一种智能液压膝关节装置的制作方法
[0001]
本发明涉及医疗器械技术领域,具体涉及一种智能液压膝关节装置。
背景技术:
[0002]
随着因交通事故、疾病等原因导致的下肢截肢的患者逐渐增多,各种下肢假肢不断涌入市场,不仅在外观和功能上弥补了肢体缺陷所带来的不足,同时使截肢者可以自由地参与正常的生活和工作,满足了截肢患者回归社会的强烈意愿。膝关节装置作为下肢假肢的核心部件之一,其性能的优劣影响着患者步态及舒适度与否。
[0003]
目前国内现有的假肢膝关节多为机械式、气压式以及液压式膝关节,还没有可根据需要自行调节液压阻尼大小的智能液压膝关节产品,现有的这些产品很大程度上限制了患者的运动需求和功能需求,难以满足患者的期望。
技术实现要素:
[0004]
本发明的目的在于提供一种智能液压膝关节装置,用以解决现有产品限制了患者的运动需求和功能需求、难以满足患者的期望的问题。
[0005]
本发明提供一种智能液压膝关节装置,包括保护罩、骨架、液压控制单元、顶盖和智能液压膝关节控制系统,所述液压控制单元设置于骨架的内部,所述顶盖设置于骨架的顶端,所述保护罩设置于骨架的侧面;所述液压控制单元包括液压机构、传动机构和动力机构,所述动力机构能通过所述传动机构将动力传递至所述液压机构,所述液压机构能通过改变输油管内的流量大小来调节阻尼大小,进而调节膝关节的屈曲速度和复位速度;所述液压控制单元的底部和顶部分别设置有底部连接块和关节轴承;所述顶盖与所述骨架的顶端之间通过主轴枢接,所述顶盖与所述关节轴承之间通过第一轴枢接;所述底部连接块与所述骨架的底端之间通过第二轴枢接;所述智能液压膝关节控制系统包括一个控制板、若干电位计、第二惯性测量单元、一个压力感应装置和一个角度感应装置,所述控制板上集成有第一惯性测量单元和微处理器,所述控制板设置于保护罩上;所述动力机构包括若干伺服电机、若干减速器和若干动力机构输出轴,所述伺服电机的输出轴通过减速器与所述动力机构输出轴相连;若干所述电位计分别设置于所述动力机构输出轴上;所述压力感应装置设置于顶盖上,所述压力感应装置包括压力传感器;所述第二惯性测量单元设置于所述顶盖底部,所述第二惯性测量单元与所述第一惯性测量单元通过有线连接;所述角度感应装置包括设置于所述主轴上的磁铁和角度传感器芯片;所述伺服电机、所述减速器和所述电位计、所述压力传感器、所述第二惯性测量单元和所述角度传感器芯片均通过有线与所述控制板相连。
[0006]
优选地,所述液压机构包括液压缸和活塞杆,所述液压缸底部设置有压缩阻尼调节旋钮和回复阻尼调节旋钮,当活塞杆向下压缩时,调节压缩阻尼调节旋钮,实现活塞杆相对于液压缸压缩过程的阻尼调节;当活塞杆向上伸长时,调节回复阻尼调节旋钮,实现活塞杆相对于液压缸回复过程的阻尼调节;所述传动机构包括第一从带轮、第二从带轮、安装支
架、左导向支架、左主带轮、第一同步带以及右导向支架、右主带轮和第二同步带,所述安装支架固定套设所述液压缸的外壁,所述左导向支架和所述右导向支架分别设置于所述安装支架的两侧,所述左主带轮和所述右主带轮分别设置于所述左导向支架和所述右导向支架内;所述第一从带轮和所述第二从带轮分别设置于所述压缩阻尼调节旋钮和所述回复阻尼调节旋钮上;所述左主带轮通过所述第一同步带与所述第一从带轮连接,所述右主带轮通过所述第二同步带与所述第二从带轮连接。
[0007]
优选地,所述液压机构还包括压缩调节旋钮、回复调节旋钮、海绵蓄能器、反向单向阀和正向单向阀,所述活塞杆插设于所述液压缸内将所述液压缸分为位于上部的有活塞杆的有杆腔部和位于下部的无活塞杆的无杆腔部,所述无杆腔部的底部通过输油管连接所述压缩调节旋钮的进油端,所述压缩调节旋钮的出油端通过输油管连接至所述回复调节旋钮的进油端,所述回复调节旋钮的出油端通过输油管连接有杆腔部,且所述压缩调节旋钮的两端并联连接有正向单向阀,所述回复调节旋钮的两端并联连接有反向单向阀;所述海绵蓄能器有多个蓄压海绵组成,压缩调节旋钮的出油端与回复调节旋钮的进油端之间通过输油管与海绵蓄能器连通;所述压缩调节旋钮和所述回复调节旋钮分别与所述压缩阻尼调节旋钮和所述回复阻尼调节旋钮相关联。
[0008]
优选地,所述动力机构包括分别设置于所述安装支架两侧的第一动力机构和第二动力机构,所述第一动力机构和所述第二动力机构分别设置于所述左导向支架和所述右导向支架的内部且都固定于所述安装支架的外壁上;所述第一动力机构和所述第二动力机构均包括一个伺服电机、一个减速器和一个动力机构输出轴,所述伺服电机的输出轴通过减速器与所述动力机构输出轴相连;所述第一动力机构的动力机构输出轴与所述左主带轮通过齿轮连接,所述第二动力机构的动力机构输出轴与所述右主带轮通过齿轮连接。
[0009]
优选地,所述顶盖包括包括盖板、对接槽和枢接板,所述对接槽和所述枢接板分别固定于所述盖板的上表面和侧面上,所述盖板的底面的两侧分别设置有两个保护罩枢接孔,所述枢接板的底部的两端分别开设有两个液压控制单元枢接孔;所述骨架的顶部两端分别开设有两个顶盖对接孔,所述盖板的两个保护罩枢接孔分别设置有第一轴承和第二轴承,所述主轴的中部穿过所述盖板的两个保护罩枢接孔、两端设置于第一轴承和第二轴承,将骨架和顶盖枢接;所述枢接板的两个液压控制单元枢接孔内分别设有轴承,所述第一轴穿设所述枢接板的两个液压控制单元枢接孔的轴承和关节轴承的轴承孔,将所述顶盖的枢接板与所述关节轴承枢接;所述骨架底端开设有用于插设第二轴的通孔,通孔内内设置有滑动轴承,通过滑动轴承与第二轴枢接。
[0010]
优选地,所述第一轴的枢接处配设有螺杆、第一耐磨垫片和第二耐磨垫片,所述第一轴的一端通过螺纹连接有螺杆,所述第一耐磨垫片和所述第二耐磨垫片套设于螺杆上,且所述第一耐磨垫片和所述第二耐磨垫片分别位于第一轴两端与顶盖的接触处。
[0011]
优选地,所述智能液压膝关节控制系统包括两个电位计,两个所述电位计分别设置于所述第一动力机构和所述第二动力机构的动力机构输出轴上,所述伺服电机、所述电位计均通过有线与所述控制板相连。
[0012]
优选地,所述智能液压膝关节控制系统还包括微型电池,所述微型电池设置于保护罩上,所述微型电池、所述第一惯性测量单元与所述微处理器通过有线相连接。
[0013]
优选地,所述压力感应装置还包括一个四棱台感压盖帽和一个连接螺杆,所述四
棱台感压盖帽与所述压力传感器通过连接螺杆连接;所述压力传感器的底部设有凸起,顶盖顶部设有对接槽,所述顶盖顶部的对接槽与所述压力传感器底部的凸起相匹配,所述顶盖的对接槽对压力传感器形成约束,以确保压力传感器只受竖直方向的力。
[0014]
优选地,所述角度感应装置包括角度感应螺杆、磁铁、角度传感器芯片和角感支架,所述主轴的一端通过螺纹连接有角度感应螺杆;所述角度感应螺杆上设有一螺杆凹槽,所述磁铁装入该螺杆凹槽内;所述角度传感器芯片安装在角感支架上,所述角感支架通过螺钉与角度感应螺杆连接;所述角度传感器芯片与所述磁铁构成角度传感器,用于检测出当前膝关节的屈曲角度。
[0015]
本发明的有益效果是:
[0016]
本发明公开一种智能液压膝关节装置,采用液压控制单元作为阻尼控制元件,通过压力感应装置采集患者步行时竖直方向上的压力值变化、角度感应装置采用患者步行时膝关节的角度值变化、通过第二惯性测量单元和第一惯性测量单元采集顶盖与保护罩之间的空间位置变化,并将这些信息传送至控制板,由控制板内的微处理器计算患者步态及位姿信息,根据这些信息不断调整液压控制单元内阻尼大小,以适应患者的各种运动,满足患者行走、跑步、防摔、交替上下斜坡及楼梯的需求,满足患者行走、跑步、防摔、交替上下斜坡及楼梯的需求。
附图说明
[0017]
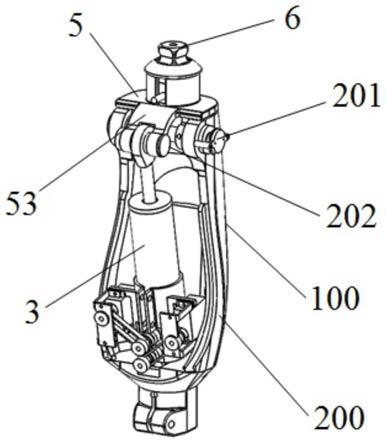
图1为本发明实施例1提供的智能液压膝关节装置的主视图;
[0018]
图2为本发明实施例1提供的智能液压膝关节装置的侧视图;
[0019]
图3为本发明实施例1提供的液压控制单元的正视图;
[0020]
图4为本发明实施例1提供的液压控制单元的爆炸图;
[0021]
图5为本发明实施例1提供的液压控制单元的液压机构的内部结构示意图;
[0022]
图6为本发明实施例1提供的液压控制单元的动力机构的结构示意图;
[0023]
图7为本发明实施例1提供的顶盖的结构示意图;
[0024]
图8为本发明实施例1提供的智能液压膝关节装置的爆炸图;
[0025]
图9为本发明实施例1提供的智能液压膝关节控制系统的内部结构示意图;
[0026]
图10为本发明实施例1提供的压力感应器的结构示意图;
[0027]
图11为本发明实施例1提供的四棱台感压盖帽的三维侧视图。
具体实施方式
[0028]
实施例1
[0029]
实施例1提供一种智能液压膝关节装置,下面对其结构进行详细描述。
[0030]
参考图1和图2,该智能液压膝关节装置包括保护罩100、骨架200、液压控制单元3、顶盖5和智能液压膝关节控制系统。
[0031]
其中,液压控制单元3设置于骨架200的内部,顶盖5设置于骨架200的顶端,保护罩100设置于骨架200的侧面。
[0032]
参考图3和图4,液压控制单元3包括液压机构1、传动机构2和动力机构,动力机构能通过传动机构2将动力传递至液压机构1,液压机构1能通过改变输油管内的流量大小来
调节阻尼大小,进而调节膝关节的屈曲速度和复位速度,以实现对膝关节的调节。
[0033]
作为一种具体的实施方式,参考图5,液压机构1包括液压缸11、活塞杆12、压缩调节旋钮130、回复调节旋钮140、海绵蓄能器10、反向单向阀131和正向单向阀141。
[0034]
活塞杆12上部伸出液压缸11,活塞杆12下部插设于液压缸11内将液压缸11分为位于上部的有活塞杆12的有杆腔部和位于下部的无活塞杆12的无杆腔部,有杆腔部和无杆腔部之间通过输油管相连通。
[0035]
具体地,无杆腔部的底部通过输油管连接压缩调节旋钮130的进油端,压缩调节旋钮130的出油端通过输油管连接至回复调节旋钮140的进油端,回复调节旋钮140的出油端通过输油管连接有杆腔部,且压缩调节旋钮130的两端并联连接有正向单向阀141,回复调节旋钮140的两端并联连接有反向单向阀131。需要指明的是,液压油的正向流通规定为有杆腔部的液压油流至无杆腔部,即正向单向阀141的作用是只能使有杆腔部内的液压油单向流至无杆腔部而不能反向流通,反向单向阀131的作用是只能使无杆腔部内的液压油单向流至有杆腔部而不能反向流通。压缩调节旋钮130和回复调节旋钮140均为调节旋钮,当分别调节压缩调节旋钮130和回复调节旋钮140时,可分别控制输油管内的反向流通时的流量大小和正向流通的流量大小。
[0036]
海绵蓄能器10有多个蓄压海绵组成,压缩调节旋钮130的出油端与回复调节旋钮140的进油端之间通过输油管与海绵蓄能器10连通。
[0037]
当活塞杆12向下压缩时,无杆腔部的油液流经压缩调节旋钮130后,一部分储存于海绵蓄能器10内,另外一部分经反向单向阀131回到有杆腔部,由于正向单向阀141处于关闭状态,反向单向阀131处于打开状态,所以只需调节压缩调节旋钮130即可对输液管内液压流量大小进行调节,实现活塞杆12相对于液压缸11压缩过程的阻尼调节。
[0038]
当活塞杆12向上伸长时,有杆腔部的油液经回复调节旋钮140后,一路直接进入海绵蓄能器10,另一路通过正向单向阀141进入无杆腔部,由于反向单向阀131处于关闭状态,正向单向阀141处于打开状态,所以只需调节回复调节旋钮140即可对输液管内液压流量大小进行调节,实现活塞杆12相对于液压缸11回复过程的阻尼调节。
[0039]
在活塞杆12向下压缩或向上伸展过程中,当输油管内的油液不足时,海绵蓄能器10内储存的液油可向无杆腔部或有杆腔部供油。
[0040]
液压缸11底部设置有压缩阻尼调节旋钮13和回复阻尼调节旋钮14,压缩阻尼调节旋钮13和回复阻尼调节旋钮14分别与压缩调节旋钮130和回复调节旋钮140相关联。即当调节压缩阻尼调节旋钮13时,压缩调节旋钮130随之调节;当调节回复阻尼调节旋钮14时,回复调节旋钮140亦随之调节。通过调节压缩阻尼调节旋钮13和回复阻尼调节旋钮14,可以改变输油管内的流量大小,以调节液压阻尼大小,进而调节膝关节的屈曲速度和复位速度,实现对膝关节的调节。
[0041]
为了方便上下对接,液压缸11的底部设置有底部连接块110,活塞杆12顶部设置有关节轴承120。其中,关节轴承120设置有用于与轴连接的轴承孔,避免了装备误差等原因造成的关节内部应力产生,消除了液压缸11所受的径向力,减少了密封装置的磨损,增加了液压缸11的寿命。
[0042]
继续参考图3和图4,传动机构2包括第一从带轮151、第二从带轮152、安装支架21、左导向支架221、左主带轮231、第一同步带241以及右导向支架222、右主带轮232和第二同
步带242。
[0043]
第一从带轮151和第二从带轮152分别设置于压缩阻尼调节旋钮13和回复阻尼调节旋钮14上。
[0044]
安装支架21固定套设液压缸11的外壁,左导向支架221和右导向支架222分别设置于安装支架21的两侧。左主带轮231和右主带轮232分别设置于左导向支架221和右导向支架222内。
[0045]
左主带轮231通过第一同步带241与第一从带轮151连接,右主带轮232通过第二同步带242与第二从带轮152连接。
[0046]
继续参考图3和图4,动力机构包括分别设置于安装支架21两侧的第一动力机构31和第二动力机构32,第一动力机构31和第二动力机构32分别设置于左导向支架221和右导向支架222的内部且都通过螺钉固定于安装支架21的外壁上。
[0047]
参看图6,第一动力机构31和第二动力机构32的内部结构,均包括伺服电机41、减速器43和动力机构输出轴44。
[0048]
其中,减速器43主要由多级减速齿轮组成,伺服电机41的输出轴通过减速器43的级减速齿轮与动力机构输出轴44相连;
[0049]
第一动力机构31的动力机构输出轴44与左主带轮231通过齿轮连接,第二动力机构32的动力机构输出轴44与右主带轮232通过齿轮连接。伺服电机41输出轴经减速器43的多级减速后,直至输出的动力保持适宜。
[0050]
当活塞杆12向下压缩或向上伸长时,液压机构1通过压缩阻尼调节旋钮13及与之相配的第一从带轮151、第一同步带241、左主带轮231与第一动力机构31的动力机构输出轴44形成关联运动;液压机构1通过回复阻尼调节旋钮14及与之相配的第二从带轮152、第二同步带242、右主带轮232与第二动力机构32的动力机构输出轴44形成关联运动。
[0051]
参考图7,顶盖5包括包括盖板51、对接槽52和枢接板53,对接槽52和枢接板53分别固定于盖板51的上表面和侧面上,盖板51的底面的两侧分别设置有两个保护罩枢接孔510,枢接板53的底部的两端分别开设有两个液压控制单元枢接孔530。
[0052]
参考图8,顶盖5、骨架200和液压控制单元3之间的连接关系如下:
[0053]
顶盖5与骨架200的顶端之间通过主轴201枢接;
[0054]
顶盖5与液压控制单元3的关节轴承120之间通过第一轴202枢接;
[0055]
液压控制单元3的底部连接块110与骨架200的底端之间通过第二轴203枢接。
[0056]
具体地,骨架200的顶部两端分别开设有两个顶盖对接孔,主轴201穿过骨架200的两个顶盖对接孔和盖板51的两个保护罩枢接孔510,将骨架200和顶盖5枢接。
[0057]
第一轴202穿设枢接板53的两个液压控制单元枢接孔530和关节轴承120的轴承孔,将枢接板53与关节轴承120枢接。优选地,通过轴承枢接。
[0058]
骨架200底端开设有用于插设第二轴203的通孔,通孔内内设置有滑动轴承,通过滑动轴承与第二轴203枢接。
[0059]
进一步地,主轴201两端通过第一轴承204和第二轴承205,将骨架200和顶盖5枢接。即顶盖5通过主轴201、第一轴承204、第二轴承205和骨架2连接,具体地,第一轴承204和第二轴承205的外圈分别设置于骨架200的两个顶盖对接孔内,主轴201穿过骨架200的两个顶盖对接孔,主轴201的两端分别设置于设置于第一轴承204和第二轴承205的内圈。
[0060]
为了避免特殊情况下顶盖5的冲击,顶盖5与骨架2之间设有缓冲块209。具体地,骨架2的顶部开设有凹槽,该凹槽上上安装有缓冲块209。
[0061]
为了增强顶盖5与关节轴承120的稳定性,第一轴202的枢接处配设有螺杆206、第一耐磨垫片207和第二耐磨垫片208。为了防止第一轴202左右串动,第一轴202一端通过螺纹连接有螺杆206。由于摩擦阻尼而影响液压阻尼的效果,为了减少摩擦,第一耐磨垫片207、第二耐磨垫片208套设于螺杆206上,且第一耐磨垫片207、第二耐磨垫片208分别位于第一轴202两端与顶盖5的接触处。
[0062]
参考图9,智能液压膝关节控制系统包括一个控制板40、两个电位计42、微型电池、第二惯性测量单元50、一个压力感应装置6和一个角度感应装置7。
[0063]
其中,控制板40为型号为stm32的工业计算机控制板,该控制板40上集成有第一惯性测量单元和微处理器,微处理器用于进行回复阻尼调节旋钮14或压缩阻尼调节旋钮13应该转动的角度的计算,控制板40内内置有信号接收器等,用于接收、输出各种控制信号的功能。微型电池,用于为控制板40及其他耗电元件供电。此外,该智能液压膝关节控制系统配有备用微型电池,用于电量极小断电保护。在断电时关节立刻智能锁死屈膝阻尼避免摔跤,回复阻尼智能调节到最小,在关节回复到甚至状态后使患者可以直腿行走。
[0064]
控制板40和微型电池设置于保护罩1上,微型电池与控制板40的微处理器通过有线相连接。
[0065]
如图6所示,两个电位计42分别设置于第一动力机构31和第二动力机构32的动力机构输出轴44上,用于检测并记录动力机构输出轴44转过的角度。第一动力机构31和第二动力机构32的伺服电机41、电位计42均通过有线与控制板40相连。电位计42检测并记录动力机构输出轴44转过的角度,并将信息传递至控制板40,控制板40的微处理器利用动力机构输出轴44的转动角度进而计算出回复阻尼调节旋钮14或压缩阻尼调节旋钮13应该转动的角度,从而实现动态控制液压机构1的液压阻尼大小,以满足患者行走、跑步、防摔、交替腿上下斜坡及楼梯的需求。
[0066]
第二惯性测量50单元设置于顶盖5底部,与保护罩1上的第一惯性测量单元通过有线连接。
[0067]
第二惯性测量单元发出的信号被第一惯性测量单元所接受,第一惯性测量单元和第二惯性测量单元相互配合工作,通过微处理器计算出患者当前位姿。
[0068]
其中,惯性测量单元,其全称是inertial measurement unit,简称为imu,测量物体三轴姿态角或角速率以及加速度的装置。一般地,一个imu包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态,在导航中有着很重要的应用价值。由此可知,惯性测量单元是成熟的现有技术,可用于测出自身空间位置关系和角加速度,这里不再赘述。
[0069]
压力感应装置6设置于顶盖5上。参看图8、图10和图11,压力感应装置6包括一个四棱台感压盖帽61、一个压力传感器62和一个连接螺杆63,该四棱台感压盖帽61的上表面为四棱台结构,该四棱台感压盖帽61的底部开设有螺纹孔,该四棱台感压盖帽61的螺纹孔与压力传感器62通过连接螺杆63连接。
[0070]
作为一种具体的实施方式,压力传感器62底部有3个螺纹孔,压力传感器62通过3
个螺钉与顶盖5的对接槽52连接。
[0071]
压力传感器62的底部设有凸起,顶盖5顶部的对接槽52与压力传感器62的底部凸起相匹配,安装好后顶盖5的对接槽52对压力传感器62形成约束,以确保压力传感器62只受竖直方向的力。
[0072]
压力传感器62与控制板40通过有线相连接。
[0073]
由于压力传感器62顶部通过连接螺杆63与四棱台感压盖帽61连接,因此四棱台感压盖帽61受到的拉压力可被压力传感器62感知。压力传感器62与控制板40通过有线相连接,压力传感器62感知的压力值可以传送至控制板40的微处理器。控制板40可以向第一动力机构31和/或第二动力机构32的伺服电机41和减速器43发送指令,控制动力机构输出轴44的转速,进而通过传动机构2控制回复阻尼调节旋钮14或压缩阻尼调节旋钮13旋转。
[0074]
压力传感器62用于检测关节受力情况,与第一惯性测量单元和第二惯性测量单元50以及下面的角度传感器共同确定患者当前步态信息。
[0075]
继续参考图8,角度感应装置7包括角度感应螺杆71、磁铁72、角度传感器芯片73和角感支架74,
[0076]
主轴201的一端通过螺纹连接有角度感应螺杆71,
[0077]
角度感应螺杆71上设有一螺杆凹槽,磁铁72装入该螺杆凹槽内,
[0078]
角度传感器芯片73安装在角感支架74上,
[0079]
角感支架74通过螺钉与角度感应螺杆71连接;
[0080]
角度传感器芯片73与磁铁72构成角度传感器,用于检测出当前膝关节的屈曲角度。其中,角度传感器芯片73通过有线与控制板40相连,可以将检测到的膝关节屈曲角度信息及时传送至控制板40。
[0081]
角度感应装置7的工作原理:角度传感器芯片73固定在角感支架74上,角感支架74固定在骨架200上无法运动,磁铁72固定在角度感应螺杆71上,角度感应螺杆71与主轴201在一起,主轴201通过顶盖5上的螺纹孔用顶丝连接在一起,当膝关节转动时主轴201转动,磁铁72同时转动引发磁场发生变化,该磁场变化信息被角度传感器芯片73所感知,并将其传送至控制板40。
[0082]
为了提高顶盖5与骨架200之际连接的稳定性,该角度感应装置7还包括第三耐磨垫片75和第四耐磨垫片76,第三耐磨垫片75、第四耐磨垫片76套设于主轴201上的角度感应螺杆71上,且位于主轴201的两端与骨架2的接触处。
[0083]
本发明公开的智能液压膝关节装置中各元件的作用及工作原理:
[0084]
角度传感器芯片73与磁铁72构成角度传感器:检测膝关节转动过的角度及角速度。
[0085]
压力传感器62:检测四棱台感压盖帽61的拉压力。
[0086]
惯性测量单元:以地面为参考系,通过直接检测顶盖5的第二惯性测量50和保护罩1上的第一惯性测量单元之间的空间位置变化,间接获知了顶盖5与保护罩1之间的位置变化,由于保护罩1通常设置于小腿处,顶盖5会与大腿固定,因此进而可以检测大腿及小腿的空间位置及角加速度变化情况。
[0087]
行走分为摆动期及站立期两部分:
[0088]
当进入站立期时,患者假肢脚后跟着地,此时分两种情况。
[0089]
情况一:
[0090]
进入站立期时患者假肢未完全伸直,着地后突然屈膝,此时压力传感器62未检测到力,
[0091]
第二惯性测量50和第一惯性测量单元及角度传感器检测到假肢大腿与小腿角速度及角加速度、空间位置关系异常,将信号传递给控制板40;
[0092]
然后控制板40通过控制伺服电机41、减速器43和电位计42来控制液压控制单元3将屈膝阻尼调节至最大避免摔跤。
[0093]
当患者脱离此状态站直过程中,第二惯性测量50和第一惯性测量单元及角度传感器检测假肢大腿与小腿角度变化平稳,角加速度很小。
[0094]
将信号传递给保护罩100上的控制板40,然后控制板40控制液压控制单元3将屈膝阻尼调节至一般状态。
[0095]
情况二:
[0096]
进入站立期时患者假肢完全伸直,着地后压力传感器62检测到较大力,此时压力传感器62将信号传递给控制板40;
[0097]
然后控制板40通过控制伺服电机41、减速器43和电位计42来控制液压控制单元3将屈膝阻尼调节至最大无法屈腿保证安全;
[0098]
在整个站立期压力传感器62均可检测到力,故整个站立期屈膝阻尼均为最大。在站立期结束摆动期开始时,脚尖离地压力传感器62不再检测到力,信号传递给保护罩100上电路板的控制板40;
[0099]
然后控制板40控制液压控制单元3将屈膝阻尼调节至行走所需值。
[0100]
摆动期分为屈腿及伸腿两个阶段,屈腿阶段时,第二惯性测量50和第一惯性测量单元及角度传感器采集膝关节角度及角速度、角加速度和空间位置关系将信号传递给控制板40,微处理器经过分析计算将信号传递给液压控制单元3,调节屈膝阻尼控制屈腿速度。
[0101]
摆腿阶段时,第二惯性测量50和第一惯性测量单元及角度传感器采集膝关节角度及角速度、角加速度、空间位置关系将信号传递给控制板40,控制板40上微处理器经过分析计算将信号传递给液压控制单元3,调节屈膝阻尼控制摆腿速度。
[0102]
由于智能液压膝关节站立期阻尼为最大,关节锁死无须担心摔跤问题,患者步态问题存在于摆动期,摆动期,第二惯性测量50和第一惯性测量单元及角度传感器采集到的患者关节空间位置关系、角度、大小腿角速度及角加速度信息传递给控制板40,汇总到微处理器进行对比分析即可发现患者步态中存在的问题。
[0103]
跑步基本等同于行走状态,此跑步为慢跑,第二惯性测量50和第一惯性测量单元的角速度、角加速度变化较小,不会影响到走路中的防摔功能。
[0104]
交替上下斜坡及上下楼梯时,先抬腿将假肢抬高到一个较高角度,进入上下楼梯及斜坡模式,再次将假肢抬高到同一较高角度时,假肢退出上下楼梯及斜坡模式。此模式防摔功能同之前。
[0105]
交替上斜坡及楼梯时,控制类似于行走中的摆动期,只是屈膝伸展阻尼值大小的区别。交替下楼梯及斜坡时,脚跟着地时需向下略微踩一下,使压力传感器62检测到压力,控制屈膝阻尼调节至最大,其余控制类似于行走中的站立期。
[0106]
液压控制单元3具有上电复位功能,控制板40有备用微型电池,关节电池耗尽后,
液压控制单元3断电然后接入备用电池,液压控制单元3上电复位,屈膝阻尼调节至最大,回复阻尼调节至较小水平。
[0107]
虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1