用于智能减重训练器的H轨道的制作方法
用于智能减重训练器的h轨道
技术领域
1.本实用新型涉及轨道,具体涉及一种用于智能减重训练器的h轨道。
背景技术:
2.智能减重训练器是患者用于康复训练的重要设备,目前的智能减重训练器主要有落地式智能减重训练器和天轨式智能减重训练器。天轨式智能减重训练器是安装在天花板上的天轨智能减重训练系统,根据患者重心的变化,调整患者所受到的拉力,使患者下肢的负重始终保持恒定的。为增加患者的行走范围,目前的智能减重训练器采用的轨道为h轨道,此h轨道主要由横轨和2条纵轨构成,横轨的两端分别与2条纵轨滑动连接。在工作过程中,横轨两端分别沿2条纵轨的轴线移动时,横轨的两端会出现不同步移动情况的发生,从而影响康复训练效果。
技术实现要素:
3.本实用新型的目的是为了克服以上现有技术存在的不足,提供了一种用于智能减重训练器的h轨道。此用于智能减重训练器的h轨道防止打滑,且横轨两端可步移动,提高康复训练效果。
4.本实用新型的目的通过以下的技术方案实现:本用于智能减重训练器的h轨道,包括横轨和2条纵轨,所述横轨的两端通过相应的行走机构分别与2条纵轨连接,所述行走机构包括行走基座、行走电机、主动滚轮和杠杆支架,所述横轨的端部通过行走基座与纵轨滑动连接,所述行走电机安装于行走基座,所述杠杆支架的一端铰接于行走基座的一端,所述杠杆支架的另一端通过弹簧组件与行走基座连接;所述主动滚轮安装于杠杆支架的上端,且所述主动滚轮与纵轨连接,同时,所述行走电机的动力输出轴通过传动机构与主动滚轮连接;所述纵轨设有用于二维码,所述行走基座设有与二维码匹配的扫码器,所述扫码器与行走电机信号连接。
5.优选的,所述弹簧组件包括增力弹簧和调节柱,所述调节柱的上端与行走基座连接,所述调节柱的下端与杠杆支梁连接,所述增力弹簧套接于调节柱,且所述增力弹簧的上、下端分别抵住行走机座和杠杆支梁。
6.优选的,所述横轨的一端通过固定架与相应的行走基座连接,所述横轨的另一端通过滑动架与相应的行走基座连接。
7.优选的,所述固定架包括第一连接板和固定支架,所述固定支架的一端通过第一连接板与行走基座连接,所述固定支架的另一端与横轨的一端固定连接。
8.优选的,所述滑动架包括第二连接板、滑轮和滑动支架,所述滑动支架的一端通过第二连接板与行走基座连接,所述滑动支架通过滑轮与横轨的另一端滑动连接。
9.优选的,所述横轨的另一端的端部设有止动块。
10.优选的,所述传动机构包括动力齿轮和过渡齿轮,所述动力齿轮安装于行走电机的动力输出轴,所述过渡齿轮通过中间轴安装于行走基座,所述动力齿轮通过过渡齿轮与
主动滚轮的齿轮部连接。
11.优选的,所述行走基座设有从动滚轮,此从动滚轮与纵轨连接。
12.优选的,所述行走机构设有激光测距仪。
13.本实用新型相对于现有技术具有如下的优点:
14.1、本用于智能减重训练器的h轨道主要由横轨和2条纵轨构成,其中横轨的两端通过相应的行走机构与纵轨连接,并在纵轨设置二维码,行走机构中的行走基座设置与二维码匹配的扫码器,行走电机根据扫码器扫到的二维码确定位置,从而保证位于横轨两端的同步移动,提高康复训练效果。
15.2、本用于智能减重训练器的h轨道中的横轨的两端均通过行走机构与纵轨连接,此行走机构主要由行走基座、行走电机、主动滚轮和杠杆支架构成,其中杠杆支架的一端与行走基座铰接,另一端通过弹簧组件与行走基座连接,从而令主动滚轮紧压着纵轨,避免打滑的情况发生,提高了横轨移动的稳定性,从而进一步提高康复训练效果。
附图说明
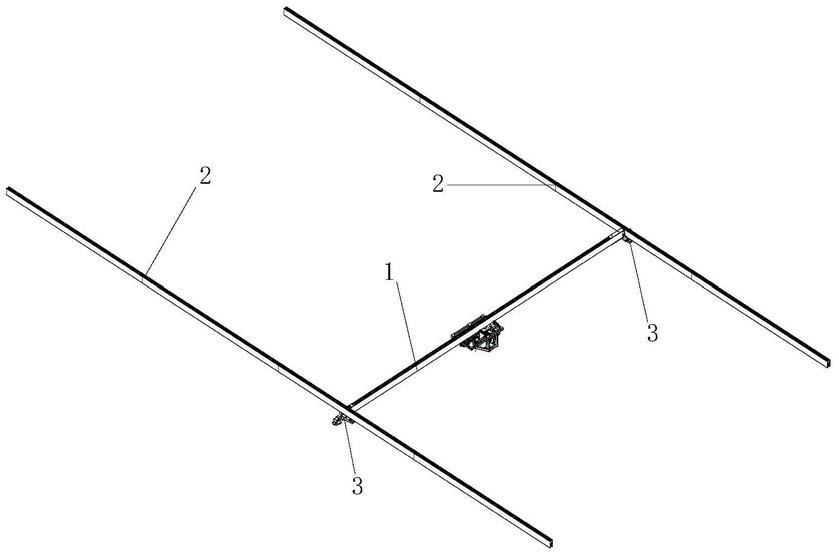
16.图1是本实用新型的用于智能减重训练器的h轨道的结构示意图。
17.图2是本实用新型的横轨的一端通过固定架与行走机构连接的结构示意图。
18.图3是本实用新型的横轨的另一端通过滑动架与行走机构连接的结构示意图。
19.图4是本实用新型的用于智能减重训练器的h轨道的侧视图。
20.图5是本实用新型的行走机构中的结构示意图。其中图中省略弹簧组件和行走基座。
21.图6是本实用新型的固定架与行走机构连接的示意图。
22.图7是本实用新型的滑动架与行走机构连接的示意图。
23.其中,1为横轨,2为纵轨,3为行走机构,4为行走基座,5为行走电机,6为主动滚轮,7为杠杆支架,8为弹簧组件,9为扫码器,10为增力弹簧,11为调节柱,12为固定架,13为滑动架,14为第一连接板,15为固定支架,16为第二连接板,17为滑轮,18为主滑轮,19为辅滑轮,20为滑动支架,21为动力齿轮,22为过渡齿轮,23为中间轴,24为从动滚轮。
具体实施方式
24.下面结合附图和实施例对本实用新型作进一步说明。
25.如图1至图7所示的用于智能减重训练器的h轨道,包括横轨和2条纵轨,所述横轨的两端通过相应的行走机构分别与2条纵轨连接,所述行走机构包括行走基座、行走电机、主动滚轮和杠杆支架,所述横轨的端部通过行走基座与纵轨滑动连接,所述行走电机安装于行走基座,所述杠杆支架的一端铰接于行走基座的一端,所述杠杆支架的另一端通过弹簧组件与行走基座连接;所述主动滚轮安装于杠杆支架的上端,且所述主动滚轮与纵轨连接,同时,所述行走电机的动力输出轴通过传动机构与主动滚轮连接;所述纵轨设有用于二维码,所述行走基座设有与二维码匹配的扫码器,所述扫码器与行走电机信号连接。具体的,二维码记录有位置信息,扫码器扫描相应的二维码后,扫码器将扫描到的信息输送给智能减重训练器的控制器,此控制器再发出控制信号控制行走电机动作。相对于现有的横轨采用无电机驱动方式与纵轨滑动连接,本实用新型既保证横轨可顺畅滑动,还保证了横轨
的两端可同步移动,而且减少患者沿纵轨方向移动时的阻力,提高了康复效果。其中,弹簧组件和杠杆支架等的共同作用,令主动滚轮紧压着纵轨,从而提高横轨移动的稳定。为提高了行走机构带动横轨稳定移动,主动滚轮采用2个,此2个主动滚轮通过滚动轴安装于杠杆支架上端的两侧。而主动滚轮的一端设有齿轮部,此齿轮部与传动机构啮合,而主动滚轮的另一端设有圆滑的滚动轮,从而可相对纵轨顺畅的滚动。
26.所述弹簧组件包括增力弹簧和调节柱,所述调节柱的上端与行走基座连接,所述调节柱的下端与杠杆支梁连接,所述增力弹簧套接于调节柱,且所述增力弹簧的上、下端分别抵住行走基座和杠杆支梁。具体的调节柱通过螺纹连接方式与杠杆支梁连接,以方案调节调节柱伸出的长度,从而调节增力弹簧的弹性力,以控制主动滚轮压紧纵轨的力度,故可防止打滑的情况发生,进一步保证横轨的两步可同步、稳定的移动,提高康复训练的效果。
27.所述横轨的一端通过固定架与相应的行走基座连接,所述横轨的另一端通过滑动架与相应的行走基座连接。具体的,所述固定架包括第一连接板和固定支架,所述固定支架的一端通过第一连接板与行走基座连接,所述固定支架的另一端与横轨的一端固定连接。所述滑动架包括第二连接板、滑轮和滑动支架,所述滑动支架的一端通过第二连接板与行走基座连接,所述滑动支架通过滑轮与横轨的另一端滑动连接。其中,第一连接板的两端通过螺栓分别与行走基座和固定支架连接,此固定支架包含2张固定板,此2张固定板通过螺栓分别与横轨的一端的上、下侧固定连接。而第二连接板的两端也通过螺栓分别与行走基座和滑动支架连接,此滑动支架包含2张滑板,此2张滑板分别位于横轨的另一端的上、下侧。滑板的内侧通过滑轮与横轨的另一端滑动连接,此滑轮包含2个主滑轮和辅滑轮,以保证滑动的稳定性。在工作中时,两条纵轨之间的距离沿纵轨的轴线方向无法保持一直相等,则横轨的另一端通过滑动架连接,从而可保证康复训练的顺利进行。
28.所述横轨的另一端的端部设有止动块。止动块可防止横轨的另一端自滑动架脱落,从而进一步提高工作的可行性。
29.所述传动机构包括动力齿轮和过渡齿轮,所述动力齿轮安装于行走电机的动力输出轴,所述过渡齿轮通过中间轴安装于行走基座,所述动力齿轮通过过渡齿轮与主动滚轮的齿轮部连接。此结构简单,安装方便且工作可靠。
30.所述行走基座设有从动滚轮,此从动滚轮与纵轨连接。从动滚轮可防止行走机构的晃动,进一步提高横轨移动的稳定性。
31.所述行走机构设有激光测距仪。利用激光测距仪检测行走机构至纵轨的起点位置距离,控制器还可根据此距离控制行走电机动作,从而进一步保证横轨的两端同步移动。
32.上述具体实施方式为本实用新型的优选实施例,并不能对本实用新型进行限定,其他的任何未背离本实用新型的技术方案而所做的改变或其它等效的置换方式,都包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1