面齿平移块,可滑动地设置在所述双平行四边形杆系的输入端上,且所述端面齿平移块所述靠近所述端面齿形盘所述的一侧具有与所述端面齿形盘所述相配合的啮合齿,所述端面齿平移块可沿所述双平行四边形杆系的长度方向移动,从而与所述端面齿形盘啮合或脱离啮合;保持板,固定在所述双平行四边形杆系的输入端上,且所述保持板位于远离所述端面齿形盘的所述端面齿平移块一侧;导向螺钉,同时与所述端面齿平移块和保持板连接;压缩弹簧,套设在所述导向螺钉上,且所述压缩弹簧的一端抵顶在所述保持板上,压缩弹簧的另一端抵顶在所述端面齿平移块上;解锁控制线,所述解锁控制线的一端连接所述端面齿平移块,所述解锁控制线的另一端连接所述手术执行机构的解锁把手。
16.所述的双平行四边形rcm机构,优选地,所述第二锁紧机构为周面齿啮合锁紧机构,所述周面齿啮合锁紧机构包括:周面齿形盘,固定在形成双平行四边形杆系某一铰接关节的第一杆件上;周面齿平移块,可滑动地设置在形成该铰接关节的第二杆件上,且该铰接关节的铰接轴线同时垂直于所述第一杆件和第二杆件的长度方向;所述周面齿平移块靠近
所述周面齿形盘的一侧具有与所述周面齿形盘相配合的啮合齿,所述周面齿平移块可沿所述第二杆件的长度方向移动,从而与所述周面齿形盘啮合或脱离啮合;保持板,固定在所述第二杆件上,且所述保持板位于远离所述周面齿形盘的所述周面齿平移块一侧;导向螺钉,同时与所述周面齿平移块和保持板连接;压缩弹簧,套设在所述导向螺钉上,且所述压缩弹簧的一端抵顶在所述保持板上,压缩弹簧的另一端抵顶在所述周面齿平移块上;解锁控制线,所述解锁控制线的一端连接所述周面齿平移块,所述解锁控制线的另一端连接所述手术执行机构的解锁把手。
17.所述的双平行四边形rcm机构,优选地,在所述双平行四边形杆系的其余至少一个铰接关节上还设置有阻尼调节机构,所述阻尼调节机构包括:转动部,具有可相对转动的内圈和外圈,且所述转动部的外圈与形成该铰接关节的第三杆件固定连接;第一摩擦部,与所述转动部的内圈和形成该铰接关节的第四杆件连接;第二摩擦部,轴向可移动、周向不可转动地设置在所述第三杆件上,且所述第二摩擦部与所述第一摩擦部之间形成摩擦界面;调节部,与所述第二摩擦部连接,用于驱动所述第二摩擦部靠近或远离所述第一摩擦部,以使所述第二摩擦部与所述第一摩擦部之间接触界面的摩擦阻尼增加或减小。
18.所述的双平行四边形rcm机构,优选地,所述调节部包括:保持架,与所述第三杆件和转动部的外圈同时固定连接,且所述保持架与所述转动部之间留有间隙,所述第一摩擦部和第二摩擦部位于所述保持架与所述转动部之间的间隙中;导向件,设置在所述保持架内且可沿所述阻尼调节机构的轴线旋进或旋出;弹性件,所述弹性件的一端抵顶在所述导向件上,所述弹性件的另一端抵顶在所述第一摩擦部上。
19.所述的双平行四边形rcm机构,优选地,所述导向件包括导向杆和一体形成于导向杆一端的螺头,所述螺头的外周具有外螺纹,所述保持架的内圈具有与所述螺头的外螺纹相配合的内螺纹,所述螺头螺纹连接在所述保持架内;所述导向杆与所述螺头之间形成有弹性件定位套,所述弹性件套设在所述导向杆上,所述弹性件的一端位于在所述弹性件定位套内,所述弹性件的另一端抵顶在所述第一摩擦部上。
20.所述的双平行四边形rcm机构,优选地,所述双平行四边形杆系包括:第一连杆,所述第一连杆的一端形成所述双平行四边形杆系的输入端,且所述第一连杆的长度方向平行于所述随停旋转机构的旋转轴线;第二连杆和第三连杆,所述第二连杆和第三连杆平行间隔设置,且所述第二连杆和第三连杆与所述第一连杆的连接部位均形成铰接关节;第四连杆和第五连杆,与所述第一连杆平行间隔设置,且所述第四连杆和第五连杆分别与所述第二连杆和第三连杆的连接部位均形成铰接关节;第六连杆,与所述第二连杆和第三连杆平行间隔设置,且所述第六连杆与所述第四连杆和第五连杆的连接部位均形成铰接关节,所述第六连杆用于搭载所述手术执行机构,由此使所述手术执行机构的轴线始终通过所述双平行四边形杆系的rcm点。
21.所述的双平行四边形rcm机构,优选地,在所述双平行四边形杆系的第一连杆上还设置有两限位螺钉,用于限定所述双平行四边形杆系的扭转角度在一定范围之内。
22.所述的双平行四边形rcm机构,优选地,在所述双平行四边形杆系上还设置有重力平衡机构,所述重力平衡机构包括至少一根拉簧,所述拉簧连接所述双平行四边形杆系中至少一个平行四边形的两个不同连杆,并且在仅有正常负载作用时,所述平行四边形的运动方向使得所述拉簧与所述平行四边形两个连接点的距离增大。
23.所述的双平行四边形rcm机构,优选地,,在所述随停旋转关节和/或所述双平行四边形杆系的至少一个铰接关节上还设置有编码器,用来计算所述随停旋转关节和/或所述双平行四边形杆系的该铰接关节的旋转角度精确值。
24.一种微创手术机器人,包括上述的双平行四边形rcm机构以及手术执行机构,所述手术执行机构包括线性模组、解锁把手和手术工具,所述线性模组设置在所述双平行四边形杆系的输出端上,所述手术工具可沿所述线性模组平移,从而通过所述双平行四边形杆系的rcm点靠近或远离手术切口。
25.本发明由于采取以上技术方案,其具有以下优点:1、本发明采用基于双平行四边形杆系的rcm机构,该rcm机构具有较大的刚性,可用于负载较大的场合。2、本发明在rcm机构上增设了助力机构,可以减轻操作者操作时所用的力,从而方便操作者进行手术操作。3、本发明在rcm机构上增设了阻尼机构,使得rcm机构的两个自由度都能够达到随意停功能,使得操作者更容易调整入腹点,并且避免关节自由运动,增加手术安全性。4、本发明在rcm机构上增设了锁紧机构,可以确保rcm机构的两个自由度处于完全锁定状态,进一步增加手术安全性。本发明相比该传统的rcm机构具有更强的实用性、操作性和安全性。
附图说明
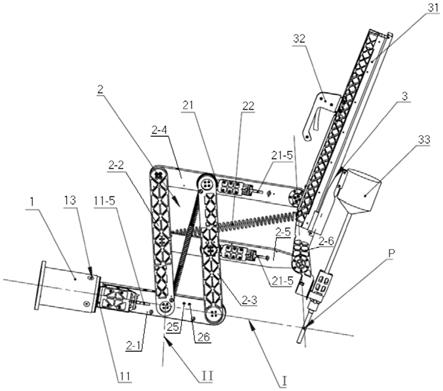
26.图1为本发明一实施例微创手术机器人的主视图;
27.图2是本发明该实施例微创手术机器人的后视图;
28.图3是本发明该实施例随停旋转关节的端面结构示意图;
29.图4是本发明该实施例随停旋转关节的内部结构示意图;
30.图5是本发明该实施例安装壳体的结构示意图;
31.图6是本发明该实施例阻尼增加机构的结构示意图;
32.图7是本发明该实施例阻尼增加机构的剖视图;
33.图8是本发明该实施例第一锁紧机构的结构示意图;
34.图9是本发明该实施例第二锁紧机构的结构示意图;
35.图10是本发明该实施例阻尼调节机构的剖视图;
36.图11是本发明该实施例可调阻尼机构的结构示意图;
37.图12是本发明该实施例可调阻尼机构的爆炸图;
38.图13是本发明该实施例导向螺钉的结构示意图。
具体实施方式
39.以下将结合附图对本发明的较佳实施例进行详细说明,以便更清楚理解本发明的目的、特点和优点。应理解的是,附图所示的实施例并不是对本发明范围的限制,而只是为了说明本发明技术方案的实质精神。
40.如图1、图2所示,本实施例提供的双平行四边形rcm机构包括随停旋转关节1和双平行四边形杆系2。随停旋转关节1与双平行四边形杆系2的输入端关联,双平行四边形杆系2绕随停旋转关节1的旋转轴线ⅰ转动。双平行四边形杆系2的输出端与外部的手术执行机构3关联,双平行四边形杆系2具有绕其铰接轴线ii的转动自由度,无论绕旋转轴线ⅰ和/或铰接轴线ii旋转任意角度,双平行四边形杆系2均可以保证手术执行机构3的移动轴线始终通
过空间的某一固定点p,此固定点p即双平行四边形杆系2的rcm点。在随停旋转关节1与双平行四边形杆系2的输入端之间设置有第一锁紧机构11,用于锁紧或解锁随停旋转关节1与双平行四边形杆系2之间的旋转副;在双平行四边形杆系2的至少一个铰接关节上设置有第二锁紧机构21,用于锁紧或解锁形成该铰接关节的两杆件之间的旋转副。
41.在上述实施例中,优选地,如图3到图5所示,随停旋转关节1包括弹簧助力机构12和阻尼增加机构13,该弹簧助力机构12包括安装壳体12-1、旋转轴12-2、轴承12-3、扭簧12-4、挡钉12-5、挡钉12-6和限位挡板12-7。轴承12-3的内圈与旋转轴12-2配合接触,轴承12-3的外圈与安装壳体12-1配合接触(由此轴承12-3通过内外圈的配合接触而被径向定位)。旋转轴12-2与双平行四边形杆系2的输入端固定连接(也可以与双平行四边形杆系2的输入端一体成形),以使双平行四边形杆系2可相对于安装壳体12-1自由转动,且旋转轴12-2的旋转轴线ⅰ同时平行于安装壳体12-1和双平行四边形杆系2的输入端的长度方向。挡钉12-5和挡钉12-6分别形成于旋转轴12-2的两端部,扭簧12-4套设在旋转轴12-2外部且扭簧12-4两侧的外伸腿4-a和外伸腿4-b分别与挡钉12-6和挡钉12-5接触。两限位挡板12-7分别设置在位于旋转轴12-2两端部的安装壳体12-1内,两限位挡板12-7上分别形成有限制扭簧12-4在给定的角度范围内运动的限位槽7-a和限位槽7-b,扭簧12-4两侧的外伸腿4-a和外伸腿4-b分别可移动限制在限位槽7-a和限位槽7-b内。
42.由此,当双平行四边形杆系2绕随停旋转关节1的旋转轴线ⅰ转动时,将带动与旋转轴12-2固连的挡钉12-5和挡钉12-6一起转动,挡钉12-5/挡钉12-6将压着与之相对应的外伸腿4-b/外伸腿4-a使得扭簧12-4压缩,此时扭簧12-4另一侧的外伸腿4-a/伸腿4-b被限位槽7-a/限位槽7-b的止挡端限制而不动,由此扭簧12-4将同样产生平衡力来平衡双平行四边形杆系2的重力引起的力矩,达到力平衡的目的,减少人为作用力。
43.在上述实施例中,优选地,限位挡板12-7为环形板,限位挡板12-7套设在旋转轴12-2外部,限位挡板12-7与安装壳体12-1一体成形或者与安装壳体12-1固定连接,两限位挡板12-7上的限位槽4-a和限位槽4-b均为弧形。
44.当然,本领域技术人员可以理解的是,在上述实施例中也可以仅设置一块限位挡板12-7和一个限位挡钉12-5,此时仅扭簧12-4的外伸腿4-b可移动限制在该限位挡板12-7的限位槽7-b内,而扭簧12-4的外伸腿4-a可以与安装壳体12-1固定连接,由此则形成可单向助力的弹簧助力机构12。
45.在上述实施例中,优选地,如图6、图7所示,阻尼增加机构13包括:导向螺钉13-1,设置在安装壳体12-1上且可沿安装壳体12-1的径向旋进或旋出;摩擦块13-2,径向可移动、周向不可转动地设置在旋转轴12-2外部,且摩擦块13-2与旋转轴12-2之间存在摩擦界面,摩擦块13-2与导向螺钉13-1之间留有间隙;压缩弹簧13-3,设置在导向螺钉13-1与摩擦块13-2之间。由此,当旋进或旋出导向螺钉13-1时,可改变导向螺钉13-1与摩擦块13-2之间的距离,从而改变压缩弹簧13-3的压缩量来改变摩擦块13-2对旋转轴12-2的压力,进而控制旋转轴12-2转动时受到的摩擦阻尼的大小。
46.在上述实施例中,优选地,安装壳体12-1上开设有用于安装导向螺钉13-1和摩擦块13-2的安装通孔,安装通孔的一部分形成螺纹孔,导向螺钉13-1的螺头部分具有与螺纹孔相配合的外螺纹,导向螺钉13-1的螺头部分螺纹配合在安装通孔的螺纹孔内;安装通孔的另一部分形成导向孔,摩擦块13-2的至少一部分滑动配合在安装通孔的导向孔内,以限
制摩擦块13-2的周向运动但不限制摩擦块13-2沿旋转轴12-2的径向移动。
47.在上述实施例中,优选地,如图3所示,为实现手术过程中算法要求,在随停旋转关节1和/或双平行四边形杆系2的至少一个铰接关节上还设置有编码器14,用来计算随停旋转关节1和/或双平行四边形杆系2的该铰接关节的旋转角度精确值。
48.如图8所示,第一锁紧机构11采用端面齿啮合锁紧机构,该端面齿啮合锁紧机构包括:端面齿形盘11-1,固定在安装壳体12-1上;端面齿平移块11-2,通过滑块11-3和导轨11-4可滑动地设置在双平行四边形杆系2的输入端上,且端面齿平移块11-2靠近端面齿形盘11-1的一侧具有与端面齿形盘11-1相配合的啮合齿,端面齿平移块11-2可沿着双平行四边形杆系2的长度方向移动,从而与端面齿形盘11-1啮合或脱离啮合。
49.同时,在远离端面齿形盘11-1的端面齿平移块11-2另一侧的双平行四边形杆系2的输入端上固定设置有保持板11-6,保持板11-6上沿连杆2的长度方向对称地设置有两根导向螺钉11-7,且两根导向螺钉11-7同时与端面齿平移块11-2和保持板11-6螺纹连接。在两根导向螺钉11-7上套设有压缩弹簧11-8,压缩弹簧11-8的一端抵顶在端面齿平移块11-2上,压缩弹簧48的另一端抵顶在保持板11-6上。在两根导向螺钉11-7之间的保持板11-6上设置有解锁控制线11-5,解锁控制线11-5主要由外层套管5-1和内圈钢丝绳5-2组成,外层套管5-1的一端连接到保持板11-6上,内圈钢丝绳5-2的一端穿过外层套管5-1后与端面齿平移块11-2固定连接,内圈钢丝绳5-2的另一端与手术执行机构3的解锁把手32相连。
50.由此,在自然状态下,若干压缩弹簧11-8将推动端面齿平移块11-2与端面齿形盘41啮合,此时随停旋转关节1和双平行四边形杆系2之间的运动副处于锁紧状态,双平行四边形杆系2不可自由转动;当用足够的力拉动解锁控制线11-5的内圈钢丝绳5-2时,端面齿平移块11-2将克服摩擦力及压缩弹簧11-8的弹力而与端面齿形盘11-1脱离啮合,此时随停旋转关节1和双平行四边形杆系2之间的运动副将处于解锁状态,双平行四边形杆系2可自由转动。
51.如图9所示,第二锁紧机构21采用周面齿啮合锁紧机构,该周面齿啮合锁紧机构包括:周面齿形盘21-1,固定在形成双平行四边形杆系2某一铰接关节的第一杆件上;周面齿平移块21-2,通过滑块21-3和导轨21-4可滑动地设置在形成双平行四边形杆系2该铰接关节的第二杆件上,且该铰接关节的铰接轴线同时垂直于第一杆件和第二杆件的长度方向;周面齿平移块21-2靠近周面齿形盘21-1的一侧具有与周面齿形盘21-1相配合的啮合齿,周面齿平移块21-2可沿第二杆件的长度方向移动,从而与周面齿形盘21-1啮合或脱离啮合。
52.同时,在远离周面齿形盘21-1的周面齿平移块21-2另一侧的第二杆件上固定设置有保持板21-6,保持板21-6上沿第二杆件的长度方向对称地设置有两根导向螺钉21-7,且两根导向螺钉21-7同时与周面齿平移块21-2和保持板21-6螺纹连接。在两根导向螺钉21-7上套设有压缩弹簧21-8,压缩弹簧21-8的一端抵顶在周面齿平移块21-2上,压缩弹簧21-8的另一端抵顶在保持板21-6上。在两根导向螺钉21-7之间的保持板21-6上设置有解锁控制线21-5,解锁控制线21-5亦主要由外层套管5-1和内圈钢丝绳5-2组成,外层套管5-1的一端连接到保持板21-6上,内圈钢丝绳5-2的一端穿过外层套管5-1后与周面齿平移块21-2固定连接,内圈钢丝绳5-2的另一端与手术执行机构3的解锁把手32相连。
53.由此,在自然状态下,若干压缩弹簧21-8将推动周面齿平移块21-2与周面齿形盘21-1啮合,此时第一杆件和第二杆件之间的运动副处于锁紧状态,第一杆件和第二杆件不
可自由转动;当用足够的力拉动解锁控制线21-5的内圈钢丝绳5-2时,周面齿平移块21-2将克服摩擦力及压缩弹簧21-8的弹力而与周面齿形盘21-1脱离啮合,此时第一杆件和第二杆件之间的运动副将处于解锁状态,第一杆件和第二杆件可自由转动。
54.在上述实施例中,优选地,如图1所示,在双平行四边形杆系2的其余至少一个铰接关节上还设置有阻尼调节机构23。如图10至图12所示,该可调阻尼机构23包括:交叉滚子轴承23-1,且交叉滚子轴承23-1的外圈与形成该铰接关节的第三杆件2-a固定连接;内圈摩擦环23-2(也可以是摩擦块或摩擦片),与交叉滚子轴承23-1的内圈和形成该铰接关节的第四杆件2-b通过螺栓23-7和螺母23-8固连;外圈摩擦环23-3,轴向可移动、周向不可转动地设置在第三杆件2-a上,且外圈摩擦环23-3与内圈摩擦环23-2之间形成接触界面;调节部,与外圈摩擦环23-3连接,用于驱动外圈摩擦环23-3沿阻尼调节机构23的轴线靠近或远离内圈摩擦环23-2,以使外圈摩擦环23-3与内圈摩擦环23-2之间接触界面的摩擦阻尼增加或减小。
55.在上实施例中,优选地,如图12、图13所示,调节部包括保持架23-4、压缩弹簧23-5和导向螺钉23-6。保持架23-4通过螺栓23-9和螺母23-10与第三杆件2-a和交叉滚子轴承23-1的外圈同时固定连接,且保持架23-4与交叉滚子轴承23-1之间留有间隙,内圈摩擦环23-2和外圈摩擦环23-2位于保持架23-4与交叉滚子轴承23-1之间的间隙中;导向螺钉23-6主要由导向杆6-1和一体形成于导向杆6-1一端的螺头6-2组成,且螺头6-2的外周具有外螺纹,同时保持架23-4的内圈具有与螺头6-2的外螺纹相配合的内螺纹,螺头6-2螺纹连接在保持架23-4内;导向杆6-1与螺头6-2之间形成有弹簧定位套6-3,压缩弹簧23-5套设在导向杆6-1上,压缩弹簧23-5的一端位于在弹簧定位套6-3内,压缩弹簧23-5的另一端抵顶在内圈摩擦环23-2上。由此,当旋转导向螺钉23-6使其沿阻尼调节机构23的轴线向内侧移动(即旋进)时,将使得压缩弹簧23-5的压缩量增大,从而使外圈摩擦环23-3与内圈摩擦环23-2之间产生更大的摩擦阻尼,以限制交叉滚子轴承23-1的内、外圈之间的相对转动,进而限制分别与交叉滚子轴承23-1的内、外圈相连的第三杆件2-a和第四杆件2-b的相对转动;反之,当旋转导向螺钉23-6使其沿阻尼调节机构23的轴线向外侧移动(即旋出)时,将使得压缩弹簧23-5的压缩量减少,从而使外圈摩擦环23-3与内圈摩擦环23-2之间的摩擦阻尼减小,以促进交叉滚子轴承23-1的内、外圈之间的相对转动,进而促进分别与交叉滚子轴承23-1的内、外圈相连的第三杆件2-a和第四杆件2-b的相对转动。
56.在上述实施例中,优选地,如图1所示,双平行四边形杆系2包括:第一连杆2-1,第一连杆2-1的一端与旋转轴12-2固定连接(也可以与旋转轴12-2一体成形),且第一连杆2-1的长度方向平行于随停旋转机构1的旋转轴线ⅰ;第二连杆2-2和第三连杆2-3,第二连杆2-2和第三连杆2-3平行间隔设置,且第二连杆2-2和第三连杆2-3与第一连杆2-1的连接部位均形成铰接关节;第四连杆2-4和第五连杆2-5,与第一连杆2-1平行间隔设置,且第四连杆2-4和第五连杆2-5分别与第二连杆2-2和第三连杆2-3的连接部位均形成铰接关节;第六连杆2-6,与第二连杆2-2和第三连杆2-3平行间隔设置,且第六连杆2-6与第四连杆2-4和第五连杆2-5的连接部位均形成铰接关节,第六连杆2-6用于搭载手术执行机构3,由此使手术执行机构3的轴线始终通过固定点p。
57.在上述实施例中,优选地,在双平行四边形杆系2上还设置有重力平衡机构22,该重力平衡机构22包括至少一根拉簧,拉簧连接双平行四边形杆系2中至少一个平行四边形
的两个不同连杆,并且在仅有正常负载作用时,该平行四边形的运动方向使得拉簧与该平行四边形两个连接点的距离增大,由此拉簧提供的平衡力可以将连杆及负载的大部分重力平衡掉。
58.在上述实施例中,优选地,在双平行四边形杆系2的第一连杆2-1上还设置有限位螺钉25、26,用于限定双平行四边形杆系2的扭转角度在一定范围之内。
59.基于上述实施例提供的双平行四边形rcm机构,本发明还提供了一种微创手术机器人,该微创手术机器人包括随停旋转关节1、双平行四边形杆系2和手术执行机构3,手术执行机构3包括线性模组31、解锁把手32和手术工具33,线性模组31设置在双平行四边形杆系2的输出端上,手术工具33可沿线性模组31平移,从而通过固定点p靠近或远离手术切口。
60.上述各实施例仅用于说明本发明,其中各部件的结构、连接方式和制作工艺等都是可以有所变化的,凡是在本发明技术方案的基础上进行的等同变换和改进,均不应排除在本发明的保护范围之外。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1