一种微型机器人给药装置及给药系统的制作方法
1.本发明属于药物递送领域。具体地,本发明涉及一种微型机器人给药装置及给药系统。
背景技术:
2.纳米技术作为克服生理屏障的一种重要方法,可增强多种药物的治疗效果,但纳米粒的递送受到粒径、表面修饰、亲水性及其他物理化学特性的限制。paul提出“魔法子弹”的假设后的一百多年间,一直激励着药学家们致力于开发研究“直接进入体内靶部位且只与靶标物相互作用的药物”,这一概念得到了更广泛和更深层次的扩展和延伸。微/纳米机器人作为一种新颖的“魔法子弹”因其独特的优势引起了科学家们的广泛兴趣。微/纳米机器人是指将能量(如电能、化学能等)转化为动能的微纳米级装置,它为将诊断、治疗药物主动递入病灶提供可能。微/纳米机器人通常具有以下三个模块:a)运输模块,将药物递送至靶部位;b)识别模块,精确识别病灶部位信息并释放药物;c)荷载模块,装载有效治疗量或诊断量的药物。随着研究者们对微/纳米机器人的研究不断深入,在识别、控制、优化生物相容性等方面都取得了显著进展,呈现出广阔的生物医学应用前景。
3.目前微/纳米机器人的推动机制主要分为燃料驱动与非燃料驱动。燃料驱动指通过外加因素催化微纳米机器人内燃料的分解,产生气泡,推动装置运动,常用的驱动燃料如h2o2、酸/碱、脲酶等。如au
‑
pt双金属纳米棒形成原电池,电解h2o2溶液,可瞬间产生大量气泡从而驱动装置运动,具有速度快的优点,但存在寿命短,受环境限制等不足。非燃料驱动是指通过外加场力,如超声波、磁场、电场等驱动微纳米机器人的运动。例如,以自热电泳为动力源的双面介孔二氧化硅颗粒,在近红外光照射下,在金半壳层上产生局域光热效应进而形成热梯度,产生的自热泳动可以主动驱动纳米马达以快速移动,可远程无线遥控微纳米机器人的运动,但强激光易对生物样品造成损伤。
4.尽管不同驱动机制下微纳米机器人具有独特的优点,但它们在体内的应用潜力仍面临重大挑战。其中包括穿透组织屏障和细胞膜所需的推力以及多次运动的能力。例如:以干化学分散剂为燃料的微型递药装置,遇水产生气泡作为驱动力,但内部燃料一次性耗尽且动力无法穿透组织,极大地限制其作为药物运输载体的功效。
技术实现要素:
5.本发明的首要目的在于提供一种微型机器人给药装置。
6.本发明的另一目的在于提供一种微型机器人给药系统。
7.本发明的另一目的在于提供所述的微型机器人给药装置的制备方法。
8.本发明所采取的技术方案是:
9.一种微型机器人给药装置,包括结构系统、位于所述的结构系统内的动力系统以及活性分子;所述的结构系统为微管;所述的动力系统包括一级动力系统和二级动力系统;所述的一级动力系统和二级动力系统均包括相变物质,所述的一级动力系统的相变物质和
二级动力系统的相变物质具有不同的声致液滴蒸发特性;所述的一级动力系统用于实现微型机器人给药装置的自主运动,所述的二级动力系统用于递送活性分子。
10.根据本发明所述的微型机器人给药装置是指在空间、时间及剂量上全面调控活性分子在生物体内分布的技术体系。其目标是为了在恰当的时机将适量的活性分子递送到正确的位置,从而增加活性分子的利用效率,提高疗效,降低成本,减少毒副作用。
11.所述的微管优选为磁性微管;更优选为氨基功能化的磁性微管。
12.所述的微管的外壳优选为无机物、聚合物、金属材料和多层复合材料中的至少一种;更优选为无机物。
13.所述无机物包括sio2。
14.所述聚合物包括海藻酸钠、壳聚糖。
15.所述金属材料包括金、铂。
16.所述多层复合材料包括海藻酸钠和铂的复合材料、金和铂的复合材料。
17.所述的微管的制备方法包括但不限于:层层自组装技术、电化学沉积法、化学镀法、自卷曲法、增材制造法;优选为层层自组装技术。
18.所述的微管优选为具有不对称结构的管状空心外壳;更优选为两个端口不对称的管状空心外壳;最优选为具有不同直径的两个端口的管状空心外壳。
19.所述的微管的大端口的直径优选为0.1~20.0μm;更优选为0.1~10.0μm;最优选为2.0~5.0μm。
20.所述的磁性微管优选通过静电吸引力将磁性粒子组装到所述的微管中,以实现外源磁场对于本发明的结构系统的运动方向的控制,使本发明的结构系统快速地指向靶向区域。
21.所述的磁性粒子优选为磁性纳米粒子;更优选为fe3o4纳米粒。
22.所述的磁性粒子的粒径优选为1~100nm;更优选为1~50nm;最优选为20nm。
23.所述的磁性微管中磁性粒子的层数优选为2~6层;更优选为3~4层;最优选为3层。
24.所述的氨基功能化的磁性微管优选通过有机胺类进行氨基功能化得到;更优选通过3
‑
氨丙基三乙氧基硅烷进行氨基功能化得到。
25.所述的相变物质优选为全氟化碳;更优选为全氟戊烷(pfn)、全氟己烷(pfh)、全氟庚烷、全氟辛烷、全氟溴辛烷、全氟壬烷中的至少一种。
26.所述的全氟化碳是指氢全部被氟取代的烷烃。
27.所述的相变物质优选被制备成亚微乳的形式。
28.所述的亚微乳优选通过如下步骤得到:将经加热的磷酸盐缓冲液加入表面活性剂涡旋震荡,随后加入相变物质,冰浴探头超声,得到亚微乳。
29.所述的加热的条件优选为85~95℃水浴4~6min;更优选为90℃水浴5min。
30.所述的表面活性剂优选为水溶性阴离子氟碳表面活性剂。
31.所述的磷酸盐缓冲液、表面活性剂及相变物质按体积比优选为(14
‑
20):1:(1~3);更优选为17:1:2。
32.所述的超声的条件优选为超声功率110~130w、工作时间0.5~1.5s、工作间隔1~3s、工作次数55~65次;更优选为超声功率110~120w、工作时间0.5~1s、工作间隔1~2s、
工作次数55~60次。
33.所述的一级动力系统的相变物质优选通过共价键、分子间作用力或静电作用吸附至微管;更优选通过静电作用吸附至微管。
34.所述的活性分子优选为药物、标记物、造影剂中的至少一种。
35.所述的活性分子优选被制成纳米粒的形式。
36.所述的纳米粒优选通过如下步骤得到:将壳聚糖溶于醋酸,调节ph至5.2~5.3,第一次搅拌,得到混合液a;取活性分子溶于溶剂中,然后加入多聚磷酸钠混合,得到混合液b;接着将混合液b加入混合液a中,第二次搅拌、离心去沉淀,最后将上清液浓缩,得到纳米粒。
37.所述溶剂优选为吐温
‑
80、水、乙醇、甘油、聚乙二醇、丙二醇、液状石蜡、植物油中的至少一种。
38.所述的壳聚糖的浓度优选为2~3mg/ml;更优选为2.5mg/ml。
39.所述的醋酸优选为1%醋酸。
40.所述的第一次搅拌的条件优选为室温下磁力搅拌。
41.所述的室温优选为20~30℃;更优选为24~26℃。
42.所述的活性分子、多聚磷酸钠、溶剂按质量(mg)、质量(mg)、体积(μl)比优选为1:(4~6):(23~27);更优选为1:5:25。
43.所述的混合液b的加入方式优选为逐滴加入。
44.所述的第二次搅拌的条件优选为室温下搅拌0.5h。
45.所述的离心条件优选为1800~2200rpm下离心8~12min;更优选为2000rpm下离心10min。
46.所述的浓缩的条件优选为采用超滤法浓缩8~12倍;更优选为采用超滤法浓缩10倍。
47.所述的纳米粒的粒径优选为180~220nm;更优选为200nm。
48.所述的活性分子和所述的二级动力系统的相变物质优选与明胶混合,以起到固定作用,方便装载于微管中。明胶被递送至体内后,在正常体温下,逐渐变为溶胶态,这可以减小活性分子与装置内壁间之间的摩擦力,便于将活性分子发射出所述微管。
49.本发明的微型机器人给药装置利用一级动力系统和二级动力系统的相变物质具有不同的声致液滴蒸发特性,借助能够产生具有时空控制能力的超声波触发信号的超声发射平台,分别触发一级动力系统和二级动力系统的相变物质由液相变为气相,利用其产生的能量,从而使得一级动力系统实现微型机器人给药装置的自主运动,突破第一层生物屏障;二级动力系统实现活性分子的发射,突破第二层生物屏障;为活性分子主动连续克服生物屏障,从而直接递送至靶部位提供了可能性。
50.另外,本发明的微型机器人给药装置的微管内含有磁性粒子,可以在外加磁场的引导下,控制微型机器人给药装置的微管朝向,实现方向可控的靶向发射。
51.一种给药系统,包含所述的微型机器人给药装置。
52.所述的给药系统还包含控制系统。
53.所述的控制系统优选为超声发射平台和电磁铁控制平台。
54.所述的超声发射平台优选包括pxi信号发生器、射频放大器、阻抗匹配器和超声波换能器。
55.所述的电磁铁控制平台优选为直流电磁铁。
56.所述的微型机器人给药装置的制备方法,优选包括以下步骤:
57.1)一级动力系统吸附到微管;
58.2)二级动力系统的相变物质与明胶、活性分子混合,得到混合液;
59.3)步骤2)得到的混合液装载到微管内。
60.步骤1)中所述的微管的构建的方法包括但不限于:层层自组装技术、电化学沉积法、化学镀法;优选为层层自主装技术。
61.步骤1)中包括在微管内组装磁性粒子。
62.所述的磁性粒子的层数优选为2~6层;更优选为3~4层;最优选为3层。
63.所述的磁性粒子优选为磁性纳米粒子;更优选为fe3o4纳米粒。
64.所述的磁性粒子的粒径优选为1~100nm;更优选为1~50nm;最优选为20nm。
65.步骤1)中还包括对微管进行氨基功能化。
66.所述的氨基功能化的步骤优选为:取水、无水乙醇、有机胺类物质混合,超声,得到混合液;接着,将微管浸入混合液中孵育。
67.所述的水、无水乙醇、有机胺类物质按体积比优选为40:(0.5~1.5):(0.5~1.5);更优选为40:1:1。
68.所述的有机胺类物质优选为3
‑
氨丙基三乙氧基硅烷。
69.所述的超声的条件优选为22~27℃水浴超声8~12min;更优选为25℃水浴超声10min。
70.所述的孵育的条件优选为38~42℃下120~160rpm孵育5~7h;更优选为40℃下140rpm孵育6h。
71.步骤1)中所述的一级动力系统的相变物质优选通过共价键、分子间作用力或静电作用吸附至微管;更优选通过静电作用吸附至微管。
72.步骤2)所述的活性分子优选制成纳米粒的形式。
73.所述的纳米粒优选通过如下步骤得到:将壳聚糖溶于醋酸,调节ph至5.2
‑
5.3,第一次搅拌,得到混合液a;取活性分子溶于溶剂,然后加入多聚磷酸钠混合,得到混合液b;接着将混合液b加入混合液a中,第二次搅拌、离心去沉淀,最后将上清液浓缩,得到纳米粒。
74.所述溶剂优选为吐温
‑
80、水、乙醇、甘油、聚乙二醇、丙二醇、液状石蜡、植物油中的至少一种。
75.所述的壳聚糖在醋酸中的浓度优选为2~3mg/ml;更优选为2.5mg/ml。
76.所述的醋酸优选为1%醋酸。
77.所述的第一次搅拌的条件优选为室温下磁力搅拌。
78.所述的室温优选为20~30℃;更优选为24~26℃。
79.所述的活性分子、多聚磷酸钠、溶剂按质量(mg)、质量(mg)、体积(μl)比优选为1:4~6:23~27;更优选为1:5:25。
80.所述的混合液b的加入方式优选为逐滴加入。
81.所述的第二次搅拌的条件优选为室温下搅拌0.5h。
82.所述的离心条件优选为1800~2200rpm下离心8~12min;更优选为2000rpm下离心10min。
83.所述的浓缩的条件优选为采用超滤法浓缩8~12倍;更优选为采用超滤法浓缩10倍。
84.所述的纳米粒的粒径优选为180~220nm;更优选为200nm。
85.步骤3)所述的装载的步骤优选为:将步骤1)得到的吸附一级动力系统的微管置于过滤器中,将混合液加入过滤器中,保证混合液充满微管。
86.本发明的有益效果是:
87.本发明构建了一种微型机器人给药装置,通过将具有不同声致液滴蒸发特性的相变物质亚微乳固定在结构系统内,借助能够产生具有时空控制能力的超声波触发信号的超声发射平台,利用相变物质在不同特性超声处理下产生能量转换的特性,可以实现微型机器人给药装置的自主运动和递送活性分子,为实现活性分子的二级发射,从而直接递送至靶部位提供了可能性。同时,本发明的微型机器人给药装置具有生物相容性好,制备简单,方向可控、安全性高等优点。
附图说明
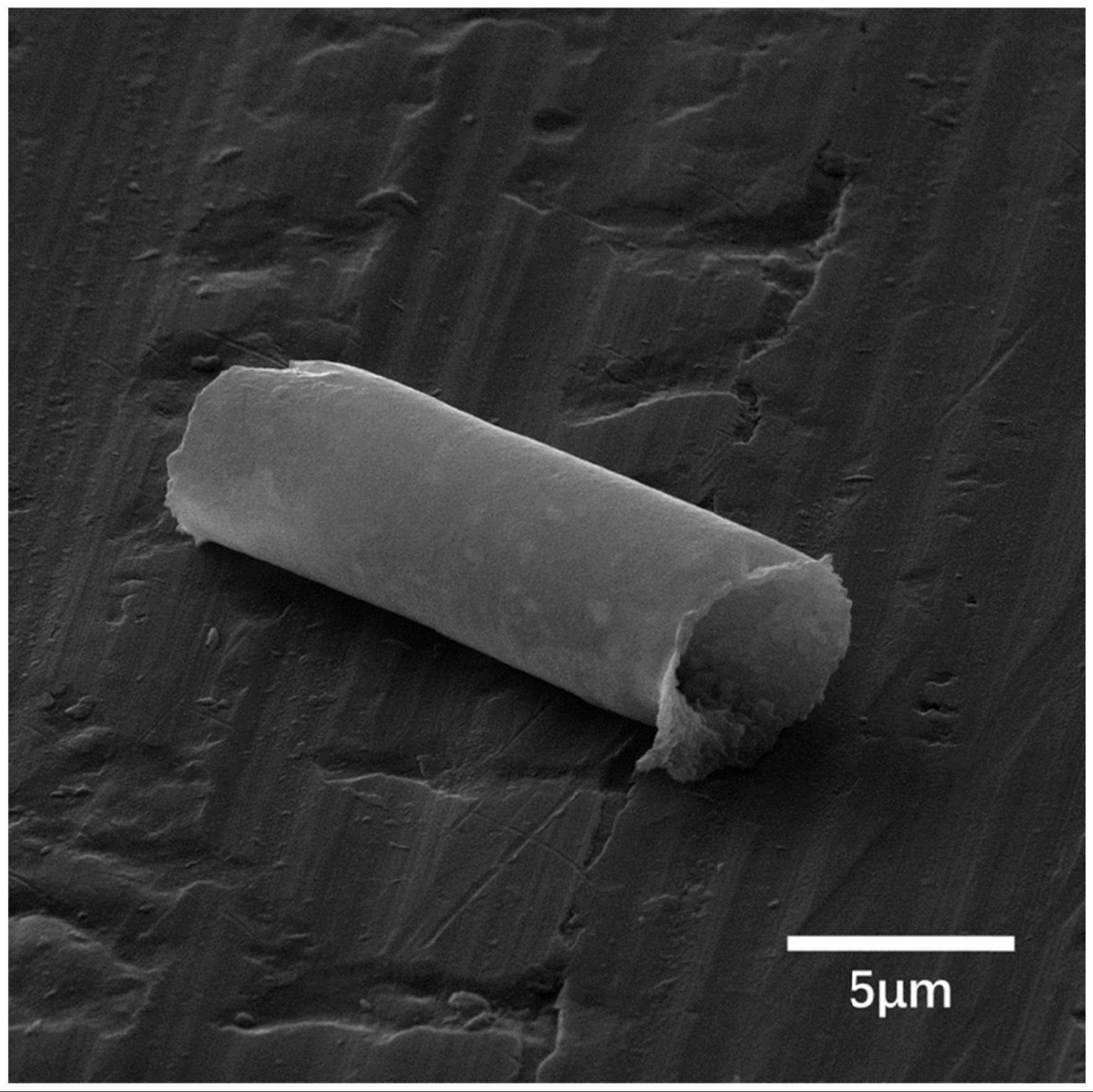
88.图1是从聚碳酸酯模板中释放的氨基功能化的磁性微管(三层二氧化硅)的电镜图。
89.图2是普通微管、磁性微管以及fe3o4纳米粒(fe3o
4 nps)直接装载的磁性微管的磁性强度表征图:其中,a为从聚碳酸酯模板中释放的普通微管、磁性微管以及fe3o
4 nps直接装载的磁性微管中fe3o4的含量图;b为从聚碳酸酯模板中释放的磁性微管以及fe3o
4 nps直接装载的磁性微管的磁化强度图;图中“微管”表示“普通微管”,“优化后的磁性微管”表示“磁性微管”,“磁性微管”表示“fe3o
4 nps直接装载的磁性微管”。
90.图3是从聚碳酸酯模板中释放的普通微管、磁性微管、氨基功能化的磁性微管以及二氧化硅的傅里叶红外光谱图;其中,sio
2 mt是从聚碳酸酯模板中释放的普通微管;magnetic mt是从聚碳酸酯模板中释放的磁性微管;functionalized magnetic mt是从聚碳酸酯模板中释放的氨基功能化的磁性微管。
91.图4是不同特性全氟化碳亚微乳的粒径图:其中,a是pfh亚微乳的粒径分布图;b是pfn亚微乳的粒径分布图;c是pfh亚微乳及pfn亚微乳四天内的粒径变化图。
92.图5是不同特性全氟化碳亚微乳的电位图:其中,a是pfh亚微乳的电位图;b是pfn亚微乳的电位图;c是pfh亚微乳及pfn亚微乳四天内的电位变化图。
93.图6是氨基功能化的磁性微管和磁性微管对pfh亚微乳吸附性的结果图:其中,a是标尺为20μm时,氨基功能化的磁性微管吸附荧光pfh亚微乳的激光扫描共聚焦显微镜图;b是标尺为20μm时,磁性微管吸附荧光pfh亚微乳的激光扫描共聚焦显微镜图。
94.图7是不同装载时间的微型机器人给药装置的3d图:其中,a是注射器中空气加热时间为0s,所得到的微型机器人给药装置的3d图;b是注射器中空气加热时间为5s,所得到的微型机器人给药装置的3d图;c是注射器中空气加热时间为10s,所得到的微型机器人给药装置的3d图;d是注射器中空气加热时间为15s,所得到的微型机器人给药装置的3d图。
95.图8是微型机器人给药装置的在凝胶中运动及发射痕迹的3d图:其中,a是微型机器人给药装置的一级动力源在凝胶中的分布的3d图;b是微型机器人给药装置的内容物在凝胶中的分布的3d图;c是微型机器人给药装置的一级动力源与内容物在凝胶中的分布的
3d图。
96.图9是微型机器人给药装置处理后鼓膜的激光扫描共聚焦显微镜3d图。
97.图10是不同处理后圆窗膜的激光扫描共聚焦显微镜图:其中,a是去离子水处理后(空白对照组)圆窗膜的激光扫描共聚焦显微镜图;b是壳聚糖纳米粒浓缩液处理后(纳米粒溶液组)圆窗膜的激光扫描共聚焦显微镜图;c是微型机器人给药装置处理后(微型机器人给药装置组)圆窗膜的激光扫描共聚焦显微镜图。
98.图11是壳聚糖纳米粒(cs nps)和氨基功能化的磁性微管对l929细胞和hei
‑
oc1细胞的存活率的影响图:其中,a是不同浓度的cs nps对l929细胞和hei
‑
oc1细胞存活率的影响图;b是不同浓度的氨基功能化的磁性微管对l929细胞和hei
‑
oc1细胞的存活率的影响图。
99.图12是微型机器人给药装置的示意图:图中,1
‑
微型机器人给药装置;111
‑
微管;112
‑
一级动力系统;113
‑
明胶;114
‑
二级动力系统;115
‑
活性分子。
具体实施方式
100.以下所述是本发明的优选实施方式,应当指出,对于本技术领域技术人员来说,在不脱离本发明基本原理的前提下,可以做出若干改进,这些改进也视为在本发明的范围内。下面分通过具体实施方式对本发明进行详细说明。但是,应当理解,本发明并不限定于以下的具体实施方式。本发明的保护范围由权利要求书来定义,在其范围内,可以对本发明下述实施方式进行任意改变和组合。
101.下面将结合具体实施例,进一步解释本发明。
102.实施例
103.实施例1微管的制备
104.1)普通微管的制备
105.将孔径为5μm的聚碳酸酯薄膜模板装于10ml ep管(微型离心管,eppendorf)中,且薄膜亮面贴ep管壁,向ep管中加入5ml四氯化硅,使四氯化硅溶液浸没聚碳酸酯薄膜模板,通过静电吸附在聚碳酸酯薄膜模板内部吸附一层四氯化硅,时间为10min。弃去四氯化硅溶液,用干燥的四氯化碳溶液反复仔细清洗3
‑
4次,每次5ml,清洗后将聚碳酸酯薄膜模板放于蒸发皿,于65℃鼓风干燥箱中干燥1h。干燥后将聚碳酸酯薄膜模板用湿棉签蘸取三氧化二铝粉末轻轻打磨,除去在聚碳酸酯膜模板表面形成的多余二氧化硅,并用去离子水仔细清洗。接着,将聚碳酸酯薄膜模板浸泡去离子水中处理30min。用滤纸吸干薄膜模板上的液体,并将聚碳酸酯薄膜模板放于蒸发皿,于65℃烘箱中干燥2h。重复上述实验步骤3次可制得三层夹心巧克力棒状中空二氧化硅微管,即普通微管。
106.2)柠檬酸钠稳定fe3o4纳米粒(fe3o
4 nps)的制备
107.取320mg fe3o4纳米粒(平均粒径为20nm)分散于14ml 0.3m柠檬酸钠溶液中,超声处理10min后,80℃机械搅拌(水浴锅内完成)1h,并冷却至室温。使用铷铁硼磁铁吸附上述柠檬酸钠稳定的fe3o
4 nps,弃去上清液后,用去离子水稀释至40ml后得8mg/ml fe3o4纳米粒溶液,4℃冰箱中保存,备用。
108.3)壳聚糖溶液的配制
109.取30mg壳聚糖(脱乙酰度85%,566cps),加入30ml 1%乙酸,不断搅拌至溶解,制
得1mg/ml壳聚糖溶液,将溶液存放于4℃环境,使用前先通过0.45μm孔径过滤膜。
110.4)磁性微管的制备
111.将孔径为5μm的聚碳酸酯薄膜模板浸泡在步骤3)得到的1mg/ml壳聚糖溶液中30min后,用步骤2)得到的8mg/ml柠檬酸钠稳定的四氧化三铁纳米粒溶液处理30min,接着取聚碳酸酯薄膜模板装于10ml ep管(微型离心管,eppendorf)中,且薄膜亮面贴ep管壁,向ep管中加入5ml四氯化硅,使四氯化硅溶液浸没聚碳酸酯薄膜模板,通过静电吸附在聚碳酸酯薄膜模板内部吸附一层四氯化硅,时间为10min。弃去四氯化硅溶液,用干燥的四氯化碳溶液反复仔细清洗3
‑
4次,每次5ml,清洗后将聚碳酸酯薄膜模板放于蒸发皿,于65℃鼓风干燥箱中干燥1h。干燥后将聚碳酸酯薄膜模板用湿棉签蘸取三氧化二铝粉末轻轻打磨,除去在聚碳酸酯膜模板表面形成的多余二氧化硅,并用去离子水仔细清洗。重复上述实验步骤3次,制得三层夹心巧克力棒状中空二氧化硅微管,即磁性微管。
112.5)氨基功能化的磁性微管的制备
113.取8ml去离子水,加入0.2ml无水乙醇和0.2ml 3
‑
氨丙基三乙氧基硅烷(3
‑
(aminopropyl)triethoxysilane,aptes),水浴(25℃)超声10min,得到混合液;将步骤4)得到的磁性微管浸入混合液,40℃汽浴振荡培养箱中振荡(140rpm)反应孵育6h,反应完毕后,分别用无水乙醇和去离子水清洗模板,去除表面未反应的游离3
‑
氨丙基三乙氧基硅烷,得到氨基功能化的磁性微管。
114.实施例2全氟化碳乳剂的制备与装载
115.1)全氟化碳乳剂的制备
116.探头超声法制备全氟壬烷(pfn)亚微乳:取850μl磷酸盐缓冲液(pbs,0.1m,ph 7.2
‑
7.3)于2ml ep管中90℃水浴加热5min,迅速加入50μl水溶性阴离子氟碳表面活性剂(zonyl fse,上海舰邦实业有限公司)涡旋均质化后,加入100μl pfn液体(sigma
‑
aldrich),冰浴探头超声,超声功率120w,工作时间1s,工作间隔2s,工作次数60次,短暂的工作时间可以防止产生大量泡沫,防止局部过热。得到体积分数10%的pfn亚微乳,使用前用pbs(0.1m,ph 7.2
‑
7.3)稀释至1%。
117.探头超声法制备全氟己烷(pfh)亚微乳:2ml ep管中加入850μl pbs(0.1m,ph 7.2
‑
7.3),并于90℃水浴锅中加热5min,加入50μl水溶性阴离子氟碳表面活性剂(zonyl fse,上海舰邦实业有限公司),涡旋均质化。加入10μl含香豆素6(coumarin 6)的二氯甲烷溶液(1mg/ml)和100μl的pfh液体(aladdin),涡旋,均质化。冰浴探头超声,超声功率120w,超声时间1s,间隔时间2s,工作次数60次。得体积分数为10%的pfh亚微乳,使用前用pbs(0.1m,ph 7.2
‑
7.3)将溶液稀释至1%。
118.2)壳聚糖纳米粒(chitosan nanoparticles,cs nps)的制备
119.采用离子交联法制备cs nps:取62.5mg壳聚糖(分子量10w)溶于25ml 1%醋酸中,用1m氢氧化钠调节ph至5.2
‑
5.3,26℃下磁力搅拌,得到混合液a;用50μl吐温80溶解2mg尼罗红(nile red)然后和10ml 1mg/ml的多聚磷酸钠混合,得到混合液b;将混合液b逐滴加入混合液a中,26℃下搅拌0.5h,所得溶液于2000rpm下离心10min后弃去沉淀,上清液用超滤法浓缩10倍,得粒径在200nm左右的cs nps浓缩液,4℃冰箱保存,备用。
120.3)pfh亚微乳的吸附
121.将实施例1中步骤5)得到的氨基功能化的磁性微管浸入实施例2步骤1)得到的体
积比为1%的pfh亚微乳中,常温震荡(400rpm)孵育12h后,取出,使用大量去离子水重复清洗,去除未结合的pfh亚微乳。
122.4)pfn亚微乳和有效负荷的装载
123.将4.8g明胶完全溶于10ml 55℃的去离子水中,得到480mg/ml的明胶溶液,将明胶溶液、实施例2中步骤1)得到的体积比为1%的pfn亚微乳、实施例2中步骤2)得到的cs nps浓缩液按体积比1:2:1的比例混合,备用。将实施例2中步骤3)得到的吸附好pfh亚微乳的微管置于可拆卸式滤头中(直径13mm),使用一次性注射器装载上述明胶、pfn亚微乳和cs nps的混合溶液,保证混合溶液充满整个微管内,将注射器与装有模板可拆卸式滤头放置于50℃水浴,水浴时间为10s,此处装载完成后,得到微型机器人给药装置(如图12所示),将其立即置于0℃冰水中冷却,之后于4℃环境中保存备用。
124.实施例3超声发射平台的搭建
125.超声发射平台由pxi信号发生器、射频放大器、阻抗匹配器和超声波换能器组成。同时搭建了适用于体内外实验的装置。使用ni labview软件建立了超声发生器的驱动程序,用以设定合适的信号函数;使用光纤水听器测试系统对超声发射平台的声学性能进行考察;通过理论计算和文献查阅确定了两种不同亚微乳的超声触发参数,一级超声参数为2.25mhz中心频率,20μs作用时间,二级超声参数为4mhz中心频率,10ms作用时间。
126.效果实施例
127.效果实施例1递送装置的表征
128.向实施例1步骤4)得到的氨基功能化的磁性微管中加入足量的二氯甲烷溶液溶解聚碳酸酯模板,然后用铷铁硼磁铁吸附进行收集;重复5次除去残留的聚碳酸酯,得到去除聚碳酸酯模板的氨基功能化的磁性微管。
129.1)微管的形态学考察
130.将从聚碳酸酯模板中释放的氨基功能化的磁性微管分别重新分散在无水乙醇后,得到混悬液;分别取100μl混悬液滴加在载玻片上,待溶剂挥发后,用光学显微镜观察微管形态;分别取10μl混悬液滴加在硅片上常温干燥,用导电胶贴于样品台上,经减压喷金处理后,使用扫描电子显微镜(sem)观察微管的形态,结果如图1所示:从中可以看出,氨基功能化的磁性微管呈现出类似于夹心巧克力棒状结构,微管两端外径大小相仿,较大一端约5μm,较小端约4μm。
131.2)微管的磁性考察
132.将从聚碳酸酯模板中释放(聚碳酸酯模板的释放方法与本效果实施例前列相同)的普通微管、磁性微管以及fe3o
4 nps直接装载的磁性微管(制备方法与磁性微管相同,区别仅在于fe3o
4 nps未用柠檬酸钠稳定)分别使用鼓风干燥箱在65℃下干燥12h后,用振动样品磁强计(vsm,vibrating sample magnetometer)在
‑
20k oe到20k oe的磁场强度中,300k下,对样品的磁学性质进行测定;同时,通过邻菲咯啉分光光度法测定从聚碳酸酯模板中释放的普通微管、磁性微管以及fe3o4 nps直接装载的磁性微管中fe3o4的含量,结果如图2所示:通过vsm测定所制备的磁性微管的饱和磁化强度可知,将超顺磁性fe3o
4 nps装载在无机sio2微管中,赋予了sio2微管超顺磁性。虽然简单的将普通fe3o
4 nps装载在微管中(fe3o
4 nps直接装载的磁性微管)即可使sio2微管具有超顺磁性,但是鉴于其磁性较弱,我们使用柠檬酸钠对普通fe3o
4 nps进行了修饰,再将其装载到微管中。工艺改进后的磁性微管的载
磁量增加了六倍,饱和磁感应强度由0.95emu/g增加到5.26emu/g。可能是由于修饰后的fe3o
4 nps表面荷负电,增强了同sio2吸附效果。该实验结果表明,我们通过成功将fe3o
4 nps装载到sio2微管中,赋予了微管磁性性能,为微型机器人的运动和方向控制奠定了基础。
133.3)不同特性的微管的红外光谱分析
134.将从聚碳酸酯模板中释放的不同特性的无机sio
2 mt(普通微管、磁性微管以及氨基功能化的磁性微管)及sio2使用鼓风干燥箱65℃干燥12h后,分别与溴化钾混合研磨,红外灯下照射干燥20min,压片机压片后,使用傅里叶红外光谱仪在4000
‑
500cm
‑1波长范围内检测各样品的红外谱图。结果如图3所示:1106.5cm
‑1波长处存在较大且宽的si
‑
o伸缩振动吸收峰,磁性sio
2 mt在620cm
‑1波长处出现了fe3o4的fe
‑
o特征吸收峰,表明磁性sio
2 mt中成功装载了fe3o
4 nps。对于使用aptes修饰后的磁性sio
2 mt,在1500cm
‑1波长处出现了氨基的弯曲振动峰,表明成功将氨基修饰在了sio2上。
135.效果实施例2全氟化碳亚微乳的表征
136.采用nano s90激光粒度仪(英国马尔文公司)在亚微乳制备后的第1、2、3、4天分别测量实施例2步骤1)制备得到的pfh亚微乳和pfn亚微乳的粒径,结果如图4所示:制备得到的pfh亚微乳和pfn亚微乳粒径分布均一,在四天内粒径较为稳定,未发生明显的粒径变化。
137.采用zeta电位分析仪(beckman coulter)在亚微乳制备后的第1、2、3、4天分别测量实施例2步骤1)制备得到的pfh亚微乳和pfn亚微乳的电位,结果如图5所示:制备得到的pfh亚微乳和pfn亚微乳的zeta电位值为负,这为pfh亚微乳与微型机器人给药装置结构系统(微管)正电性内表面之间的静电相互作用奠定了基础;同时,两种全氟化碳亚微乳电位的短期稳定性较好。
138.效果实施例3 pfh亚微乳的吸附性考察
139.使用大量水离子水反复彻底清洗实施例1中步骤5)得到的氨基功能化的磁性微管,去除未结合的aptes;将清洗后的氨基功能化的磁性微管和实施例1中步骤4)得到的磁性微管浸入体积比为1%的pfh亚微乳中,常温震荡(400rpm)孵育12h后,将微管取出,使用大量去离子水重复清洗,去除未结合的pfh亚微乳,使用激光共聚焦显微镜观察固定在聚碳酸酯模板中的吸附荧光pfh亚微乳,结果如图6所示:氨基功能化的磁性微管能够特异性的吸附负电性的pfh亚微乳;而未进行氨基功能化修饰的磁性微管则不能够特异性的吸附pfh亚微乳;表明使用aptes对磁性微管内壁进行氨基功能化修饰能够为建立微型机器人给药装置的一级动力系统奠定物质基础。
140.效果实施例4 pfn亚微乳和有效负荷的装载时间与在微管中的装载深度之间的关系
141.制备不同装载时间的负载pfn亚微乳和cs nps的氨基功能化的磁性微管(方法与实施例2中步骤4)相同,区别仅在于水浴时间分别为0s、5s、15s,使用激光共聚焦层层扫描观察固定在聚碳酸酯模板中负载cs nps/pfn的氨基功能化的磁性微管的3d图像,结果如图7所示:随着加热时间的延长,注射器中空气的膨胀程度增大,结构系统中的内容物清除量也增加,表明通过控制注射器中空气的加热时间可以有效的控制结构系统中有效负荷的装载量。当将热时间为10s时,有效负荷装载量可达约1/2结构系统的深度。
142.效果实施例5微型机器人给药装置运动和发射能力的考察
143.1)微型机器人给药装置在凝胶中运动和发射能力的考察
144.将实施例2步骤4)制备好的微型机器人给药装置的聚碳酸酯模板用2ml ch2cl2溶解,从而释放出微型机器人给药装置,使用磁铁收集微型机器人给药装置,并使用二氯甲烷重复清洗3次,最后以8000rpm离心10min收集沉淀(去除聚碳酸酯模板的微型机器人给药装置),将沉淀物分散在1ml pbs(0.1m,ph 7.2~7.4)中,得到混悬液,并在4℃下保存,备用,注意避光,防止荧光淬灭。
145.将1.6g明胶溶于10ml 55℃的去离子水中,得到160mg/ml的明胶溶液,并吸取1ml明胶溶液滴于激光共聚焦皿底部,形成一层单薄的明胶溶液层,置于4℃冰箱中静置0.5h进行胶凝,静置时保持水平以保证形成的发射基质表面平整无凹凸。取100μl本效果实施例步骤1)得到微型机器人给药装置的混悬液滴于上述铺好发射基质的激光共聚焦皿中,随后将其浸入水浸式超声探头的聚焦焦点处,在共聚焦皿上方施加120mt匀强磁场,控制微型机器人给药装置的发射方向,并先后使用一级超声参数(1st us pulse:2.25mhz,20μs,2v,正弦波形)、二级超声参数(2nd us pulse:4mhz,10ms,2v,正弦波形)进行处理。之后分别用激光共聚焦显微镜考察凝胶中荧光痕迹微型机器人给药装置在凝胶中发射有效负荷(cs nps和pfn亚微乳)的情况,其3d重建图如图8所示:使用一级超声参数处理微型机器人给药装置后,装置实现第一次运动,其中荧光代表装置的运动轨迹(如图8中a所示);如图8中b所示,荧光表示装置内活性分子在凝胶中的分布。将两者信号叠加后可以发现(如图8中c所示),微型机器人给药装置具有二级发射能力,可将装置内活性分子递送至更深部位。
146.2)微型机器人给药装置穿透组织能力的的考察
147.使用购自南方医科大学实验动物中心(实验动物合格证号为scxk(粤)2016
‑
0041)的纯白红目豚鼠,品系fmmu,普通级,体重300~350g,鼓膜正常,耳廓反应灵敏。向豚鼠腹腔注射致死量的乌拉坦溶液(2.5g/kg),断头取听泡,小心清理骨壁,剥离鼓膜与圆窗膜。然后分别取100μl本效果实施例步骤1)得到的混悬液(微型机器人给药装置组)滴于鼓膜上,随后将其浸入水浸式超声探头的聚焦焦点处,在鼓膜上方施加120mt匀强磁场,同鼓膜平面垂直,控制微型机器人给药装置的运动方向,并用一级超声参数(1
st us pulse:2.25mhz,20μs,2v,正弦波形)进行处理。同上述方法操作圆窗膜,同时使用二级超声参数(2
nd us pulse:4mhz,10ms,2v,正弦波形)进行处理。随后使用pbs(0.1m,ph 7.2
‑
7.3)清洗鼓膜与圆窗膜,放于4%多聚甲醛溶液中固定12h后,放于pbs(0.1m,ph 7.2
‑
7.3)溶液中10min反复清洗去除固定液;将鼓膜与圆窗膜置于96孔板中,加入200μl 0.1%曲拉通溶液进行通透,20min后加入200μl dapi染色液进行染色;染色20min后,用移液枪弃去dapi染液,用pbs溶液反复清洗10min,洗去曲拉通溶液;接下来置于dapi中,染色20min,最后置于pbs(0.1m,ph 7.2
‑
7.3)中,洗去表面dapi。之后在载玻片上滴加抗荧光猝灭剂铺片,封片后用激光共聚焦显微镜观察。同样,将去离子水(空白对照组)、实施例2步骤2)制备的壳聚糖纳米粒浓缩液(纳米粒溶液组)直接滴于圆窗膜表面,之后的处理步骤同上,用激光共聚焦显微镜观察其在圆窗膜表面分布的情况。结果如图9、10所示。图9可以看出:荧光普遍存在于鼓膜外上皮层到内上皮层中,且其分布呈现出类似于微型机器人结构系统类似的形状,表明有大量微型机器人给药装置分布在鼓膜结构中,甚至可以跨越鼓膜。图10可以看出:经微型机器人给药装置理后的圆窗膜有大小约为5μm的痕迹,形状为类圆形,提示微型机器人给药装置在圆窗膜表面成功发射装载红色尼罗红染料的有效负荷cs nps,比较纳米粒溶液组,未见明显红色痕迹,表明微型机器人给药装置组中的红色痕迹并非纳米粒的被动扩散导致的。
148.效果实施例6微型机器人给药装置的细胞毒性考察
149.采用mtt测定法检测cs nps和微型机器人给药装置结构系统的生物相容性:分别取生长状态良好的对数生长期l929细胞和hei
‑
oc1细胞,调整细胞悬液细胞密度至1
×
104个/ml,96孔板中每孔加入100μl细胞悬液,包含10%牛血清白蛋白的dmem,贴壁培养24h后移弃培养基,分别加入100μl由培养基配制的浓度为0、50,100,200,400,800μg/ml的实施例2步骤2)得到的cs nps及浓度为0、0.5,1,2,3,4张/ml的效果实施例1得到的去除聚碳酸酯模板的氨基功能化的磁性微管,培养24h后移弃培养基,pbs洗涤2次,加入100μl mtt(5mg/ml)。温育4小时后,小心除去上清液。加入100μl二甲基亚砜,振荡平板10分钟以溶解沉淀物。使用rt
‑
2100c酶标仪测定溶液在490nm波长处的吸光度。结果如图11所示:将不同浓度微型机器人给药装置的结构系统或cs nps与l929和hei
‑
oc1细胞共孵育24h后,通过mtt法检测得细胞存活率较高,说明该浓度范围内的cs nps及微型机器人给药装置的结构系统对正常纤维细胞和耳蜗细胞没有明显的细胞毒性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1