护理床内置上肢摆动机构以及护理床的制作方法
[0001]
本实用新型涉及辅助医疗康复训练设备技术领域,具体涉及一种护理床内置上肢摆动机构以及护理床。
背景技术:
[0002]
因为偏瘫、脑血栓、外伤等造成的上肢运动障碍的患者通常需要接受上肢的康复训练来辅助治疗,传统的上肢康复训练是通过康复治疗师或者家人辅助康复,消耗体力较大,训练模式的时间和训练力度不易控制,康复训练效果得不到保障,一般的康复护理床仅仅只能作为患者休息使用,床体只能够对病患起到支撑躺卧的作用,在病患人员卧床休息过程中,身体各部位无法进行恢复训练、受力运动和关节活动。传统的手臂摆动机构一般都是放在床的上面,用带子吊手部,或者是作为床的一个辅助装置使用,这样使用起来比较麻烦,尤其是家庭使用,搁置不方便,因此获得一种能够实现手部康复治疗的病人护理床的内置手部运动机构十分重要。
技术实现要素:
[0003]
为解决上述技术问题,一方面,本实用新型提供一种病人护理床的内置手部运动机构,包括摆臂组件以及连接在摆臂组件第一端的传动机构,所述传动机构包括转轴部,摆臂组件和传动机构一同绕转轴部转动设置,以使摆臂组件的第二端以转轴部为轴做圆周运动。
[0004]
传动机构包括圆弧部,圆弧部上开设有齿纹。齿纹末端固定有限位安全凸起,防止其旋转角度过大。转轴部包括开设在传动机构上的穿孔以及固定轴,固定轴穿过穿孔,且其与穿孔之间设置有轴承。
[0005]
本实用新型具有两种动力方式:其一为:包括第一电机和连接齿轮,第一电机输出轴与连接齿轮连接,连接齿轮与传动机构的齿纹啮合,由第一电机的输出轴上套设有与传动机构啮合的连接齿轮进行传动,能够分别进行康复训练,适合单只手需要进行康复的病人,不需要使用的一侧可以进行拆卸。其二为:包括第二电机和传动轴,传动轴两端均设置有转轴,第二电机通过同步带连接其中一个转轴,两转轴分别与两传动机构的齿纹啮合,转轴和传动轴之间固定有联轴器,能够满足两只手臂均受伤需要康复的病人,即第二电机通过同步带带动转轴,转轴带动传动机构转动,从而带动摆臂运动。
[0006]
还包括固定板,转轴部配合于固定板上,电机通过电机支架固定在床身上,电机固定在电机支架上。传动机构通过固定轴固定在固定板上,且通过卡簧卡住,固定板上自上而下依次固定有第一传感器支架和第二传感器支架,第一传感器支架上固定有复位传感器,第二传感器支架上固定有限位传感器,传动机构上固定有分别与复位传感器以及限位传感器对应的复位传感触头和限位传感触头。
[0007]
摆臂组件包括摆臂、摆臂底部向上的凹槽内插有触杆,且通过端部固定有闷盖,由闷盖限制在凹槽内;触杆上插有能随着触杆上自由上下的摆臂安全组件,摆臂安全组件包
括开关座、固定在开关座上的微动开关和弹簧,弹簧一端固定在开关座上,另一端与摆臂的凹槽抵触,当触杆在外力作用下,摆臂安全组件向上运动,微动开关与摆臂接触,微动开关输出信号,电机停止工作。摆臂端部固定螺孔板,螺孔板上线性分布调节孔。
[0008]
还包括手托板组件,其包括托板支架、手托板以及固定连接托板支架和手托板的连接件,托板支架通过锁紧螺丝固定在摆臂组件上,连接件通过螺栓或螺钉固定连接托板支架;连接件通过托板销连接手托板,使得手托板能够自由旋转。手托板为l型且其内部开设有由上至侧呈l型的穿孔,l型的穿孔内穿设有手部固定带,固定带两侧两端分别缝合有刺毛和软毛,便于粘合固定住手部。
[0009]
另一方面,本实用新型提供一种包含上述技术方案的护理床。
[0010]
与现有技术相比,本实用新型的优点在于:本实用新型在不使用的时候,能够完全隐匿于床身里,手托板可以根据手臂的不同长度找到合适的螺孔进行固定,满足各种手臂长度的患者;电机开始工作的时候,同步带带动转轴转动,转动的转动又带动与其捏合的传动机构的转动,从而实现绑在手托板上的手部的转动,在传动杆的作用下,能够实现两只手的同时运动,当检测到限位传感器的信号后,电机反转复位,完成一个周期,并且开始下一个周期运动;收到复位传感器信号后,电机停止工作,若在摆动过程中,触杆触碰到其他物体时候,微动开关向上触碰到摆臂,使得电机停止工作。
附图说明
[0011]
图1为本实用新型第一种方式结构示意图;
[0012]
图1a为图1a处放大图;
[0013]
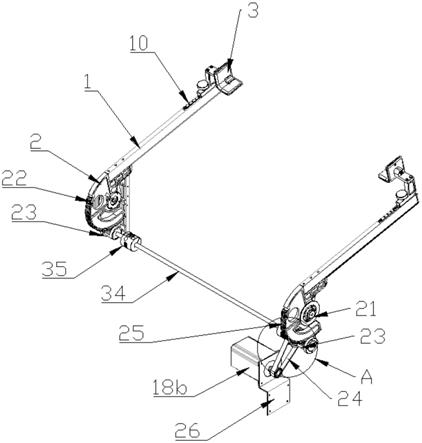
图2为本实用新型第二种方式安装结构示意图;
[0014]
图2a为图2b处放大图;
[0015]
图2b为图2d处放大图;
[0016]
图3a为本实用新型第一种方式投入使用示意图一;
[0017]
图3b为本实用新型放入床板后投入使用示意图二;
[0018]
图4为本实用新型手托板组件结构示意图;
[0019]
图5为本实用新型摆臂组件主视图;
[0020]
图6为图5c处放大图;
[0021]
图7为图5d-d处截面示意图;
[0022]
图8a为投入使用示意图一;
[0023]
图8b为投入使用示意图二;
[0024]
图8c为投入使用示意图三;
[0025]
图9为摆臂安全开关组件立体图;
[0026]
图10为图5e-e处截面示意图;
[0027]
附图标记:1-摆臂组件;2-传动机构;3-手托板组件;4-托板支架;5-手托板;6-连接件;7-托板销;8-l型的穿孔;9-手部固定带;10-螺孔板;11-摆臂;12-凹槽;13-触杆;14-闷盖;15-开关座;16-微动开关;17-弹簧;18a-第一电机;18b-第二电机;19-轴承;20-轴承套;21-固定轴;22-限位安全凸起;23-转轴;24-同步带;25-齿纹;26-电机支架;27-卡簧;28-第一传感器支架;29-第二传感器支架;30-复位传感器;31-限位传感器;32-复位传感触
头;33-限位传感触头;34-传动轴;35-联轴器;36-床身;37-床板;38-锁紧螺丝;39-凸出部;40-固定板。
具体实施方式
[0028]
为了使本领域技术人员更好地理解本实用新型,从而对本实用新型要求保护的范围作出更清楚地限定,下面就本实用新型的某些具体实施例对本实用新型进行详细描述。需要说明的是,以下仅是本实用新型构思的某些具体实施方式仅是本实用新型的一部分实施例,其中对于相关结构的具体的直接的描述仅是为方便理解本实用新型,各具体特征并不当然、直接地限定本实用新型的实施范围。
[0029]
参阅附图所示,本实用新型采用以下技术方案,一方面,本实用新型提供一种病人护理床的内置手部运动机构,包括摆臂组件以及连接在摆臂组件第一端的传动机构,所述传动机构包括转轴部,摆臂组件和传动机构一同绕转轴部转动设置,以使摆臂组件的第二端以转轴部为轴做圆周运动。
[0030]
传动机构包括圆弧部,圆弧部上开设有齿纹。齿纹末端固定有限位安全凸起,防止其旋转角度过大。转轴部包括开设在传动机构上的穿孔以及固定轴,固定轴穿过穿孔,且其与穿孔之间设置有轴承。
[0031]
还包括固定板,转轴部配合于固定板上,电机通过电机支架固定在床身上,电机固定在电机支架上。传动机构通过固定轴固定在固定板上,且通过卡簧卡住,固定板上自上而下依次固定有第一传感器支架和第二传感器支架,第一传感器支架上固定有复位传感器,第二传感器支架上固定有限位传感器,传动机构上固定有分别与复位传感器以及限位传感器对应的复位传感触头和限位传感触头。
[0032]
摆臂组件包括摆臂、摆臂底部向上的凹槽内插有触杆,且通过端部固定有闷盖,由闷盖限制在凹槽内;触杆上插有能随着触杆上自由上下的摆臂安全组件,摆臂安全组件包括开关座、固定在开关座上的微动开关和弹簧,弹簧一端固定在开关座上,另一端与摆臂的凹槽抵触,当触杆在外力作用下,摆臂安全组件向上运动,微动开关与摆臂接触,微动开关输出信号,电机停止工作。如图10所示,其中触杆为工字型,其通过其两端凸出部置于在摆臂上,开关座限制在触杆上。摆臂端部固定螺孔板,螺孔板上线性分布调节孔,能够实现根据不同患者手部长度进行调节。
[0033]
通过上述技术方案,在摆臂组件向下运动的时候,如果此时有其他物体在其下方,则触杆能够收到一个向上的力,此时弹簧被压缩,微动开关触碰到摆臂底端,则控制电机停止转动,以免压坏位于摆臂组件下方的其他物体。
[0034]
还包括手托板组件,其包括托板支架、手托板以及固定连接托板支架和手托板的连接件,托板支架通过锁紧螺丝固定在位于摆臂组件的螺孔板上,连接件通过螺栓或螺钉固定连接托板支架;连接件通过托板销连接手托板,使得手托板能够自由旋转。手托板为l型且其内部开设有由上至侧呈l型的穿孔,l型的穿孔内穿设有手部固定带,固定带两侧两端分别缝合有刺毛和软毛,便于粘合固定住手部。
[0035]
通过上述技术方案,托板支架通过锁紧螺丝固定在选择的适合的螺孔上,能够适用多种手臂长度的患者,且手托板能够自由旋转,能够适应摆臂组件在向上进行转动的时候的角度。
[0036]
传动机构中心具有轴承,轴承外固定轴承套,轴承中心固定有固定轴。传动机构的齿纹末端固定有限位安全凸起,防止其旋转角度过大。训练器调节机构包括电机、转轴,电机输出轴外套设有与转轴连接的同步带,电机通过同步带带动转轴转动,转轴上具有齿纹,其与传动机构啮合。电机通过电机支架固定在床身上,电机固定在电机支架上。
[0037]
本实用新型具有两种动力方式:其一为:包括第一电机和连接齿轮,第一电机输出轴与连接齿轮连接,连接齿轮与传动机构的齿纹啮合,由第一电机的输出轴上套设有与传动机构啮合的连接齿轮进行传动,能够分别进行康复训练,适合单只手需要进行康复的病人,不需要使用的一侧可以进行拆卸。其二为:包括第二电机和传动轴,传动轴两端均设置有转轴,第二电机通过同步带连接其中一个转轴,两转轴分别与两传动机构的齿纹啮合,转轴和传动轴之间固定有联轴器,能够满足两只手臂均受伤需要康复的病人,即第二电机通过同步带带动转轴,转轴带动传动机构转动,从而带动摆臂运动。
[0038]
在第一种方式下,只需要其中一侧的手部训练器固定的床体上安装限位传感器和复位传感器即可;在第二种方式下,分别需要左右两个限位传感器和左右两个复位传感器,分别安装在左右两侧手部训练器固定的床体上。本实用新型在投入使用的时候,其床板和两侧床体之间具有用于手托板组件以及摆臂工作的缝隙,床板前后两头固定在床体的上下两端处。
[0039]
本实用新型的工作原理为:电机开始工作的时候,同步带带动转轴转动,转轴的转动又带动与其捏合的传动机构的转动,从而实现绑在手托板上的手部的转动,在传动杆的作用下,能够实现两只手的同时运动,当检测到限位传感器的信号后,电机反转复位,完成一个周期,并且开始下一个周期运动;收到复位传感器信号后,电机停止工作,若在摆动过程中,触杆触碰到其他物体时候,微动开关向上触碰到摆臂,使得电机停止工作。在摆臂组件逐渐向上旋转的时候,首先可以将小臂绕着手肘关节向上旋转,随后可以继续向上使得大臂也跟着进行运动,如图8a、8b和8c所示。
[0040]
上述说明并非是对本实用新型的限制,本实用新型也并不仅限于上述举例,本技术领域的技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换,也应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1