一种基于自适应控制加权因子策略的胰岛素输注量控制方法与流程
[0001]
本发明涉及胰岛素泵输注量估算领域,更具体地,涉及一种基于自适应控制加权因子策略的胰岛素输注量控制方法。
背景技术:
[0002]
糖尿病是威胁人类生命健康的重大慢性疾病之一,并且给社会的发展带来了沉重的负担。目前中国糖尿病患者人数约为1.164亿,位列世界首位。人工胰腺,又被称为胰岛素闭环输注系统,能够根据人体血糖波动自动输注胰岛素,从而控制糖尿病患者的血糖水平在设定的目标区间内。作为一种有效的糖尿病治疗手段,人工胰腺已经在多个欧美国家进入长期临床试验阶段,并且取得了良好的效果。
[0003]
虽然基于广义预测控制的人工胰腺智能系统已经在一型糖尿病患者的血糖控制方面取得了不俗的表现,但是其还存在一个突出的问题,就是过量胰岛素注射所导致的低血糖风险。目前,所采用的低血糖预防策略主要是引入胰岛素代谢曲线并计算患者体内的胰岛素残留。但是该策略有一个重要的缺陷就是个体差异较大,每个患者均需要测绘自身的胰岛素代谢曲线。同时,该曲线受到患者饮食条件、运动条件和心情的影响,往往存在较大误差。
[0004]
专利公开号cn110124151a公开了一种基于自适应参考曲线策略的广义预测控制闭环胰岛素输注系统。然而,上述专利是通过自适应参考曲线对血糖进行控制,并不是通过自适应控制加权因子对血糖进行控制。
技术实现要素:
[0005]
为解决上述技术问题,本发明的技术方案如下:
[0006]
一种基于自适应控制加权因子策略的胰岛素输注量控制方法,包括以下步骤:
[0007]
通过血糖值检测模块采集当前的使用者的血糖值;
[0008]
根据当前的使用者的血糖值,通过carima模型和丢番图方程得到未来的使用者的血糖变化的预测值;
[0009]
根据未来的使用者的血糖变化的预测值,通过最小方差控制模型计算胰岛素泵的控制输入增量;其中,最小方差控制使用的控制加权因子是自适应控制加权因子,所述的自适应控制加权因子λ通过下式进行表达:
[0010]
λ=(ξ
×
u)
δy
[0011]
式中,所述的ξ表示预设值;所述的u表示偏离度;所述的δy表示血糖值的变化量;
[0012]
基于闭环控制的思想,对胰岛素泵的控制输入增量进行迭代优化。
[0013]
本发明具有以下有益效果:
[0014]
1、本发明相较于已有的比例微积分控制、模糊逻辑控制和模型预测控制,本发明具有更高的鲁棒性、搭建较为容易且不需要手动输入进餐信息;
[0015]
2、本发明采用了carima预测模型、最小方差控制模型、闭环反馈校正和参数滚动
优化,从而保证了预测的准确性和控制的有效性;
[0016]
3、本发明采用了自适应控制加权因子策略,该策略可以在患者血糖出现下降趋势的时候迅速调低胰岛素注射速率,预防过量胰岛素输注所导致的低血糖现象。
[0017]
在一种优选的方案中,所述的“根据当前的使用者的血糖值,通过carima模型和丢番图方程得到未来的使用者的血糖变化的预测值”[0018]
通过carima模型和丢番图方程,得到以下方程:
[0019]
y(k+j)=g
j
(z-1
)δu(k+j-1)+f
j
(z-1
)y(k)(j=1,2...n)
[0020]
式中,所述的y(k)表示使用者在k时刻的血糖值;所述的y(k+j)表示使用者在k时刻超前j步的血糖值的预测值;δu(k+j-1)表示胰岛素泵在k时刻的控制输入增量;所述的n表示最大预测长度;所述的g
j
(z-1
)表示胰岛素泵在k时刻的控制输入增量的权重系数;所述的f
j
(z-1
)表示血糖值的权重系数;所述的z-1
为后移1步的算子。
[0021]
在一种优选的方案中,所述的g
j
(z-1
)通过下式进行表达:
[0022]
g
j
(z-1
)=e
j
(z-1
)b(z-1
)
[0023]
所述的e
j
(z-1
)通过下式进行表达:
[0024]
e
j
(z-1
)=e
j0
+e
j1
z-1
+
…
+e
j-1
z-j+1
[0025]
式中,所述的e
j0
~e
j-1
是可调参数;所述的z-1
~z-j+1
是后移1~j-1步的算子;
[0026]
所述的b(z-1
)通过下式进行表达:
[0027]
b(z-1
)=b0+b1z-1
+
…
+b
nb
z-nb
[0028]
式中,所述的b0~b
nb
是可调参数;所述的z-1
~z-nb
是后移1~nb步的算子。
[0029]
在一种优选的方案中,所述的f
j
(z-1
)通过下式进行表达:
[0030]
f
j
(z-1)=f
j0
+f
j1
z-1
+
…
+f
jn
z-n
[0031]
式中,所述的f
j0
~f
jn
是可调参数;所述的z-1
~z-n
是后移1~n步的算子。
[0032]
本优选方案中,给出y(k+j)=g
j
(z-1
)δu(k+j-1)+f
j
(z-1
)y(k)的推导思路:
[0033]
crima模型描述如下;
[0034]
a(z-1
)y(k)=b(z-1
)u(k-1)+c(z-1
)ξ(k)/δ
[0035]
a(z-1
)=1+a1z-1
+
…
+a
na
z-na
[0036]
b(z-1
)=b0+b1z-1
+
…
+b
nb
z-nb
[0037]
c(z-1
)=1+c1z-1
+
…
+c
nc
z-nc
[0038]
其中,所述的y(k)表示使用者在k时刻的血糖值,u(k-1)为k-1时刻的胰岛素注射速率;ξ(k)为均值为零的白噪声;δ=(1-z-1
),表示积分因子。z-1
为后移算子,na,nb,nc表示模型的阶数。a1~a
na
,b1~b
nb
和c1~c
nz
均为可在线实时优化的模型参数,根据采集环境赋予不同的数值。
[0039]
为了预测超前j步输出,引入丢番图dioaphantine方程:
[0040]
1=e
j
(z-1
)a(z-1
)δ+z-j
f
j
(z-1
)
[0041]
e
j
(z-1
)=e
j0
+e
j1
z-1
+
…
+e
j-1
z-j+1
[0042]
f
j
(z-1
)=f
j0
+f
j1
z-1
+
…
+f
jn
z-n
[0043]
其中,e
j
(z-1
)和f
j
(z-1
)是由是由模型参数a(z-1
)和预测步长j唯一确定的多项式,其中,e
j0
~e
j-1
和f
j0
~c
jn
均为可在线实时优化的参数,根据采集环境赋予不同的数值。n表示最大预测长度。预测步长j=1,2...n。
[0044]
通过carima模型和丢番图方程,得到以下方程:
[0045]
y(k+j)=g
j
(z-1
)δu(k+j-1)+f
j
(z-1
)y(k)(j=1,2...n)
[0046]
g
j
(z-1
)=e
j
(z-1
)b(z-1
)
[0047]
式中所述的y(k+j)表示使用者在k时刻超前j步的血糖值的预测值;δu(k+j-1)表示胰岛素泵在k时刻的控制输入增量。
[0048]
在一种优选的方案中,所述的“根据未来的使用者的血糖变化的预测值,通过最小方差控制模型计算胰岛素泵的控制输入增量”包括以下内容:
[0049][0050]
式中,所述的j表示胰岛素泵的输注速率;所述的n表示预测长度;所述的λ表示自适应控制加权因子;所述的m表示控制长度;所述的w(k+j)通过下式进行表达:
[0051]
w=qy(k)+my
r
(j=1,2,...,n)
[0052]
式中,所述的y
r
表示参考曲线;所述的y(k)表示当前的使用者的血糖值;
[0053]
所述的q通过下式进行表达:
[0054]
q=[α,α2,...,α
n
]
t
[0055]
所述的α表示自适应柔化因子。
[0056]
在一种优选的方案中,所述的m通过下式进行表达:
[0057]
m=[1-α,1-α2,...,1-α
n
]
t
。
[0058]
在一种优选的方案中,所述的自适应控制加权因子包括以下内容:
[0059]
人为设定血糖期望值
[0060]
根据当前的使用者的血糖值y(k),计算当前的使用者的血糖值与血糖期望值的偏离度u;
[0061]
计算当前的使用者的血糖值的变化量δy
[0062]
通过偏离度u和变化量δy计算自适应控制加权因子λ。
[0063]
在一种优选的方案中,所述的偏离度u通过下式进行表达:
[0064][0065]
在一种优选的方案中,所述的变化量δy通过下式进行表达:
[0066]
δy=y(k)-y(k-1)
[0067]
所述的y(k-1)表示前一时刻的使用者的血糖值。
[0068]
在一种优选的方案中,所述的“基于闭环控制的思想,对胰岛素泵的控制输入增量进行迭代优化”包括以下子步骤:
[0069]
s1:将胰岛素泵的控制输入增量作为carima模型的输入值,对使用者的血糖变化的预测值进行更新;
[0070]
s2:根据更新后的使用者的血糖变化的预测值作为最小方差控制模型的输入,更新胰岛素泵的控制输入增量;其中,最小方差控制使用的控制加权因子是自适应控制加权因子,所述的自适应控制加权因子会根据血糖值的变化而调节自身数值的大小;
[0071]
s3:循环执行s1~s2,实现对胰岛素泵的控制输入增量进行迭代优化。
[0072]
与现有技术相比,本发明技术方案的有益效果是:
[0073]
1、本发明相较于已有的比例微积分控制、模糊逻辑控制和模型预测控制,本发明具有更高的鲁棒性、搭建较为容易且不需要手动输入进餐信息;
[0074]
2、本发明采用了carima预测模型、最小方差控制模型、闭环反馈校正和参数滚动优化,从而保证了预测的准确性和控制的有效性;
[0075]
3、本发明采用了自适应控制加权因子策略,该策略可以在患者血糖出现下降趋势的时候迅速调低胰岛素注射速率,预防过量胰岛素输注所导致的低血糖现象。
附图说明
[0076]
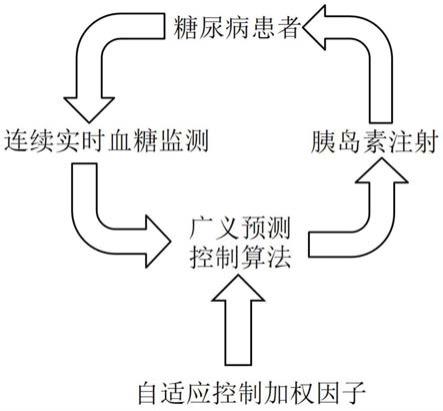
图1为实施例的控制原理图。
[0077]
图2为实施例的参考曲线的示意图。
[0078]
图3为实施例的自适应控制加权因子的示意图。
[0079]
图4为传统广义预测控制算法的实验结果。
[0080]
图5为实施例的实验结果。
具体实施方式
[0081]
附图仅用于示例性说明,不能理解为对本专利的限制;
[0082]
为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;
[0083]
对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0084]
下面结合附图和实施例对本发明的技术方案做进一步的说明。
[0085]
实施例
[0086]
如图1所示,一种基于自适应控制加权因子策略的胰岛素输注量控制方法,包括以下步骤:
[0087]
s1:根据当前的使用者的血糖值,通过carima模型和丢番图方程得到未来的使用者的血糖变化的预测值;
[0088]
通过carima模型和丢番图方程,得到以下方程:
[0089]
y(k+j)=g
j
(z-1
)δu(k+j-1)+f
j
(z-1
)y(k)(j=1,2...n)
[0090]
式中,y(k)表示使用者在k时刻的血糖值;y(k+j)表示使用者在k时刻超前j步的血糖值的预测值;δu(k+j-1)表示胰岛素泵在k时刻的控制输入增量;n表示最大预测长度;g
j
(z-1
)表示胰岛素泵在k时刻的控制输入增量的权重系数;f
j
(z-1
)表示血糖值的权重系数;z-1
为后移1步的算子;
[0091]
g
j
(z-1
)通过下式进行表达:
[0092]
g
j
(z-1
)=e
j
(z-1
)b(z-1
)
[0093]
e
j
(z-1
)通过下式进行表达:
[0094]
e
j
(z-1
)=e
j0
+e
j1
z-1
+
…
+e
j-1
z-j+1
[0095]
式中,e
j0
~e
j-1
是可调参数;z-1
~z-j+1
是后移1~j-1步的算子;
[0096]
b(z-1
)通过下式进行表达:
[0097]
b(z-1
)=b0+b1z-1
+
…
+b
nb
z-nb
[0098]
式中,b0~b
nb
是可调参数,b1=0.5,b2=0.5,b3=0.5,b4=0.5,b5=0.5;z-1
~z-nb
是后移1~nb步的算子;
[0099]
f
j
(z-1
)通过下式进行表达:
[0100]
f
j
(z-1
)=f
j0
+f
j1
z-1
+
…
+f
jn
z-n
[0101]
式中,f
j0
~f
jn
是可调参数;z-1
~z-n
是后移1~n步的算子;n表示最大预测长度,n=8。
[0102]
s2:根据s1的未来的使用者的血糖变化的预测值,通过最小方差控制模型计算胰岛素泵的控制输入增量;其中最小方差控制使用控制加权因子是自适应控制加权因子;
[0103][0104]
式中,j表示胰岛素泵的输注速率;n表示预测长度;λ表示自适应控制加权因子;m表示控制长度;w(k+j)通过下式进行表达:
[0105]
w(k+j)=α
j
y(k)+(1-α
j
)y
r
(j=1,2,...,n)
[0106]
上式可进一步写为向量形式
[0107]
w=qy(k)+my
r
(j=1,2,...,n)
[0108]
y
r
表示参考曲线,如图2所示;w通过下式进行表达:
[0109]
w=[w(k+1),w(k+2),...,w(k+n)]
t
[0110]
q通过下式进行表达:
[0111]
q=[α,α2,...,α
n
]
t
[0112]
α表示柔化因子,α=0.6;
[0113]
m通过下式进行表达:
[0114]
m=[1-α,1-α2,...,1-α
n
]
t
;
[0115]
如图3所示,自适应控制加权因子包括以下内容:
[0116]
设定血糖期望值
[0117]
根据当前的使用者的血糖值y(k),计算当前的使用者的血糖值与血糖期望值的偏离度u,偏离度u通过下式进行表达:
[0118][0119]
计算当前的使用者的血糖值的变化量δy,变化量δy通过下式进行表达:
[0120]
δy=y(k)-y(k-1);
[0121]
通过偏离度u和变化量δy计算自适应控制加权因子λ,自适应控制加权因子λ通过下式进行表达:
[0122]
λ=(3
×
u)
δy
;
[0123]
s3:基于闭环控制的思想,对胰岛素泵的控制输入增量进行迭代优化;
[0124]
s3.1:将胰岛素泵的控制输入增量作为carima模型的输入值,对使用者的血糖变化的预测值进行更新;
[0125]
s3.2:根据更新后的使用者的血糖变化的预测值作为最小方差控制模型的输入,更新胰岛素泵的控制输入增量;其中,最小方差控制使用的控制加权因子时自适应控制加权因子,自适应控制加权因子会根据使用者的情况调节自身数值大小;
[0126]
s3.3:循环执行s3.1~s3.2,实现对胰岛素泵的控制输入增量进行迭代优化。
[0127]
本实施例的测试环境:
[0128]
将本实施例植入美国fda批准的可代替动物实验的糖尿病模拟治疗测试软件t1dms中,并对算法进行性能测试。软件t1dms为美国fda批准的唯一可用于代替动物实验的糖尿病治疗测试软件。该软件的学术版本包括了10个虚拟的糖尿病成人患者、10个青少年患者和10个儿童患者模型,并提供了虚拟的cgms和胰岛素泵。测试过程中,只需要将控制算法植入测试平台,选定测试对象并设定进餐计划和监测指标,就可以观察其胰岛素泵的血糖控制效果。
[0129]
本实施例的实验结果:
[0130]
如图3所示,当血糖发生显著上升时,实施例会采用较高的自适应控制加权因子数值,从而迅速增大胰岛素的输注速率。当血糖出现下降趋势并变化平缓时,实施例会迅速降低自适应控制加权因子数值和胰岛素输注速率。
[0131]
如图4和图5所示,10个患有糖尿病青少年的实验结果(实线代表平均血糖,虚线代表血糖标准偏差)。图5显示了基于传统广义预测控制算法的血糖控制效果(控制加权因子λ=5)。虽然10名患者的血糖浓度在87.37%的测试时间处于70mg/dl-180mg/dl的理想区间内,但是存在明显的低血糖现象;图5显示了采用自适应控制加权因子的实验结果。10名患者的血糖浓度在86.12%的测试时间处于70mg/dl-180mg/dl的理想区间内,并且已完全消除低血糖现象。该测试结果清晰的表明,本实施例中所采用的控制加权因子可以在保证血糖控制效果的同时,预防低血糖现象。
[0132]
附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制;
[0133]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。例如,针对不同的情况可以设置不同的自适应优化因子计算模型,如指数模型或者对数模型,使得自适应柔化因子更恰合患者本身,更有利于稳定血糖值。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1